 机器人焊缝追踪是怎么实现实时补偿的
机器人焊缝追踪是怎么实现实时补偿的
随着制造业的发展,机器人焊接技术已经成为许多制造企业的重要工具。而机器人焊接技术中的关键环节之一就是焊缝追踪,它能够在焊接过程中实时检测焊缝的位置和形状,然后根据检测结果进行实时补偿,以保证焊接的准确性和稳定性。
那么,机器人焊缝追踪是如何实现实时补偿的呢?本文将详细介绍机器人焊缝追踪实时补偿的具体步骤。
一、焊缝检测
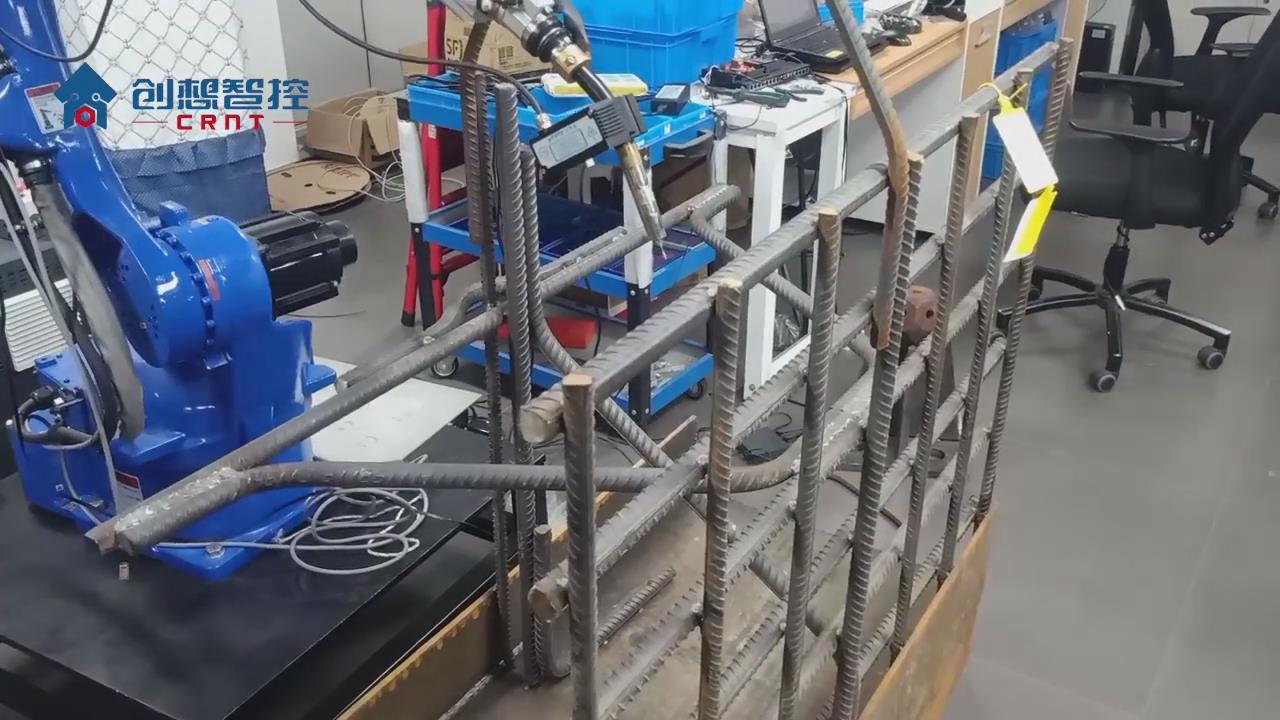
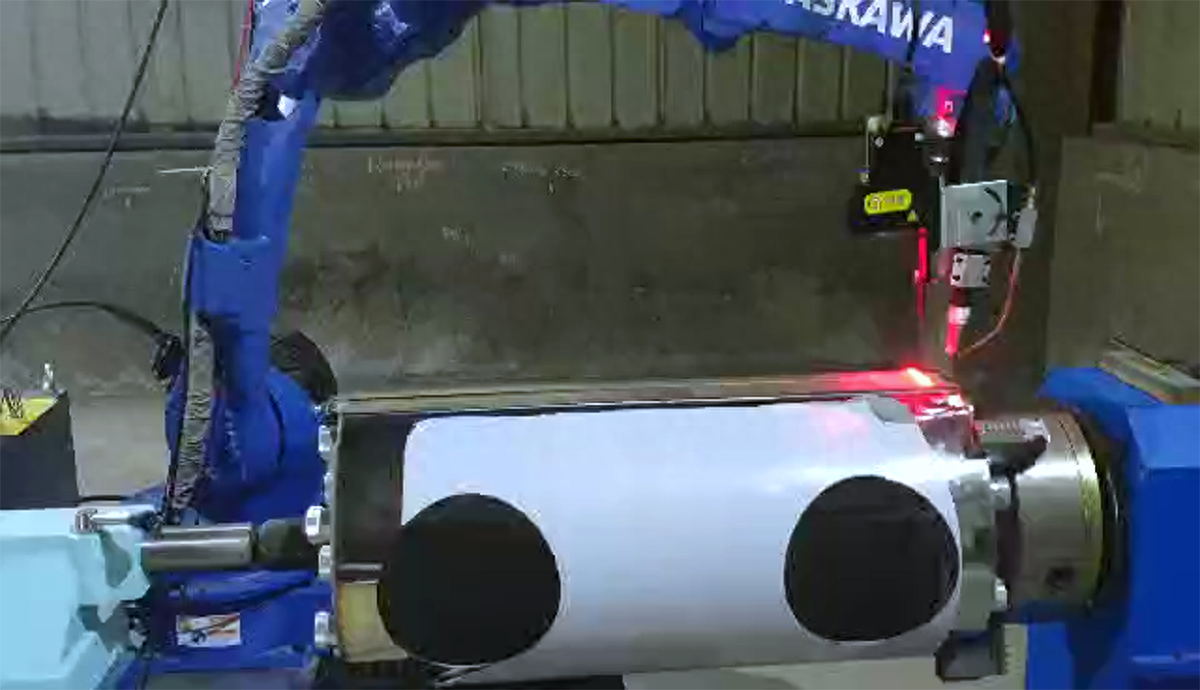
机器人焊缝追踪的第一步是焊缝检测,这通常需要使用传感器进行。传感器可以实时监测焊缝的位置和形状,然后将这些信息传输给机器人控制系统。传感器的种类很多,如光学传感器、激光传感器、摄像头等,不同传感器的选择会受到许多因素的影响,例如工作环境、焊接材料等。
二、坐标转换
由于机器人的坐标系和焊缝的坐标系通常不一致,所以在机器人焊缝追踪的过程中,需要进行坐标转换。具体来说,传感器检测到的焊缝位置、形状等信息需要转换为机器人工具坐标系下的坐标。这就需要进行几何变换,例如旋转、平移等操作。在实际应用中,通常采用数学模型进行坐标转换。
三、计算偏差
通过坐标转换,我们就可以将检测到的焊缝信息转换为机器人工具坐标系下的坐标。接下来,我们需要计算机器人与焊缝之间的偏差量。这通常通过计算机器人当前位置与焊缝位置之间的欧几里得距离来实现。如果机器人与焊缝之间的距离超过了允许的误差范围,就需要进行实时补偿。
四、实时补偿
在计算出偏差后,我们就可以进行实时补偿。实时补偿的目的是通过控制机器人运动轨迹来减少偏差。具体来说,实时补偿需要进行的步骤包括:
1.确定补偿方向:根据偏差量的正负,确定机器人应该向左还是向右,向上还是向下进行调整。
2.计算补偿距离:根据偏差量的大小,计算机器人应该移动的距离。
3.实现实时补偿:将补偿距离和补偿方向转换为机器人控制系统可以理解的指令,控制机器人进行实时补偿操作。
五、焊接控制
通过实时补偿操作,机器人可以更加准确地对焊缝进行定位,并进行精准的焊接。但是,在焊接过程中,由于机器人和焊缝之间的距离可能会不断变化,因此机器人焊缝追踪需要通过不断的反馈控制来实现。通过不断地检测焊接过程中的偏差,并进行实时补偿,机器人可以更加精确地控制焊接路径,从而保证焊接的合格率和质量。
总之,机器人焊缝追踪实时补偿是一个复杂的过程,需要通过传感器检测焊缝,进行坐标转换、计算偏差和实时补偿等多个步骤来实现。通过这种技术,机器人可以准确追踪焊缝,保证焊接的质量和稳定性,在制造业中具有广泛的应用前景。
审核编辑:汤梓红
-
机器人
+关注
关注
211文章
28390浏览量
206957 -
制造业
+关注
关注
9文章
2236浏览量
53583 -
焊缝
+关注
关注
1文章
98浏览量
12972
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
如何避免焊接机器人焊缝偏移

创想智控激光焊缝跟踪系统协同松下机器人自动焊接高机贴板的应用
焊接机器人焊缝寻位跟踪系统的作用
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
创想激光焊缝跟踪系统携手新松机器人 实现钢结构自动化焊接

创想激光焊缝跟踪器适配昌泓机器人实现智能焊接的案例

创想激光焊缝跟踪系统适配钱江机器人在智能焊接领域的应用

创想焊缝跟踪系统适配藦卡机器人进行自动化焊接的应用
创想焊缝跟踪系统适配欢颜机器人真正实现焊接自动化和智能化

创想视觉焊缝跟踪系统适配广数机器人进行自动化焊接的应用
焊接机器人焊缝偏移的原因与解决方案





 工商网监
工商网监
评论