 弱图重计算感知,智驾系统摒弃高精地图会是大势所趋吗?
弱图重计算感知,智驾系统摒弃高精地图会是大势所趋吗?
电子发烧友网报道(文/周凯扬)智能驾驶系统作为现在各新车型上的最大卖点之一,已经吸引了不少厂商加入研发行列中,其中不乏初创企业、大厂甚至是车企自己。然而考虑到智能驾驶研发门槛极高、投入巨大,且在高安全性上的实现往往不是一年半载就能达成的,所以对于不愿投入智驾开发无底洞又想提高竞争力的车企,尤其是部分新势力来说,第三方方案或许是最好的出路。
反观提供第三方智能驾驶系统解决方案的厂商,如何与车企达成合作,做好定制化,才是痛点所在。一把揽过所有活是不现实的,传感器、处理器、地图、操作系统以及算法不可能全部自研,所以从中选取一部分,提供一个平台化的方案是最稳妥的方案。
诸如百度、华为、元戎启行等厂商,都采用了这套方案,但他们在细节与商用进度上还是有所不同,正巧在上海车展前后,几家厂商也都公布了其智驾系统全新的情报。值得一提的是,这几家似乎都对高精地图呈现出了不尽相同的态度,我们不妨放在一起对比一下。
华为ADS 2.0:逐步抛弃高精地图,扩大覆盖城市
车展前夕,华为公布了他们的下一代智驾系统方案ADS 2.0,并着重强调了他们的城区智驾领航辅助功能。华为将从今年开始推动这一功能在全国各大城市的落地,首先是上海、深圳、广州、杭州和重庆五大城市,但该阶段仍需要高精度地图。在自学习训练的进程再获突破后,华为预计于Q3推出无需高精地图的版本,并把覆盖城市扩大到15个,最终于今年Q4覆盖到45个城市。
至于此次ADS 2.0的硬件平台,据了解问界M5智驾版用到了华为的MDC610计算平台,算力高达200TOPS。从后续支持极狐阿尔法S全新Hi版和阿维塔11全系列等机型上来看,ADS 2.0的硬件平台都是从MDC610起步了。再看问界 M5智驾版的配置清单,我们还可以了解其该车型上的传感器数量配置,对ADS 2.0的传感器融合能力有个大致了解。

问界M5智驾版 / 赛力斯
问界M5智驾版无论是后驱还是四驱版,其传感器配置都一样,包括一个激光雷达、3个毫米波雷达、12个超声波雷达、7个高感知摄像头和4个全景镜头。靠着整套ADS 2.0加成的智驾系统,问界M5智驾版实现了智能驾驶辅助主动安全、辅助泊车与辅助巡航和哨兵模式等功能。
不难看出,在华为的这套方案中要想真正抛弃高精地图,包含计算平台、传感器平台在内的硬件实力要求也不能低。要想真正推动无高精地图化,还是得将整体成本打下来,毕竟搭载高阶智驾系统的低价车型,才会是未来的市场主力军。
元戎启行:不依赖高精地图,更高的成本竞争力
在上个月,L4级自动驾驶解决方案的提供商元戎启行也推出了他们的全新智驾方案DeepRoute-Driver 3.0。要知道,此前元戎启行就推出过量产成本不到2万元的智驾前装方案,不过此前的智驾方案主要是面向Robotaxi运营这一场景来打造的,并没有针对民用推出对应版本。这次发布的DeepRoute-Driver 3.0进一步压低了成本,元戎启行基于该架构推出了两款行泊一体的新品,D-PRO和D-AIR,两者均不依赖高精地图,仅靠导航地图就能实现高阶智驾。
据其描述,即使在没有高精地图的前提下,Driver 3.0依然可以感知到其涵盖的精确道路信息,比如车道线、信号灯、路标等等,同时实时定位车辆位置、所在车道以及与车道线之间的距离。
其中D-PRO的硬件成本控制在了1.4万元人民币,搭载7颗摄像头和1个激光雷达,以及算力达200TOPS以上的计算平台。D-PRO可实现在导航地图下的全域点到点智驾、自主决策规划和VPA高阶记忆泊车。从其官方发布的合作新闻来看,D-PRO搭载的计算平台应该就是基于英伟达的Drive Orin SoC了。
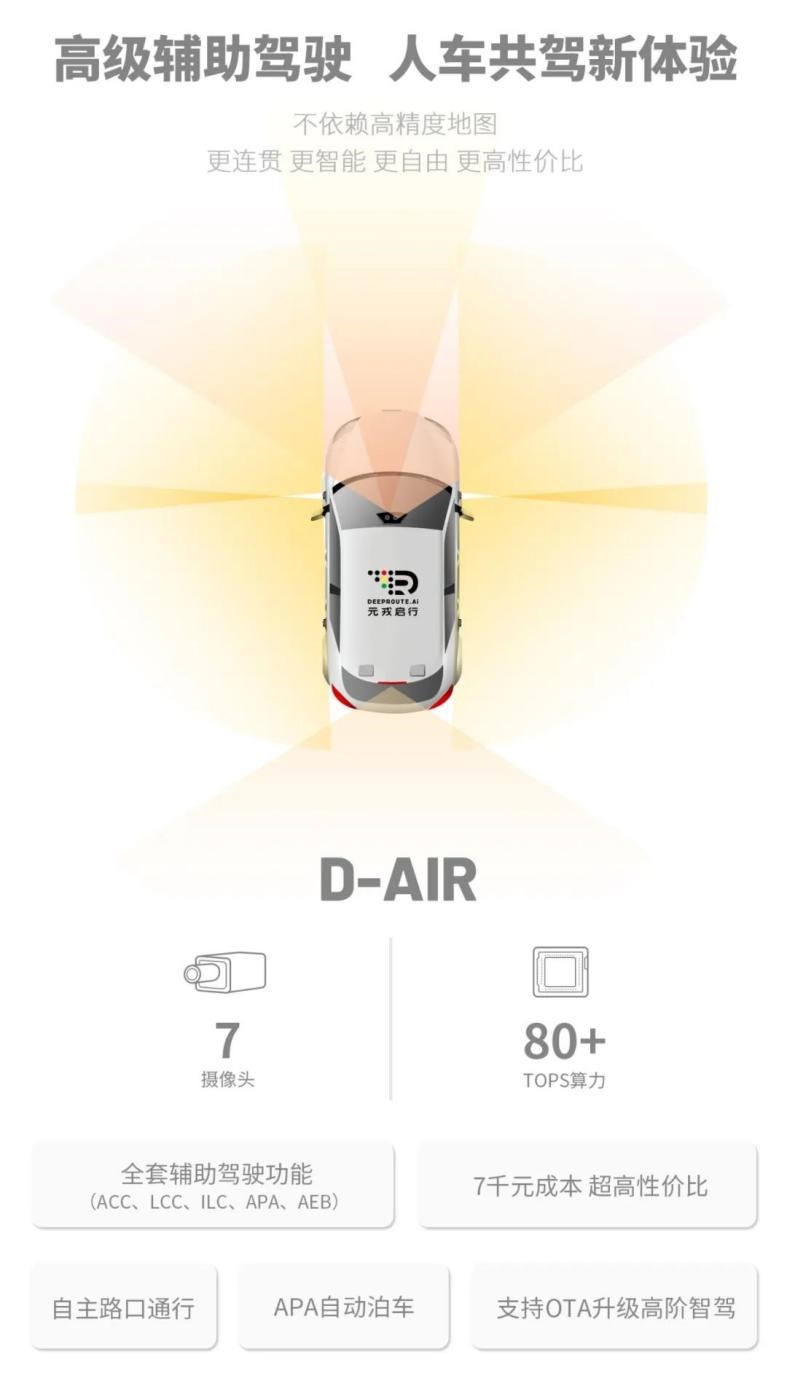
D-AIR智能驾驶 / 元戎启行
而D-AIR则直接把硬件成本控制在了7千元,仅靠7颗摄像头的纯视觉感知和80TOPS以上的计算平台,就能完成ACC、LCC、APA等一众辅助智驾功能。最关键的是,元戎启行还提供后续的OTA升级,会继续解锁新的功能,持续提升两套方案的智驾能力。所以即便是当下智驾性能低于D-PRO的D-AIR,未来也有升级至高级智驾的潜力。
百度Apollo:开放自主可控,高精地图轻量化
近日,百度Apollo发布了全新升级的驾舱图产品矩阵,同时发布了《智能驾驶开放白皮书》。其中百度表示充分理解并尊重车企对“智能化自主可控”的诉求,智能化合作伙伴应该与车企一起探索并构建新型的合作关系,提供开放的体验定义、自主体验进化和全周期的OTA服务等。
在智驾方面,百度Apollo推出了其旗舰城市智驾产品Apollo City Driving Max,搭建两颗英伟达Orin X,总算力高达508 TOPS。百度强调这是国内唯一一款靠纯视觉感知就能在城市道路上提供连贯体验的产品,激光雷达则可以用于实现感知冗余。
至于高速智驾、行泊一体产品Apollo Highway Driving Pro,百度则将其算力平台从TI的双TDA4-VM升级至单TDA4-VH,以更低算力和更低成本实现高阶行泊一体,首台搭载该产品的车型为新款岚图FREE。在其他计算硬件平台的选择上,百度选择了与黑芝麻智能达成合作。16日上海车展前夕,百度Apollo宣布将黑芝麻智能***作为首选***合作伙伴,未来将会把Apollo Highway Driving Pro部署到华山二号A1000芯片算力平台上,预计将在Q3正式发布。
考虑到百度Apollo本身的产品定位就是“驾舱图”,此次矩阵升级自然也少不了智能地图。首先是车载导航地图,据百度声称质量、性能和数据实时性均获得了提升,且百度本身就拥有百度地图汽车版这一优势产品存在,Apollo也提供了多种接入方式。像红绿灯倒计时这种功能,就是通过大数据计算和官方数据接入来实现的。
至于高精地图,百度Apollo并没有选择将其边缘化,而是走起了轻量化路线。比如上面提到的Apollo City Driving Max,就选择了搭载轻量级高精地图,据其描述,要比行业通用的传统高精地图“轻”近80%。尚不清楚这里的轻量化是地图大小轻量化还是测绘轻量化,但不管是哪种,无疑都是加快城市高精地图泛化的实现方式。所以百度在深厚的地图技术积累下,是肯定不会放弃将“图”作为优势的。
写在最后
从以上三家的新方案来看,慢慢抛弃或淡化对高精地图的依赖已经成为一种趋势。这其实也很好理解,感知层硬件的成本降低与普及速度加快了,计算层硬件的性能和工艺也翻倍了,算法层的软件也在逐步完善,反倒是高精地图还是在缓步前行,只有高速路完成覆盖,城区道路推进缓慢。
但具体成效如何,感知和计算上的突破能否补足舍弃高精地图带来的一定信息缺失,都是我们需要在未来持续观察的。毕竟智能驾驶发展至今,过去的所有设计都是在做加法,如今开始做减法固然有降低成本的考量在内,安全性是否会也一并打折扣,仍要等待验证。
发布评论请先 登录
相关推荐
为什么讲MEMS替代传统传感器是大势所趋?
轩辕智驾红外感知智驾系统助力吉利翼真L380上市
天合光能:TOPCon组件成为主流,700W+大势所趋
自动驾驶仿真测试实践:高精地图仿真

英特尔发力中国智能座舱市场,携手本地伙伴打造软件定义汽车新体验
大疆车载与高通联合发布基于高通智驾芯片SA8650P的智驾方案
万界星空科技MES管理系统在人工智能方面的应用
洲明科技亮相北京InfoComm展高峰会,数字光显新引擎“LED+AI”

IPv6 是大势所趋,也是机遇所在


【鸿蒙千帆起】高德地图携手HarmonyOS NEXT,开启智能出行新篇章
高精地图在自动驾驶的重要性分析
自动驾驶地图研究:SD pro MAP快速上车,助力城市NOA轻地图智驾方案






 工商网监
工商网监
评论