 使用旭日X3派的BPU部署Yolov5
使用旭日X3派的BPU部署Yolov5
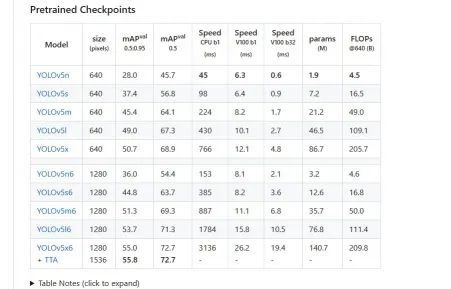
本次主要介绍在旭日x3的BPU中部署yolov5。首先在ubuntu20.04安装yolov5,并运行yolov5并使用pytoch的pt模型文件转ONNX;
然后将ONNX模型转换BPU模型;最后上板运行代码测试,并利用Cypython封装后处理代码。
一. 安装Anaconda
Anaconda 是一个用于科学计算的 Python 发行版,支持 Linux, Mac, Windows, 包含了众多流行的科学计算、数据分析的 Python 包。
a. 先去官方地址下载好对应的安装包
b.然后安装anaconda
bash ~/Downloads/Anaconda3-2023.03-Linux-x86_64.sh (bash ~/安装包位置/安装包名称)
全部选yes,anaconda会自动将环境变量添加到PATH里面,如果后面你发现输出conda提示没有该命令,那么你需要执行命令 source ~/.bashrc 更新环境变量,就可以正常使用了。
如果发现这样还是没用,那么需要添加环境变量。编辑~/.bashrc 文件,在最后面加上
export PATH=/home/
主机名称/anaconda3/bin:$PATH
注意:路径应改为自己机器上的路径
保存退出后执行:source ~/.bashrc 再次输入 conda list 测试看看,应该没有问题。
c.添加Aanaconda国内镜像配置
添加Aanaconda国内镜
conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/ conda config --add channels https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/main/ conda config --set show_channel_urls yes像配置
二. 安装pytorch,onnx
首先为pytorch创建一个anaconda虚拟环境,python=3.10,环境名字可自己确定,这里本人使用yolov5作为环境名:
conda create -n yolov5 python=3.10
进入创建的yolov5环境
conda activate yolov5
安装关键包ONNX
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple onnx
安装yolov5依赖的pytorch
pip install torch==1.11.0 torchvision==0.12.0 torchaudio==0.11.0
三. yolov5项目克隆和安装
1.克隆yolov5项目
git clone -b (下载指定版本或下载最新把-b去掉即可)https://github.com/ultralytics/yolov5.git
2.使用清华源安装所需库
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
3.下载与训练的权重文件
在https://pypi.tuna.tsinghua.edu.cn/simple 中找到下载版本的权重文件,并并放置在育yolov5文件夹下
4.安装测试
在yolov5路径下执行:python detect.py
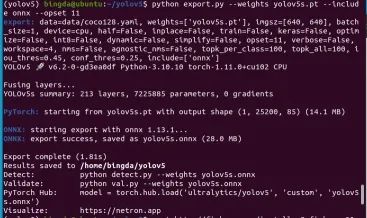
5.pytorch的pt模型文件转onnx
BPU的工具链没有支持onnx的所有版本的算子,即当前BPU支持onnx的opset版本为10和11,执行:
python export.py --weights yolov5s.pt --include onnx --opset 11
转换成功后,控制台显示如下log信息,转换模型造yolov5文件夹下
四. ONNX模型转换
安装docker
可以使用鱼香ros一键安装Docker,安装完成之后输入命令sudo docker pull
openexplorer/ai_toolchain_centos_7:v1.13.6,之后自动开始docker的安装。 配置天工开物 OpenExplorer
OpenExplorer工具包的下载,需要wget支持,在ubuntu中安装wget, sudo apt-get install wget ,
参考官网信息
https://developer.horizon.ai/forumDetail/136488103547258769,下载horizon_xj3_open_explorer
CPU Docker:
wget-c ftp://vrftp.horizon.ai/Open_Explorer_gcc_9.3.0/2.5.2/docker_openexplorer_ubuntu_20_xj3_cpu_v2.5.2_py38.tar.gz
启动docker
这一部分文件我参考
https://blog.csdn.net/Zhaoxi_Li/article/details/125516265
天工开物OpenExplorer根目录:
我的环境下是
"/home/bingda/dd/horizon_xj3_openexplorer_v2.5.2_py38_doc"记得加双引号防止出现空格,该目录要挂载在docker中/open_explorer的目录下:
sudo docker run -it --rm -v "/home/bingda/dd/horizon_xj3_openexplorer_v2.5.2_py38_doc":/open_explorer -v "home/bingda/dd/Codes":/data/horizon_x3/codes openexplorer/ai_toolchain_centos_7:v1.13.6
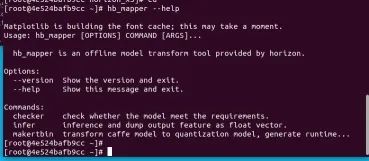
已经成功通过Docker镜像进入了完整的工具链开发环境。
可以键入 hb_mapper --help命令验证下是否可以正常得到帮助信息。其中hb_mapper --help是工具链的一个常用工具。
创建一个文件(我这里角yolo)中,,把前面转好的yolov5s.onnx放进这个文件夹里,输入:
sudo docker run -it --rm -v "/home/bingda/dd/yolo":/bpucodes openexplorer/ai_toolchain_centos_7:v1.13.6 在docker中,进入bpucodes
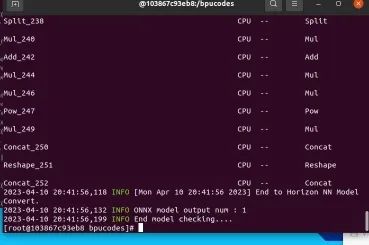
模型检查
文件夹,开始我们的模型转换。输入指令hb_mapper checker --model-type onnx --march bernoulli2 --model yolov5s.onnx,
开始检查模型,显示如下内容表示模型检查通过。
校准数据参考以下的yolov3校准代码:
https://blog.csdn.net/Zhaoxi_Li/article/details/125516265
输入prepare_calibration_data.py可以得到校准数据。
# 修改输入图像大小为640x640# img = imequalresize(img, (640, 640)) # 指定输出的校准图像根目录 dst_root = '/data/horizon_x3/codes/yolov5/bpucodes/calibration_data
开始转换BPU模型
输入命令hb_mapper makertbin --config convert_yolov5s.yaml --model-type onnx
开始转换我们的模型。校准过后会输出每一层的量化损失,转换成功后,得到model_output/yolov5s.bin,这个文件拿出来,拷贝到旭日X3派上使用,它也是我们上板运行所需要的模型文件。
五. 上板运行
文件准备
下载百度云的文件,拷贝到旭日X3派开发板中,其中yolov5s.bin就是我们转换后的模型,coco_classes.names仅用在画框的时候,如果用自己的数据集的话,参考coco_classes.names创建个新的名字文件即可。
输入sudo apt-get install libopencv-dev安装opencv库,之后进入代码根目录,输入python3 setup.py build_ext --inplace,编译后处理代码,得到lib/pyyolotools.cpython-38-aarch64-linux-gnu.so文件。
运行推理代码
模型推理的代码可参考https://blog.csdn.net/Zhaoxi_Li/article/details/126651890,其中yolotools.pypostprocess_yolov5为C++实现的后处理功能。
这里补充旭日x3通过opencv调用摄像头,对每个图像进行实时处理
import numpy as np
import cv2
import os
from hobot_dnn import pyeasy_dnn as dnn
from bputools.format_convert import imequalresize, bgr2nv12_opencv
import lib.pyyolotools as yolotools
def get_hw(pro):
if pro.layout == "NCHW":
return pro.shape[2], pro.shape[3]
else:
return pro.shape[1], pro.shape[2]
def format_yolov5(frame):
row, col, _ = frame.shape
_max = max(col, row)
result = np.zeros((_max, _max, 3), np.uint8)
result[0:row, 0:col] = frame
return result
# # img_path 图像完整路径
# img_path = '20220904134315.jpg'
# model_path 量化模型完整路径
model_path = 'yolov5s.bin'
# 类别名文件
classes_name_path = 'coco_classes.names'
# 设置参数
thre_confidence = 0.4
thre_score = 0.25
thre_nms = 0.45
# 框颜色设置
colors = [(255, 255, 0), (0, 255, 0), (0, 255, 255), (255, 0, 0)]
#利用opencv读取摄像头,对每个图像进行实时处理
cap = cv2.VideoCapture(0)
i = 0
while (1):
ret, imgOri = cap.read()
# 1. 加载模型,获取所需输出HW
models = dnn.load(model_path)
model_h, model_w = get_hw(models[0].inputs[0].properties)
print(model_h, model_w)
# 2 加载图像,根据前面模型,转换后的模型是以NV12作为输入的
# 但在OE验证的时候,需要将图像再由NV12转为YUV444
inputImage = format_yolov5(imgOri)
img = imequalresize(inputImage, (model_w, model_h))
nv12 = bgr2nv12_opencv(img)
# 3 模型推理
t1 = cv2.getTickCount()
outputs = models[0].forward(nv12)
t2 = cv2.getTickCount()
outputs = outputs[0].buffer # 25200x85x1
print('time consumption {0} ms'.format((t2-t1)*1000/cv2.getTickFrequency()))
# 4 后处理
image_width, image_height, _ = inputImage.shape
fx, fy = image_width / model_w, image_height / model_h
t1 = cv2.getTickCount()
class_ids, confidences, boxes = yolotools.pypostprocess_yolov5(outputs[0][:, :, 0], fx, fy,
thre_confidence, thre_score, thre_nms)
t2 = cv2.getTickCount()
print('post consumption {0} ms'.format((t2-t1)*1000/cv2.getTickFrequency()))
# 5 绘制检测框
with open(classes_name_path, "r") as f:
class_list = [cname.strip() for cname in f.readlines()]
t1 = cv2.getTickCount()
for (classid, confidence, box) in zip(class_ids, confidences, boxes):
color = colors[int(classid) % len(colors)]
cv2.rectangle(imgOri, box, color, 2)
cv2.rectangle(imgOri, (box[0], box[1] - 20), (box[0] + box[2], box[1]), color, -1)
cv2.putText(imgOri, class_list[classid], (box[0], box[1] - 10), cv2.FONT_HERSHEY_SIMPLEX, .5, (0,0,0))
t2 = cv2.getTickCount()
print('draw rect consumption {0} ms'.format((t2-t1)*1000/cv2.getTickFrequency()))
# print('draw rect consumption {0} inputImage = format_yolov5(imgOri)')
img = imequalresize(inputImage, (model_w, model_h))
nv12 = bgr2nv12_opencv(img)
k = cv2.waitKey(1)
if k == 27: # 按下ESC退出窗口
break
elif k == ord('s'): # 按下s保存图片
cv2.imwrite('./' + str(i) + '.jpg', imgOri)
i += 1
cv2.imshow("capture", imgOri)
cap.release()
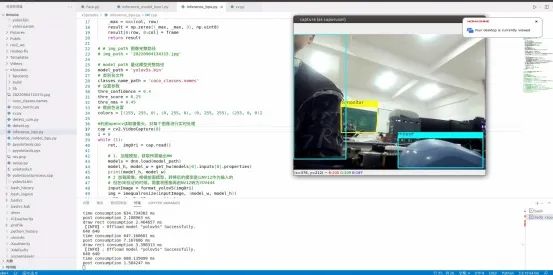
输入sudo python3 inference_bpu.py,效果演示如下图
六. 利用Cython封装后处理代码
①写后处理的C++代码
首先,创建头文件yolotools.h,用来记录函数声明,方便其他代码调用。
因为Cython调用时,调用C++的一些类并不方便,所以写成C语言接口更方便调用。后处理的函数名为postprocess_yolov5,创建 yolov5postprocess.cpp来对后处理函数进行实现。
②写Cython所需的Pyx文件
同级目录下创建pyyolotools.pyx,切记文件名不要跟某个CPP重复了,因为cython会将pyyolotools.pyx转为pyyolotools.cpp,如果有重复的话可能会导致文件被覆盖掉。
③写编译Pyx所需的python代码
创建setup.py文件,将下面代码放进去,配置好opencv的头文件目录、库目录、以及所需的库文件。
在Extension中配置封装的函数所依赖的文件,然后在控制台输入python3 setup.py build_ext --inplace即 。
审核编辑:汤梓红
-
Linux
+关注
关注
87文章
11383浏览量
211576 -
Ubuntu
+关注
关注
5文章
572浏览量
30371 -
模型
+关注
关注
1文章
3430浏览量
49542 -
python
+关注
关注
56文章
4815浏览量
85393 -
镜像
+关注
关注
0文章
174浏览量
10895
原文标题:使用旭日X3派的BPU部署Yolov5
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【地平线旭日X3派试用体验】开箱篇硬件介绍
【 地平线旭日X3派试用体验】01. X3派开箱及上手
#旭日X3派首百尝鲜# 用solidworks画了一个旭日X3派的模型
【 地平线旭日X3派试用体验】地平线旭日X3派AGV智能车设计

旭日X3派首百尝鲜 | 借助旭日X3派玩转智能家居

旭日X3派BPU部署教程系列之带你轻松走出模型部署新手村

旭日X3派BPU部署教程系列之手把手带你成功部署YOLOv5

当旭日X3派遇上ChatGPT,我们能「chat」什么





 工商网监
工商网监
评论