 FOC电机算法设计基础知识1
FOC电机算法设计基础知识1
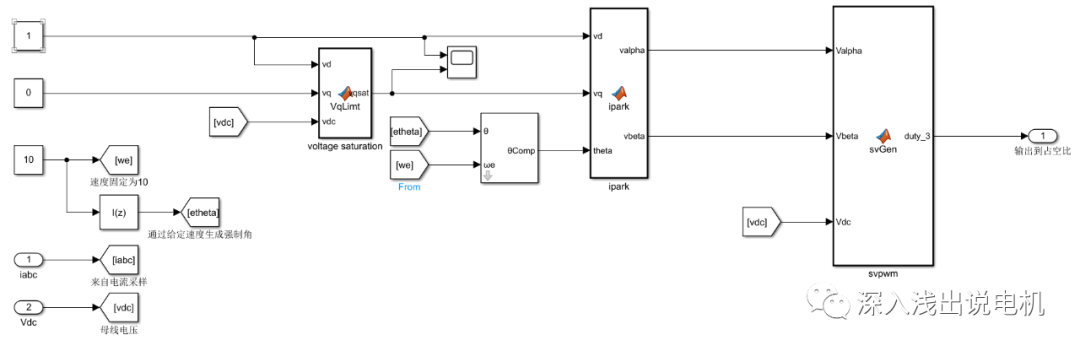
FOC算法(Field-Oriented Control,场定向控制算法)是一种常用于交流电机控制的算法。它的目标是将交流电机的控制问题转换为直流电机的控制问题,从而使得交流电机可以像直流电机一样被有效控制。
FOC算法的基本思想是将交流电机转换为一个等效的直流电机模型,通过控制电机的电磁场方向和大小来控制电机的转速和扭矩。
电机扭矩和什么有关:
电机扭矩是指电机输出的转矩大小,也就是电机转子所产生的力矩。
在直流电机中,电机扭矩与电枢电流成正比,与磁场强度成正比,与极对数成正比;
在交流电机中,电机扭矩与电源电压、电流、功率因数、电机转速。
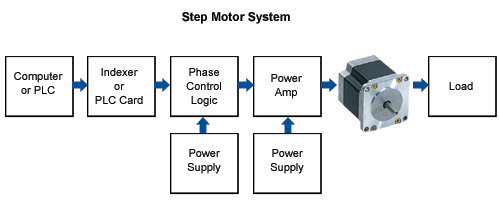
什么是交流电机?
交流电机通常由两部分组成:定子和转子。定子是一个不动的部件,通常由若干个线圈和铁芯构成。当电流通过定子线圈时,会在铁芯中产生磁场。转子是一个旋转的部件,通常由若干个磁极和铁芯构成。当磁场在定子铁芯中旋转时,它会在转子铁芯中产生感应电流,从而使转子开始旋转。
交流电机的运行原理基于磁场的相互作用和电磁感应现象。当交流电流通过定子线圈时,它会在定子铁芯中产生磁场,这个磁场会随着电流的变化而周期性地改变方向。由于转子铁芯中感应到的磁场也是周期性地改变方向,因此转子会产生旋转运动。
和直流电机的区别:
1.供电方式不同:交流电机采用交流电源供电,而直流电机采用直流电源供电。
2.构造不同:交流电机和直流电机的内部结构和构造不同。交流电机的转子和定子都包含线圈,它们的磁场相互作用产生电动力。而直流电机的定子通常是静止的,它的磁场产生电动力与转子的磁场产生电动力相互作用。
3.调速方式不同:交流电机的转速通常是由电源频率决定的,而直流电机的转速可以通过改变电源电压或者改变电枢电流来调节。
4.应用场合不同:交流电机适用于高功率、高速、低载荷的场合,如空调、电冰箱、电风扇等。直流电机适用于需要调速和反转控制的场合,如电动汽车、电动工具等。
直流电是指电流方向不变的电流,即电荷在电路中只沿一个方向移动的电流。交流电是指电流方向和大小都随时间变化的电流。它的电流方向在时间上周期性地变化,即正负交替变化。通常情况下,交流电的频率是指单位时间内电流正负周期性变化的次数,单位为赫兹(Hz),而电压和电流的大小则会随着时间的变化而不断变化。与交流电相比,直流电的优点是电压稳定,不容易产生电磁干扰,适用于一些对电源质量要求较高的场合
1.交流电转直流电:这个过程通常称为整流,可以使用二极管或者桥式整流电路实现。二极管整流只能将单相交流电转换为单极(直流)电,而桥式整流电路可以将三相或单相交流电转换为直流电。
2.直流电转交流电:这个过程通常称为逆变,可以使用逆变器实现。逆变器可以将直流电转换为交流电,并且可以实现输出不同频率和电压的交流电,因此逆变器被广泛应用于家庭电器、电动车、太阳能等领域。
什么是相位电压?
相位是指某个物理量的周期性变化相对于某个参考点的时间偏差,通常以角度或弧度的形式表示。
相位电压是指在交流电路中,某一相电压相对于电路的共同中性点或地点的电压大小和相位角度。
在三相交流电路中,相位电压是指每个相线与电路的共同中性点或地点之间的电压差。如果电路的中性点与地点相同,则相位电压就是每个相线之间的电压差。与相位电压相关的概念还包括线电压和有效电压。
相电压是指在多相电路中,每个相线与电路的中性点之间的电压差,也可以称为相间电压。相电压是多相交流电路中的一种电压表示方式。
在三相交流电路中,相电压是指每个相线之间的电压差,即A相电压与B相电压、B相电压与C相电压、C相电压与A相电压之间的电压差。在三相电路中,相电压的大小一般是线电压的根号3倍。
线电压是指交流电路中相邻两个相线之间的电压大小,有效电压是指交流电路中产生等效功率的电压大小。
PWM代表脉宽调制(Pulse Width Modulation)。它是一种常用于电子设备和电路中的调制技术,用于控制电子信号的大小、形状和频率。从数学的角度来看,PWM是一种周期性的数字信号,由一个固定频率的载波信号和一个可变占空比的调制信号组成。
PWM信号的周期是固定的,由载波信号的频率决定;而占空比则是可变的,表示调制信号在一个周期内处于高电平的时间与整个周期时间的比例。占空比越大,输出电压或电流的平均值越高,反之亦然。也就是说控制一个周期内电信号的脉冲宽度和频率,来控制输出电压或电流的大小。通常,一个周期内的脉冲宽度和频率是可以调节的,从而可以控制输出信号的平均值和波形。
1.载波频率:也称为PWM信号的工作频率,通常是固定的,一般选择几千赫兹至几十千赫兹的频率,以保证足够高的调制精度和低的失真。
2.调制波形:这是用于控制PWM信号占空比的调制信号,可以是模拟信号或数字信号。在数字控制系统中,调制波形通常是一个由微处理器或FPGA生成的数字信号。
3.占空比:占空比是指PWM信号中高电平时间与一个周期时间之比。在实际应用中,占空比通常是由调制波形的幅值来控制的。例如,当调制波形的幅值为0时,PWM信号输出为低电平;当调制波形的幅值为最大值时,PWM信号输出为最大的高电平。
当确定了这三个参数后,PWM信号就可以通过将调制信号与载波信号相乘来生成。由于载波频率固定,而调制信号占空比可变,所以PWM信号的平均值可以通过改变占空比来控制。
PWM波如何生成?
1.使用计时器/计数器:在单片机或数字信号处理器(DSP)等数字电路中,可以使用计时器/计数器来生成PWM波形。计时器/计数器通过计算指定的时间间隔来产生定时的脉冲信号,通过改变脉冲的占空比,即脉冲宽度与周期的比值,来生成PWM波形。
2.使用模拟电路:可以使用模拟电路来生成PWM波形。例如,通过将输入信号与三角波信号进行比较,可以生成PWM波形。比较器可以使用运算放大器或其他器件实现。
51定时器,我以前写过:
1.定时器0:定时器0是8位定时器,它具有13位计数器。它可以通过不同的工作模式(模式0、模式1、模式2和模式3)来实现不同的计时和计数功能。一般情况下,定时器0被广泛应用于控制延时,计数频率可达到最大12MHz。
2.定时器1:定时器1是16位定时器,它具有16位计数器。它可以通过不同的工作模式(模式0、模式1、模式2、模式3、模式4和模式5)来实现不同的计时和计数功能。定时器1的计数频率可以达到最大6MHz。
定时器的工作原理是:当定时器开始计时时,定时器计数器开始计数,计数值不断增加,当计数器的值达到指定的计数值时,定时器会发出一个中断信号。中断服务程序可以在定时器溢出时执行一些特定的操作.
将输入信号与三角波信号进行比较,可以生成PWM波形的原理基于比较器的输出。在这个过程中,输入信号被与一个参考电压进行比较,输出结果被称为比较器的输出。
具体来说,PWM信号的生成过程如下:
1.产生一个三角波信号,其频率应该足够高,以保证PWM信号的平滑度和精度。一般而言,三角波信号的频率应该在几千赫兹到几十千赫兹之间。
2.产生一个参考电压,该参考电压的大小与所需的占空比有关。例如,如果需要产生50%的占空比,则参考电压应该为输入信号幅值的一半。
3.将输入信号与参考电压进行比较。当输入信号的幅值高于参考电压时,比较器的输出为高电平;当输入信号的幅值低于参考电压时,比较器的输出为低电平。
4.将比较器的输出与三角波信号进行比较。当三角波信号的幅值高于比较器输出时,PWM信号为高电平;当三角波信号的幅值低于比较器输出时,PWM信号为低电平。
5.重复上述过程,即可生成所需占空比的PWM信号。
需要注意的是,实际应用中,需要对比较器的输出进行去抖动处理,以避免输出的瞬时变化引起的错误。去抖动的方法包括加入滤波器或使用斯密特触发器。
施密特触发器是一种具有滞回特性的触发器,常用于信号去噪、脉冲形变、数字信号处理等领域。其特点是在输入信号的上升沿或下降沿经过某一阈值后,输出信号会发生反转,从而产生一个宽度固定的矩形脉冲信号。
施密特触发器通常由一个比较器和一个正反馈电路组成。当输入信号的幅值高于一定的阈值时,比较器的输出将变为高电平,然后通过正反馈电路将输出信号反馈回比较器的非反相输入端。在此情况下,输入信号即使变得微弱,输出信号仍将保持高电平。只有当输入信号的幅值低于一定的阈值时,比较器的输出才会变为低电平,并将反馈信号反向,使得输出信号保持低电平。通过这种方式,施密特触发器可以实现信号的滞回特性,并且可以有效去除噪声干扰。
-
直流电机
+关注
关注
36文章
1709浏览量
70106 -
交流电机
+关注
关注
3文章
387浏览量
33605 -
FOC算法
+关注
关注
1文章
17浏览量
9657
发布评论请先 登录
相关推荐
怎么使用Matlab进行电机控制算法仿真?
必学的BLDC电机控制算法——FOC简述
FOC控制基础知识详解
foc电机控制算法的调试经验






 工商网监
工商网监
评论