 西门子S7-1200 PLC定位控制-程序
西门子S7-1200 PLC定位控制-程序
使用博途组态向导,建立定位的工艺对象后,利用定位相关指令,即可进行相关操作,相关指令轴启用,回原点,点动,绝对定位,相对定位,复位,暂停等。
1.轴启用MC_POWER
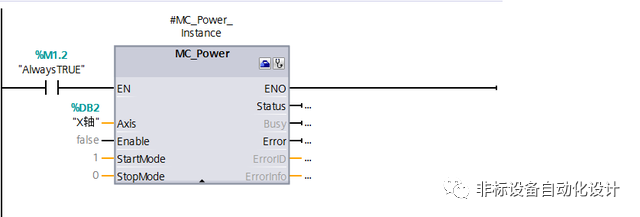
轴启动指令
Axis,指定启动轴,调用工艺对象配置的定位轴。
Enable,启用轴使能;当信号ON时,在工艺配置中指定的伺服使能输出自动ON。
StartMode,StopMode使用默认模式即可。
Status,轴启用的状态,ON为OK,OFF出现错误
Error,当轴启用错误时,信号输出
2.伺服回原点,MC_Home
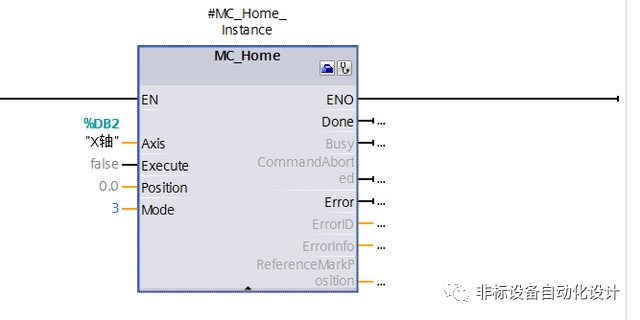
回原点指令
Execute,输入信号ON时,启用回原点,信号仅上升沿有效。
Done,回原点完成信号,定位完成输出上升沿信号,使用SET指令保持信号。
或启用回原点时,Execute信号一直为ON,直至DONE有信号。
Position,伺服回原点后,偏移多少定义为原地位置,默认为0.0。
Mode,回原点模式,改用3#模式。
Error,回原点过程中出现错误时,信号为ON。
3.点动JOG,MC_Movejog
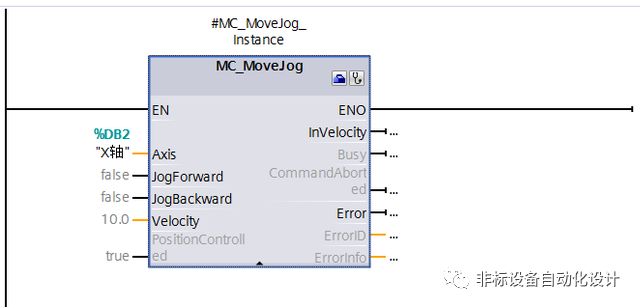
JOG指令
JogForward,电机正转,信号ON时启用,OFF时停止运行。
JogBackward,电机反正,信号ON时启用,OFF时停止运行。
JogForward与JogBackward不可以同时使用。
Velocity,指定伺服JOG运行速度。
Error,点动出现错误时,信号为ON。
4.绝对定位,MC_MoveAbsolute
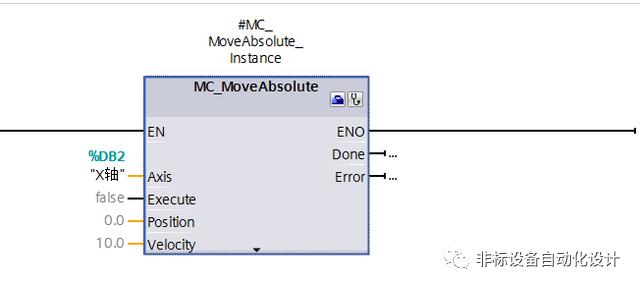
绝对定位指令
Execute,输入信号ON时,启用绝对定位,信号仅上升沿有效。
Done,定位完成信号,定位完成输出上升沿信号,使用SET指令保持信号。
或启用定位时,Execute信号一直为ON,直至DONE有信号。
Position,指定绝对定位的目标位置。
Velocity,指定绝对定位运行速度。
Error,绝对定位错误时,信号为ON。
5.伺服暂停,MC_Halt。
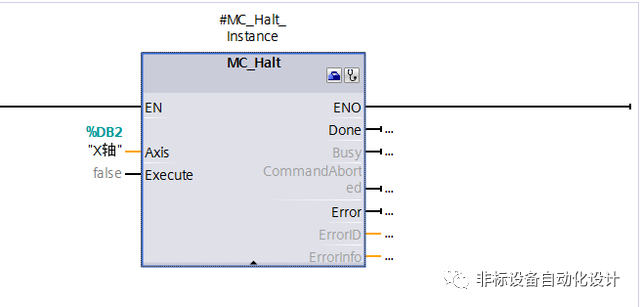
伺服暂停
Execute,输入信号ON时,启用伺服暂停,启用时,伺服定位指令必须断开。
Done,伺服暂停OK时,输出信号为ON。
Error,伺服暂停错误时,信号为ON。
6.伺服复位,MC_Reset。
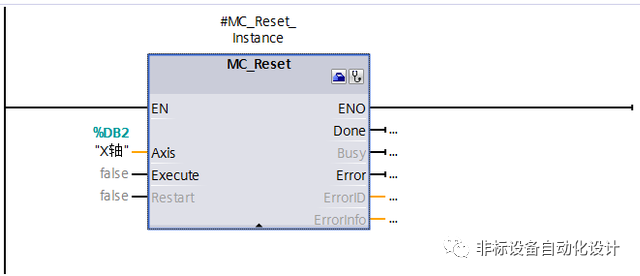
伺服复位
当调用伺服相关指令出现错误时,需要使用伺服复位指令,解除报警。
Execute,输入信号ON时,启用伺服复位,启用时,伺服定位指令需断开。
Done,伺服复位解除报警OK时,输出信号为ON。
Error,伺服报警解除出现错误时,信号为ON。
伺服定位相关指令的详细内容,可以查看手册了解。
审核编辑:汤梓红
-
plc
+关注
关注
5010文章
13262浏览量
462906 -
西门子
+关注
关注
94文章
3031浏览量
115767 -
程序
+关注
关注
117文章
3782浏览量
80990 -
输入信号
+关注
关注
0文章
452浏览量
12545 -
S7-1200
+关注
关注
11文章
331浏览量
17956
原文标题:西门子S7-1200 PLC定位控制-程序
文章出处:【微信号:非标设备自动化设计,微信公众号:非标设备自动化设计】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
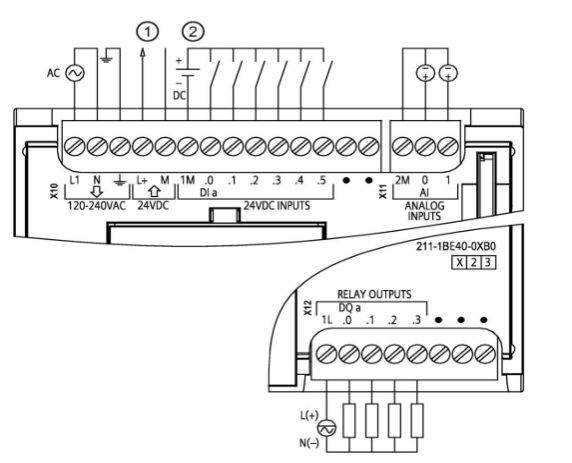
西门子S7-1200系列PLC输入/输出接线







 工商网监
工商网监
评论