 精密运动控制平台
精密运动控制平台
一、产品概述
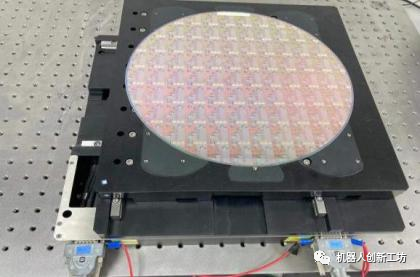
精密运动控制平台以典型运动机构做为控制对像,应用自有模型化控制算法开发环境,搭配多路多信号IO板卡做为电量采集手段,高性能功放实现功率驱动,为高精密运动控制系统开发人员、研学人员,提供一套完整的算法验证平台。在该本台上可以跳过基础编码器采集、驱动软件开发等工作,直接验证高级控制算法。由于软变量全开放性,硬件系统自研,所以可以为算法开发人员提供有力的支撑。
二、产品特色
1、开发环境友好,基于MATLAB/Simulink开发调制控制算法;2、融合轨迹生成与插补模块,测试、加入迭代学习和轨迹输入整形算法与光刻HIL模型算法融合,实现同平台的模型仿真与实物控制;3、具有丰富的接口板卡资源,可以方便的与激光干涉仪、跟踪仪、涡流传感器等反馈设备连接;
4、具有EtherCAT、CANOPEN、ProfiNet等工业现场总线的扩展能力;
5、被控对像可扩展性强,可以是伺服电机、多自由度高精度XYR运动平台、尺蠖式压电致动器等;
三、系统性能参数
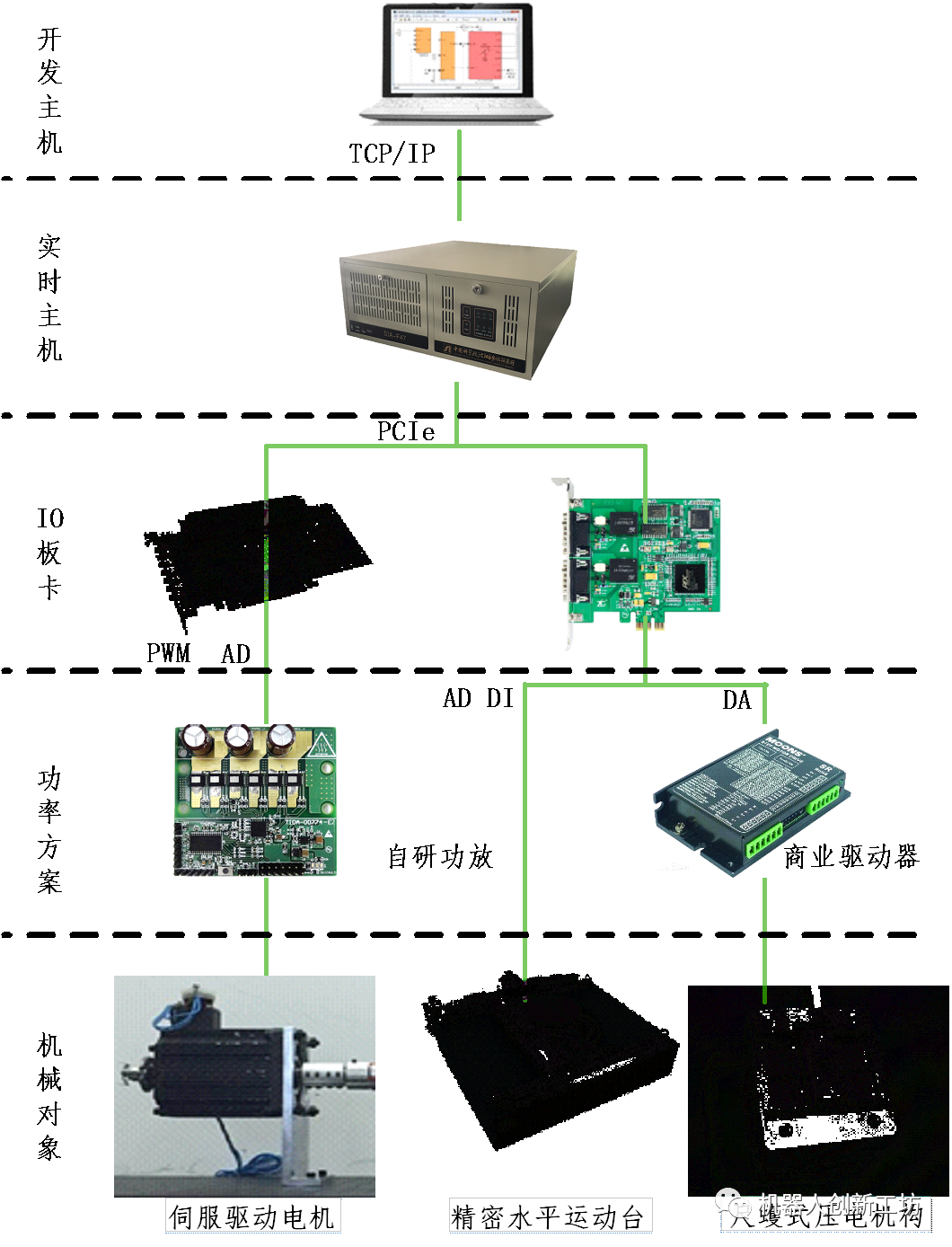
精密运动控制平台由上位开发机、实时控制主机、FPGA IO板卡、自研功率放大模块、商业驱动器和精密平面运动平台组成。
1、FGPA IO板卡:FMCIO采集卡是集AD、DA、PWM控制、差分输入输出等多功能为一体的板卡,针对每个功能,采集卡设计了多通道同步采集机制。具体接口列表如图:
|
支持接口 |
描述 |
|
AD接口 |
16路AD接口,分辨率16bit,200Ksps同步采样,输入范围±10V |
|
DA接口 |
2路DA接口,分辨率16bit,输出范围±10V |
|
差分信号输入接口 |
12路,光耦隔离保护,可用作增量编码器接口 |
|
差分信号输入输出接口 |
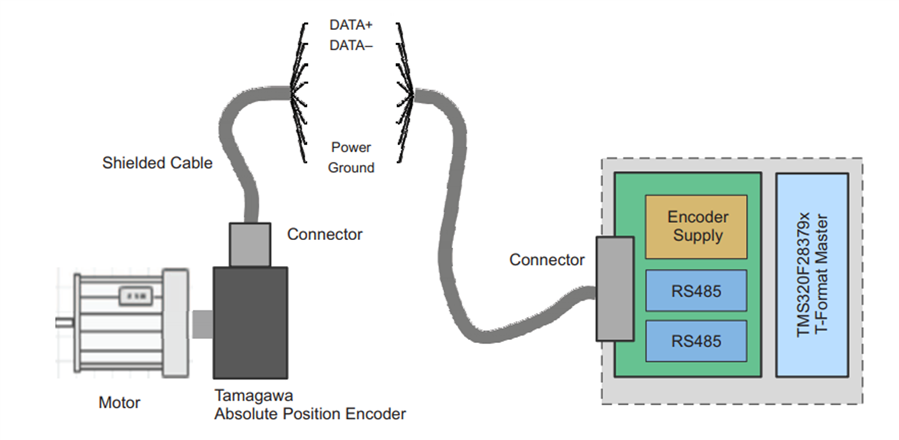
6路,可编程方向,可用作绝对值编码器数据接口,支持SSI、BISS、Endat和多摩川编码器。 |
|
差分信号输出接口 |
6路,可用作绝对值编码器时钟接口,支持SSI、BISS、Endat等编码器。 |
|
PWM驱动输出 |
6路PWM输出(A/B),具有软硬件保护功能 |
2、软件系统:
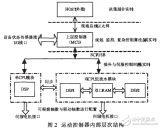
系统主架构图如下图所示:
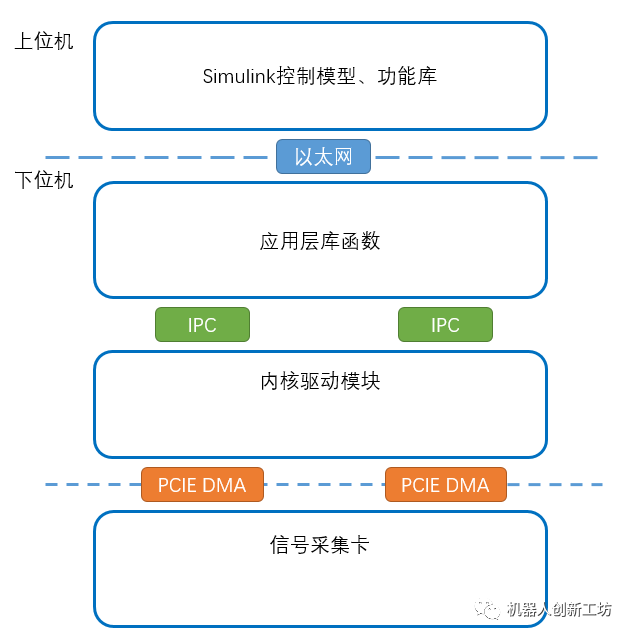
主机系统架构图
如上图所示,主机系统架构主要包括信号采集板卡,下位机内部包含内核驱动模块和应用层库函数,上位机中包括Matlab软件本身及封装好的Simulink功能模块库。信号采集卡通过PCIE通信协议与内核驱动模块通信,内核驱动模块通过IPC通信与应用层程序通信。本设计中,内核驱动模块与应用层通信的功能以应用层函数库的形式被封装,该函数库的调用又被进一步封装到Simulink功能模块库中。
下位机启动时会自动挂载内核驱动模块等待调用。在Simulink模型编译时,会包含该功能模块库功能一起生成下位机应用层可执行文件。Simulink模型运行时会自动运行该可执行文件,该可执行文件会启动信号采集卡响应信号采集功能。
算法开发方式:
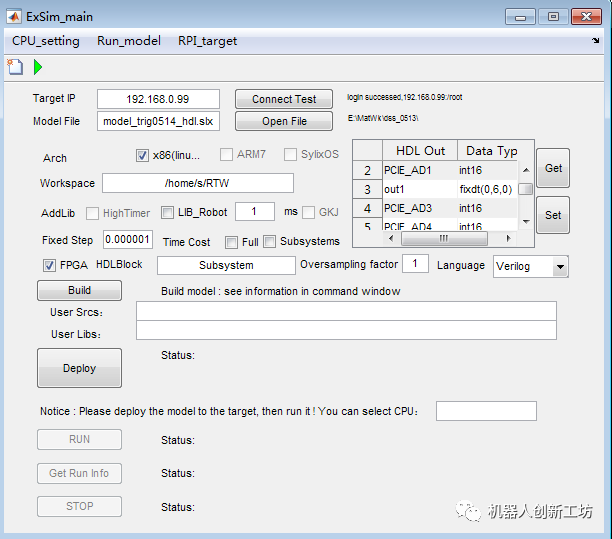
基于自研的功率级电机控制策略快速验证解决方案,用户在可以在Simulink界面环境下调用电力电子专用模型库和软件开发工具包(SDK)搭建实际硬件拓扑结构,并快速建立控制算法模型,对控制器的输入输出进行仿真,控制实际功率器件驱动实际电机,快速验证控制方案的可行性。应用范围灵活地涵盖各功率等级的多类电机控制器研发测试。
l支持x86目标机部署
l支持可选异构部署
l支持输出数据类型重配置
l开发者源文件链接
lFPGA参数设置功能
lHIL自定义Simulink库
l开发者自定义功能
3、精密平面运动平台
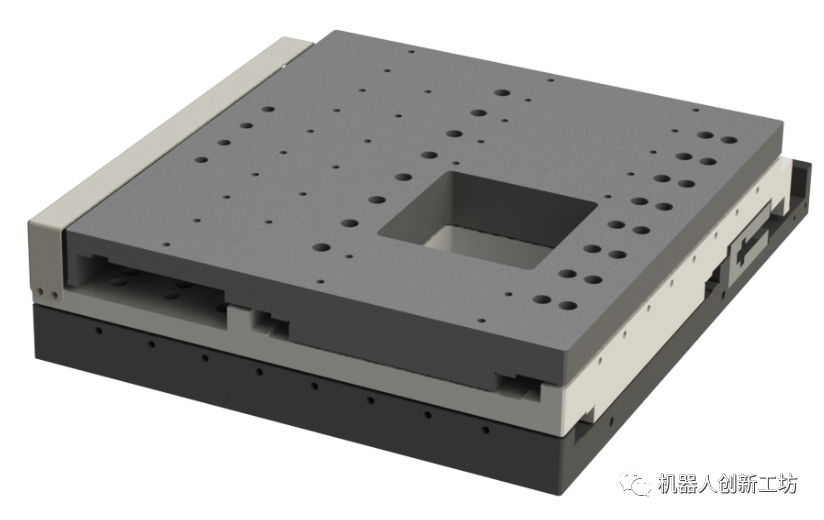
精密平面运动平台超薄型设计,集成了X轴和Y轴,拥有优异的定位精度、平面度、直线度、刚性和重复性精度。该台子可定制,包括行程、反馈精度、驱动电机等参数,都可根据用户需求进行调整。
l集成XY平台,正交性设计
l全局平面度、直线度达微米级
l超薄型设计
l高效率,无齿槽力电机设计
l模拟光栅,最高可实现1.2纳米分辨率
|
精密平面运动平台XY台-XY100 |
||||
|
运动轴 |
X |
Y |
Unit |
Remark |
|
行程 |
200 |
200 |
mm |
|
|
速度 |
300 |
300 |
mm/s |
|
|
加速度 |
3 |
3 |
g |
Onlyloadofaxis |
|
最小步距 |
1 |
1 |
μm |
|
|
定位性能 |
0.03 |
0.03 |
μm |
|
|
双向重复定位精度 |
0.25 |
0.25 |
μm |
|
|
平面度 |
2.0 |
2.0 |
μm |
|
|
直线度 |
2.0 |
2.0 |
μm |
|
|
俯仰/pitch |
40 |
40 |
μrad |
|
|
偏摆/yaw |
40 |
40 |
μrad |
|
|
横滚/roll |
40 |
40 |
μrad |
|
|
正交性/Orthogonality |
50.00 |
50.00 |
μrad |
|
|
传感器 |
||||
|
类型 |
增量式光栅尺 |
Optical,directmeasuring |
||
|
分辨率 |
20 |
20 |
nm |
typ.(最小0.001.2nm) |
|
轴的驱动负载 |
3.3 |
6.2 |
Kg |
|
|
平台质量 |
11 |
Kg |
||
|
机械尺寸 |
285X241X64 |
mm*mm*mm |
||
|
驱动类型 |
||||
|
电机类型 |
Tecnotion无铁芯电机 |
|||
|
峰值力 |
100 |
200 |
N |
max. |
|
连续力 |
22.29 |
44.58 |
N |
|
|
电机/传感器 |
2×Sub-D,15-pin |
|||
四、实验结果

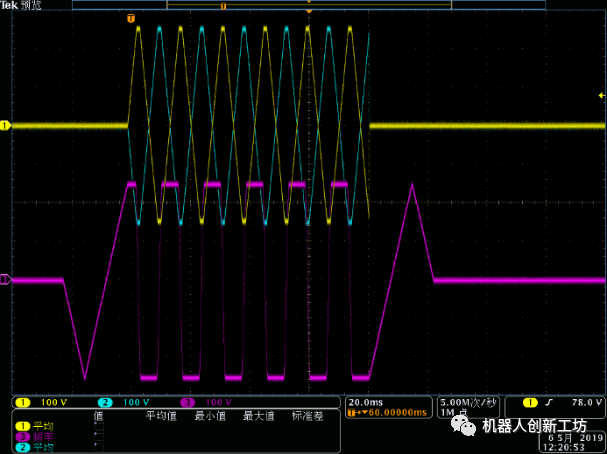
控制器及X-Y200运动台 尺蠖式驱动模型驱动电压波形
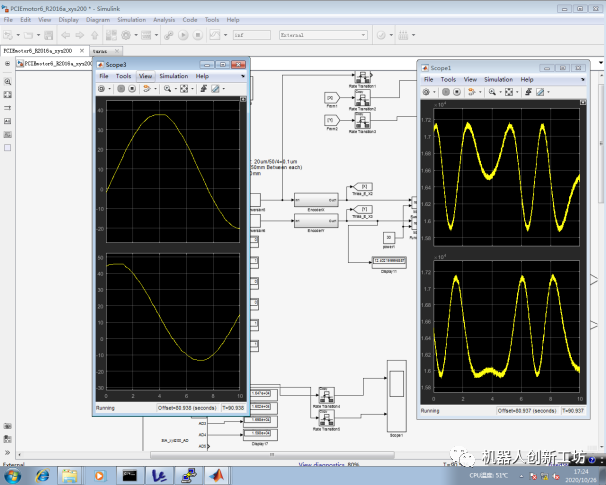
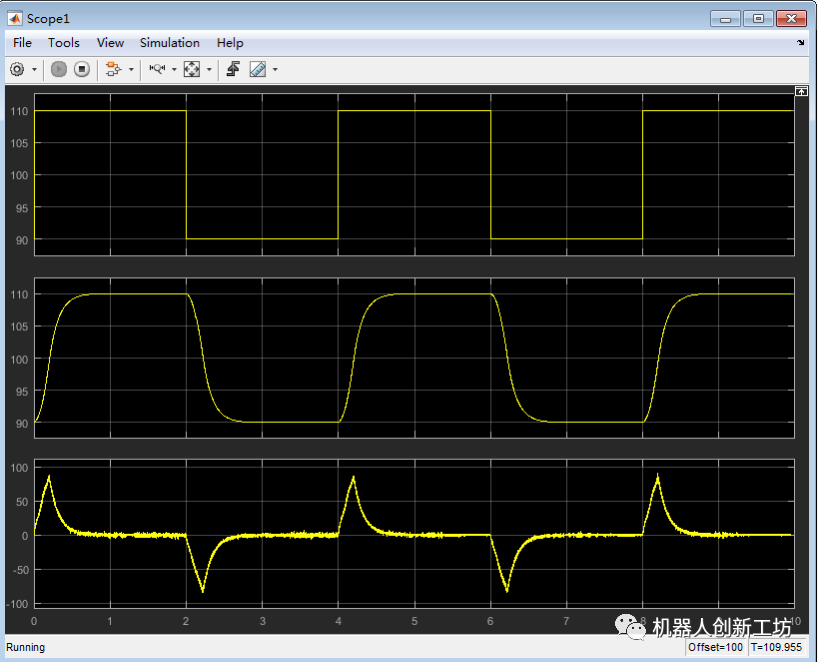
XY平台双轴位置轨迹及单电机电流波形 伺服电机位置跟踪及速度波形
审核编辑 :李倩
-
模块
+关注
关注
7文章
2714浏览量
47501 -
运动控制
+关注
关注
4文章
581浏览量
32873 -
FGPA
+关注
关注
1文章
24浏览量
16029
原文标题:精密运动控制平台
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐








 工商网监
工商网监
评论