 串口通讯的术语解释
串口通讯的术语解释
关于串口通讯的术语解释
最近在研究串口通讯,其中有几个比较重要的概念,RS-232这种适配于上位机和PC端进行连接,RS-232只限于PC串口和设备间点对点的通信。它很简单的就可以进行连接,由于串口通讯是异步的,也就是说你可以同时向两端或者更多进行数据发送,它们之间的传输数据类型是byte,串口通信最重要的参数是波特率、数据位、停止位和奇偶校验。对于两个进行通信的端口,这些参数必须匹配。接下来先解释一下几个关于串口通讯的术语:
第一个波特率,这个东西在不同领域都有涉及,在串口通讯中两个串口之间通讯之间的信号单元叫做码元,每分钟传递的信号(码元)也就是波特率;
第二个数据位、停止位:这个听名字就知道是啥意思了,在传递数据过程之前,机器会识别你的数据是个啥,然后根据这个类型,去调整不同的起始位、停止位。
第三个奇偶校验:就是想知道你这个数据有多大,多长,因为传输都是1 和 0 ,具体校验方法如下:
奇校验:就是让原有数据序列中(包括你要加上的一位)1的个数为奇数 ---- 1000110(0)你必须添0这样原来有3个1已经是奇数了所以你添上0之后1的个数还是奇数个。
偶校验:就是让原有数据序列中(包括你要加上的一位)1的个数为偶数 ---- 1000110(1)你就必须加1了这样原来有3个1要想1的个数为偶数就只能添1了。
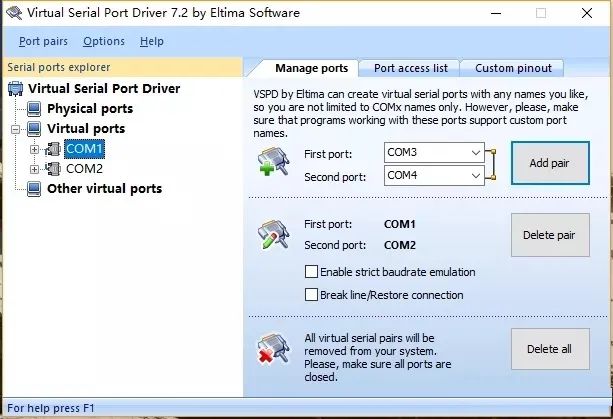
如果想要在C#中玩转串口通讯或者模拟串口,你必须先搞个硬件,当然我们是在模拟,那你就弄个模拟的工具呗,
安装好了之后,桌面会有图标,然后打开,添加一个串口,具体请看下图:
串口通讯代码的编写
下面我们就开始代码的实现了,创建一个.NET Fwk的 Winform 项目,然后开始我们的代码:
SerialPort sp1 = new SerialPort();
public Form1()
{
InitializeComponent();
}
private void Form1_Load(object sender, EventArgs e)
{
string[] strCom = SerialPort.GetPortNames();
if (strCom == null)
{
MessageBox.Show("本机没有串口!", "Error");
return;
}
foreach (string com in System.IO.Ports.SerialPort.GetPortNames())
{
cbCom.Items.Add(com);
}
cbCom.SelectedIndex = 0;
sp1.BaudRate = 9600;
Control.CheckForIllegalCrossThreadCalls = false;
sp1.DataReceived += Sp1_DataReceived;
sp1.DtrEnable = true;
sp1.RtsEnable = true;
sp1.ReadTimeout = 1000;
sp1.Close();
}
在窗体加载中,我们尝试获取了本机的所有串口,通过 SerialPort.GetPortNames() 方法,会返回一个字符串数组,如果没有就返回null,在其中,我们还设置了波特率,通过SerialPort类下的 DataReceived 方法,来监听我们的数据回传,还启用了DTR\\DTS请求方式,通过 ReadTimeOut 对数据读取超时进行了控制。
既然我们监听了数据回传,那么在这个方法中,通过 ReadTimeOut.Read 进行了读取,直接从0到最后,截取完毕。
private void Sp1_DataReceived(object sender, SerialDataReceivedEventArgs e)
{
if (sp1.IsOpen) //判断是否打开串口
{
//输出当前时间
DateTime dt = DateTime.Now;
txtReceived.Text += dt.GetDateTimeFormats('f')[0].ToString() + "\\r\\n";
Byte[] receivedData = new Byte[sp1.BytesToRead]; //创建接收字节数组
sp1.Read(receivedData, 0, receivedData.Length); //读取数据
AddContent(new UTF8Encoding().GetString(receivedData));
}
else
{
MessageBox.Show("请打开某个串口", "错误提示");
}
}
private void AddContent(string v)
{
this.BeginInvoke(new MethodInvoker(delegate
{
txtReceived.AppendText(v);
txtReceived.AppendText("\\r\\n");
}));
}
当然以上的操作都必须在打开串口之后才能进行,打开串口这个还是比较费劲的,因为要设置各种参数,也就是我刚才说的那几个概念,如果不对,你让其他的端口来访问就找不到了。
private void button2_Click(object sender, EventArgs e)
{
if (!sp1.IsOpen)
{
try
{
string serialName = cbCom.SelectedItem.ToString();
sp1.PortName = serialName;
string strBaudRate = cbBaudRate.Text;
string strDateBits = cbDataBits.Text;
string strStopBits = cbStop.Text;
Int32 iBaudRate = Convert.ToInt32(strBaudRate);
Int32 iDateBits = Convert.ToInt32(strDateBits);
sp1.BaudRate = iBaudRate; //波特率
sp1.DataBits = iDateBits; //数据位
switch (cbStop.Text) //停止位
{
case "1":
sp1.StopBits = StopBits.One;
break;
case "1.5":
sp1.StopBits = StopBits.OnePointFive;
break;
case "2":
sp1.StopBits = StopBits.Two;
break;
default:
MessageBox.Show("Error:参数不正确!", "Error");
break;
}
switch (cbCheck.Text) //校验位
{
case "无":
sp1.Parity = Parity.None;
break;
case "奇校验":
sp1.Parity = Parity.Odd;
break;
case "偶校验":
sp1.Parity = Parity.Even;
break;
default:
MessageBox.Show("Error:参数不正确!", "Error");
break;
}
if (sp1.IsOpen == true)
{
sp1.Close();
}
//设置必要控件不可用
cbCom.Enabled = false;
cbBaudRate.Enabled = false;
cbDataBits.Enabled = false;
cbStop.Enabled = false;
cbCheck.Enabled = false;
sp1.Open(); //打开串口
button2.Text = "关闭串口";
}
catch (System.Exception ex)
{
MessageBox.Show("Error:" + ex.Message, "Error");
return;
}
}
else
{
cbCom.Enabled = true;
cbBaudRate.Enabled = true;
cbDataBits.Enabled = true;
cbStop.Enabled = true;
cbCheck.Enabled = true;
sp1.Close(); //关闭串口
button2.Text = "打开串口";
}
}
最后也就是发送了,刚才我们接收使用Read,发送也当然很简单,是Write...
private void button1_Click(object sender, EventArgs e)
{
byte[] sendData = null;
if (!sp1.IsOpen) //如果没打开
{
MessageBox.Show("请先打开串口!", "Error");
return;
}
String strSend = txtSendStr.Text;
try
{
sendData = Encoding.UTF8.GetBytes(txtSendStr.Text.Trim());
sp1.Write(sendData, 0, sendData.Length);
}
catch (Exception ex)
{
MessageBox.Show("Error:" + ex.Message, "Error");
}
}
-
RS-232
+关注
关注
0文章
393浏览量
50166 -
串口通信
+关注
关注
34文章
1629浏览量
55934 -
上位机
+关注
关注
27文章
946浏览量
55152
发布评论请先 登录
相关推荐
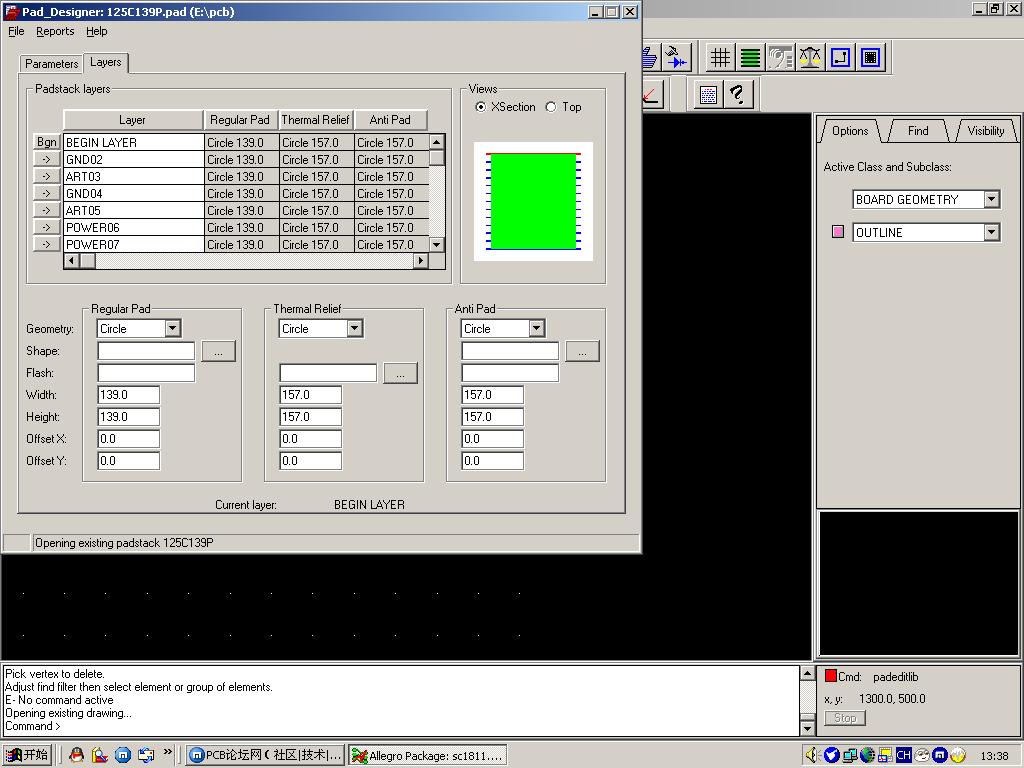
Allegro做padstack时的术语解释





 工商网监
工商网监
评论