 L6234无刷直流电机控制
L6234无刷直流电机控制
我本来今天想来一发源码分析的,但是我手头没有鼠标,我一想截图那么多就算了,我发一个电机驱动的代码就行。
[SimpleFoc-云台电机2804+AS5600]
[SimpleFoc-原理图(STL6234+INA240)]

所以一个输出要两个接口控制
L6234 驱动器有 3 个输出:OUT1、OUT2 和 OUT3。每个输出由 2 个引脚控制:输入 (IN) 和使能 (EN),例如 OUT1 由 IN1 和 EN1 控制。下图显示了每个半桥的控制逻辑:
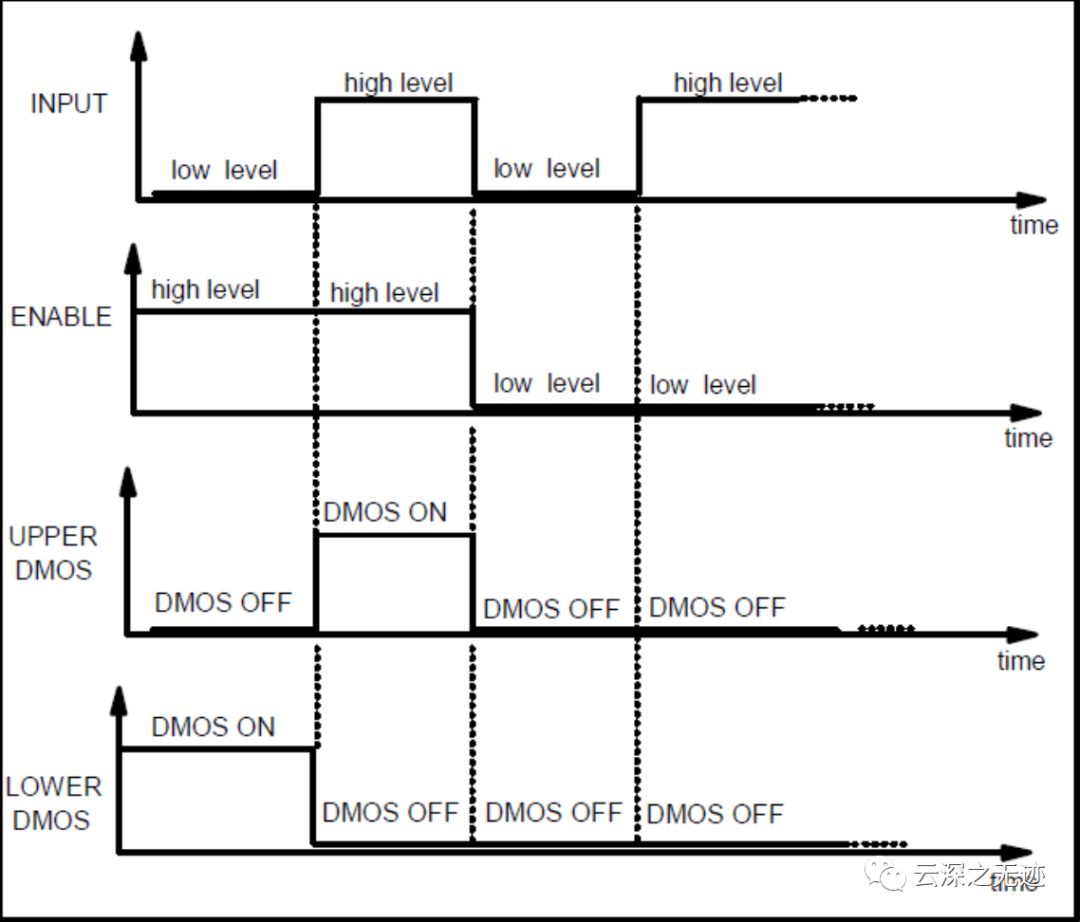
逻辑电平

输出电平
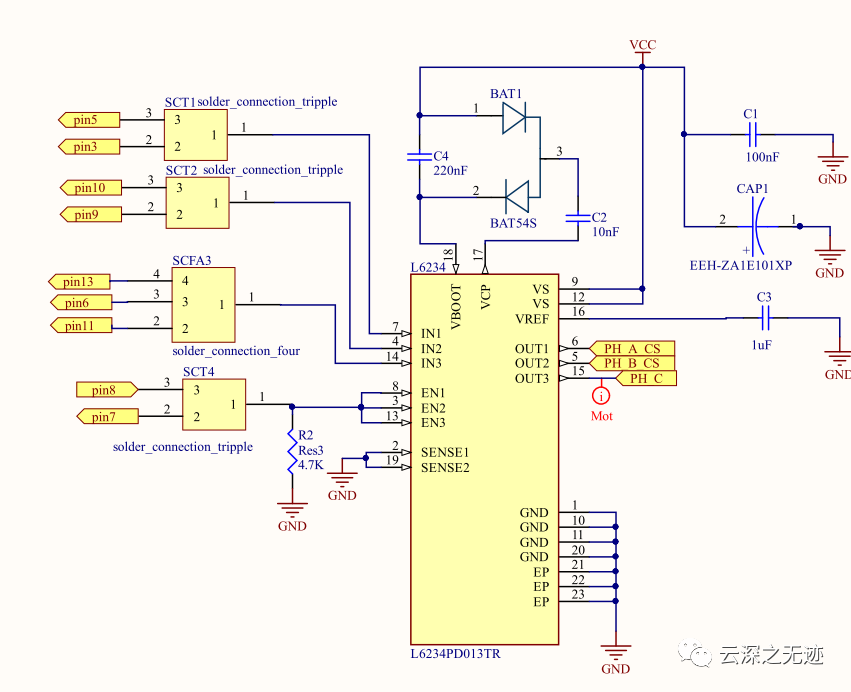
另外这个原理图看左边,为了方便可以把使能脚直接都拉低

这样使用三个引脚模拟也是可以的
1.L6234 三相电机驱动器
2.6 x 33k 欧姆电阻器
3.3 x 10k 欧姆电阻器
4.4 x 1 欧姆电阻器(功率为 2 W 或更高)
5.2 x 1N4148 二极管
6.100 uF 电解电容器(16V 或更高)
7.1 uF 电解电容器(16V 或更高)
8.220 nF (0.22 uF) 陶瓷电容器
9.100 nF (0.1 uF) 陶瓷电容器
10.10 nF (0.01 uF) 陶瓷电容器
11.2 x 按钮
12.12V 电源
#define SPEED_UP A0
#define SPEED_DOWN A1
#define PWM_MAX_DUTY 255
#define PWM_MIN_DUTY 50
#define PWM_START_DUTY 100
byte bldc_step = 0, motor_speed;
unsigned int i;
void setup()
{
DDRD |= 0x38; // Configure pins 3, 4 and 5 as outputs
PORTD = 0x00;
DDRB |= 0x0E; // Configure pins 9, 10 and 11 as outputs
PORTB = 0x31;
// Timer1 module setting: set clock source to clkI/O / 1 (no prescaling)
TCCR1A = 0;
TCCR1B = 0x01;
// Timer2 module setting: set clock source to clkI/O / 1 (no prescaling)
TCCR2A = 0;
TCCR2B = 0x01;
// Analog comparator setting
ACSR = 0x10; // Disable and clear (flag bit) analog comparator interrupt
pinMode(SPEED_UP, INPUT_PULLUP);
pinMode(SPEED_DOWN, INPUT_PULLUP);
}
// Analog comparator ISR
ISR(ANALOG_COMP_vect)
{
// BEMF debounce
for (i = 0; i < 10; i++)
{
if (bldc_step & 1)
{
if (!(ACSR & 0x20))
i -= 1;
}
else
{
if ((ACSR & 0x20))
i -= 1;
}
}
bldc_move();
bldc_step++;
bldc_step %= 6;
}
void bldc_move()
{ // BLDC motor commutation function switch(bldc_step){ case 0: AH_BL(); BEMF_C_RISING(); break; case 1: AH_CL(); BEMF_B_FALLING(); break; case 2: BH_CL(); BEMF_A_RISING(); break; case 3: BH_AL(); BEMF_C_FALLING(); break; case 4: CH_AL(); BEMF_B_RISING(); break; case 5: CH_BL(); BEMF_A_FALLING(); break; } } void loop() { SET_PWM_DUTY(PWM_START_DUTY); // Setup starting PWM with duty cycle = PWM_START_DUTY i = 5000; // Motor start while(i > 100) {
delayMicroseconds(i);
bldc_move();
bldc_step++;
bldc_step %= 6;
i = i - 20;
}
motor_speed = PWM_START_DUTY;
ACSR |= 0x08; // Enable analog comparator interrupt
while (1)
{
while (!(digitalRead(SPEED_UP)) && motor_speed < PWM_MAX_DUTY)
{
motor_speed++;
SET_PWM_DUTY(motor_speed);
delay(100);
}
while (!(digitalRead(SPEED_DOWN)) && motor_speed > PWM_MIN_DUTY)
{
motor_speed--;
SET_PWM_DUTY(motor_speed);
delay(100);
}
}
}
void BEMF_A_RISING()
{
ADCSRB = (0 << ACME); // Select AIN1 as comparator negative input
ACSR |= 0x03; // Set interrupt on rising edge
}
void BEMF_A_FALLING()
{
ADCSRB = (0 << ACME); // Select AIN1 as comparator negative input
ACSR &= ~0x01; // Set interrupt on falling edge
}
void BEMF_B_RISING()
{
ADCSRA = (0 << ADEN); // Disable the ADC module
ADCSRB = (1 << ACME);
ADMUX = 2; // Select analog channel 2 as comparator negative input
ACSR |= 0x03;
}
void BEMF_B_FALLING()
{
ADCSRA = (0 << ADEN); // Disable the ADC module
ADCSRB = (1 << ACME);
ADMUX = 2; // Select analog channel 2 as comparator negative input
ACSR &= ~0x01;
}
void BEMF_C_RISING()
{
ADCSRA = (0 << ADEN); // Disable the ADC module
ADCSRB = (1 << ACME);
ADMUX = 3; // Select analog channel 3 as comparator negative input
ACSR |= 0x03;
}
void BEMF_C_FALLING()
{
ADCSRA = (0 << ADEN); // Disable the ADC module
ADCSRB = (1 << ACME);
ADMUX = 3; // Select analog channel 3 as comparator negative input
ACSR &= ~0x01;
}
void AH_BL()
{
PORTB = 0x04;
PORTD &= ~0x18;
PORTD |= 0x20;
TCCR1A = 0; // Turn pin 11 (OC2A) PWM ON (pin 9 & pin 10 OFF)
TCCR2A = 0x81; //
}
void AH_CL()
{
PORTB = 0x02;
PORTD &= ~0x18;
PORTD |= 0x20;
TCCR1A = 0; // Turn pin 11 (OC2A) PWM ON (pin 9 & pin 10 OFF)
TCCR2A = 0x81; //
}
void BH_CL()
{
PORTB = 0x02;
PORTD &= ~0x28;
PORTD |= 0x10;
TCCR2A = 0; // Turn pin 10 (OC1B) PWM ON (pin 9 & pin 11 OFF)
TCCR1A = 0x21; //
}
void BH_AL()
{
PORTB = 0x08;
PORTD &= ~0x28;
PORTD |= 0x10;
TCCR2A = 0; // Turn pin 10 (OC1B) PWM ON (pin 9 & pin 11 OFF)
TCCR1A = 0x21; //
}
void CH_AL()
{
PORTB = 0x08;
PORTD &= ~0x30;
PORTD |= 0x08;
TCCR2A = 0; // Turn pin 9 (OC1A) PWM ON (pin 10 & pin 11 OFF)
TCCR1A = 0x81; //
}
void CH_BL()
{
PORTB = 0x04;
PORTD &= ~0x30;
PORTD |= 0x08;
TCCR2A = 0; // Turn pin 9 (OC1A) PWM ON (pin 10 & pin 11 OFF)
TCCR1A = 0x81; //
}
void SET_PWM_DUTY(byte duty)
{
if (duty < PWM_MIN_DUTY)
duty = PWM_MIN_DUTY;
if (duty > PWM_MAX_DUTY)
duty = PWM_MAX_DUTY;
OCR1A = duty; // Set pin 9 PWM duty cycle
OCR1B = duty; // Set pin 10 PWM duty cycle
OCR2A = duty; // Set pin 11 PWM duty cycle
}
代码我就先不解释了,看懂需要看ATmega的书手册
这个是ATmega的中文数据手册了:
链接:https://pan.baidu.com/s/13Bg6A6KGsjhuScStLKJt9Q 提取码:3lna
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电机驱动
+关注
关注
60文章
1218浏览量
86811 -
源码
+关注
关注
8文章
643浏览量
29267 -
代码
+关注
关注
30文章
4798浏览量
68714
发布评论请先 登录
相关推荐
基于Matlab/Simulink的无刷直流电机控制仿真研究
基于Matlab/Simulink的无刷直流电机控制仿真研究基于Matlab/Simulink的无刷
发表于 12-29 10:32
•0次下载

永磁无刷直流电机的控制方法
永磁无刷直流电机(BLDCM)因其高效率、高功率密度、低维护成本等优点,在电动汽车、航空航天、工业自动化等领域得到了广泛应用。为了充分发挥永磁无刷





 工商网监
工商网监
评论