 全面解析机器视觉工业缺陷检测(光源,相机,镜头,算法)
全面解析机器视觉工业缺陷检测(光源,相机,镜头,算法)

一般机器视觉系统:相机、镜头、光源、运动系统。
视觉工业检测大体分为工件尺寸测量与定位,和表面缺陷检测,及各种Logo标识的检测与识别等。
尺寸测量主要是检测物体的长、宽、高,比较常见主要是物体的二维尺寸(宽和高)检测。
表面缺陷检测主要是物体表面局部物理或者化学性质不均匀的区域,比较常见的有金属或者塑料制品表面的划痕(如:手机壳/屏幕表面的划痕)、斑点和孔洞(如:PCB板漏了焊点或者表面多了焊点),纸张表面的色差、脏污点、破损,纸制品表面的压痕、凸起,玻璃等非金属制品表面的杂质、破损、污点、平整度等。
Logo标识的检测与识别,主要是Logo标识印刷是否正确、是否完整。
视觉检测系统基本组成主要包括图像的获取、图像的处理分析、数据管理及人机交互(也有的分为相机、光源、镜头、图像采集卡、视觉处理系统等五个部分)。其中图像的获取模块,硬件部分主要包括照明光源、相机、镜头、图像采集卡等。图像的处理分析,软件算法部分主要包括图像的预处理与检测处理,预处理对图像数据进行加工,使我们需要的图像特征更加明显;检测处理是根据图像特征对损伤、尺寸进行检测。数据管理及人机交互,对于检测到的物体是否合格,以及去向根据实际需要做相应的处理。
一、硬件选型
1、光源的选择
光源是基础,打光是艺术。一个好的打光效果,基本决定了视觉检测成功的一大半。
光源的合理性选择,直接影响了输入图像数据的质量与应用效果。针对每个不同的应用案例与环境,需要选择相应的光源与合理的照明方式,以求达到最好的应用效果。
(1)光源可分为可见光和不可见光。
常用的几种可见光源有LED灯、萤光灯、卤素灯(光纤光源)、特殊光源。
LED 灯:
• 使用寿命约10000-30000小时。
• 可以使用多个LED达到高亮度,同时可组合不同的形状;
• 响应速度快,波长可以根据用途选择,制成不同的颜色。
萤光灯:
• 使用寿命大约1500-3000小时;
• 优点:扩散性好、适合大面积均匀照射;
• 缺点:响应速度慢,亮度较暗。
光纤卤素灯:
• 使用寿命大约1000小时;
• 优点:亮度高;
• 缺点:响应速度慢,几乎没有光亮度和色温的变化。
(2)按照射方式不同可分为背向照明、前向照明、结构光和频闪光照明等。
背向照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像,图像效果为黑白分明的被测物轮廓,常用于尺寸测量;
前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装,主要用于检测物体表面的重要细节特征、缺陷和划痕。
结构光照明是将光栅或线光源等投射到被测物上,根据它们产生的畸变,解调出被测物的三维信息。
频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。
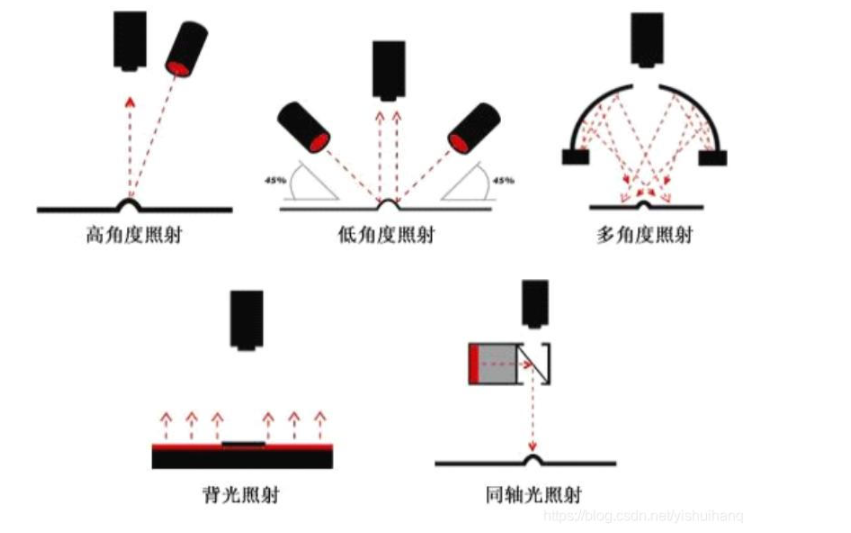
(3)按照照明方式可分为穹形光源、环形光源、平行光源、同轴光源、点光源、低角度光源、线光源、光栅等。
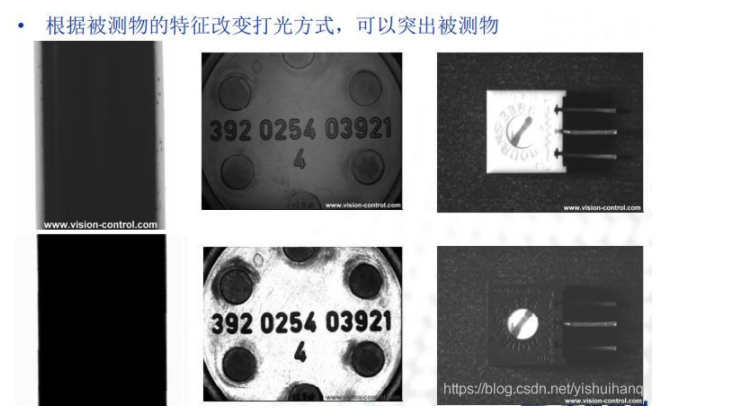
选择光源的角度:根据期望的图像效果,选择不同入射角度的光源。
穹形光源,主要用于球型或曲面物体的缺陷检测、不平坦的光滑表面字符的检测、金属或镜面的表面检测。如玻璃瓶、滚珠、小工件表面、塑料或铝制容器等。
环形光照射,多用于集成电路料带与管脚字符、金属工件刻印字符、光滑表面划痕、瓶口尺寸或裂痕、平面工件表面质量检测。
条形光源(可控照明,红色,蓝色,绿色单色光源)也叫条形灯是一种从侧面打光的照明光源,常用的角度是45度,也有更小的角度。侧光灯可以避免正面照射产生的强烈反光,同时还可以对边缘部分实现高亮的照明。是一种在尺寸测量、外观检测方面应用非常广泛的一种照明方式。常用于:LCD缺陷的检测、包装文字检测、包装膜破损检测、纸张质量检测、常规印刷质量检测、制造物裂纹的检测、电子部件的形状识别和大小的测量、各种线阵检测等。
同轴光照射,图像效果为明亮背景上的黑色特征,用于反光厉害的平面物体检测,能够加强有差异角度的表面特征,增强表面纹理(划痕、凹陷、压印),减少阴影。如金属、玻璃等光洁表面的划痕和瑕疵检测,芯片和硅片的破损检测、金属件上的冲压字符检测、线路板焊点与符号、集成电路的管脚字符检测等。
高角度照射,图像整体较亮,适合表面不反光物体;
低角度照射,图像背景为黑,特征为白,可以突出被测物轮廓及表面凹凸变化;
多角度照射,图像整体效果较柔和,适合曲面物体检测;
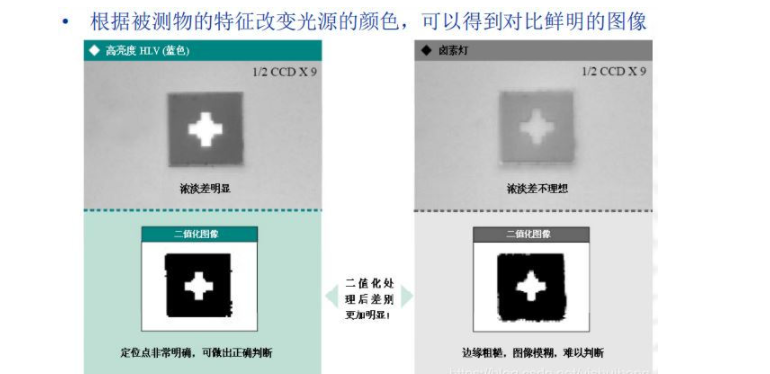
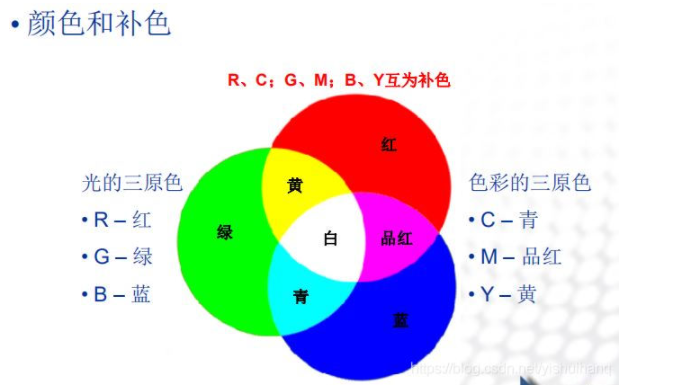
(a)考虑光源颜色和背景颜色:
使用与被测物同色系的光会使图像变亮(如:红光使红色物体更亮);使用与被测物相反色系的光会使图像变暗(如:红光使蓝色物体更暗、用蓝光照射黄色物体,呈现黑色)。
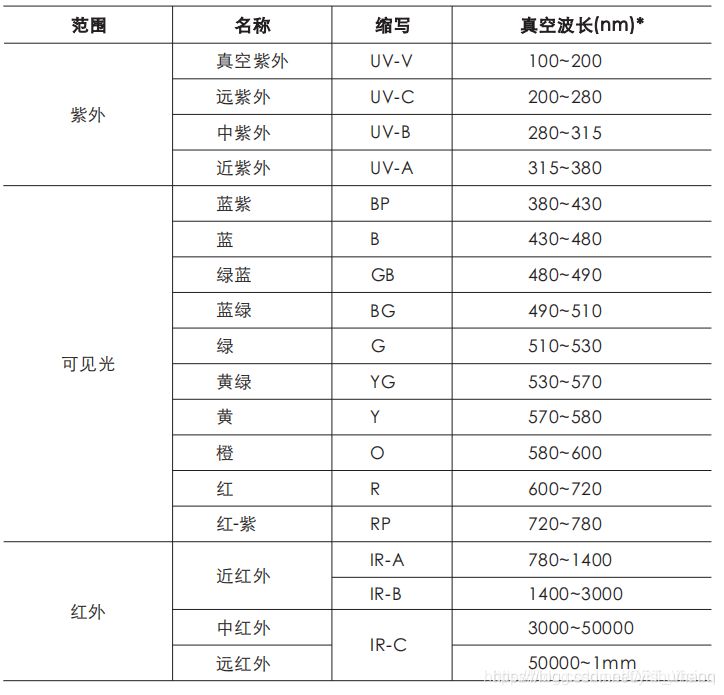
波长越长,穿透能力越强;波长越短,扩散能力越强。红外的穿透能力强,适合检测透光性差的物体,如棕色口服液杂质检测。紫外对表面的细微特征敏感,适合检测对比不够明显的地方,如食用油瓶上的文字检测。
(b)选择光源的形状和尺寸:
主要分为圆形、方形和条形。通常情况下选用与被测物体形状相同的光源,最终光源形状以测试效果为准。光源的尺寸选择,要求保障整个视野内光线均匀,略大于视野比较好。
(c)选择是否用漫射光源:
如被测物体表面反光,最好选用漫反射光源。多角度的漫射照明使得被测物表面整体亮度均匀,图像背景柔和,检测特征不受背景干扰。

A、如何评价一个光源的好坏?
1) 对比度
对比度对机器视觉来说非常重要。机器视觉应用的照明的最重要的任务就
是使需要被观察的特征与需要被忽略的图像特征之间产生最大的对比度,从而易
于特征的区分。对比度定义为在特征与其周围的区域之间有足够的灰度量区别。
好的照明应该能够保证需要检测的特征突出于其他背景。
2) 鲁棒性
鲁棒性就是对环境有一个好的适应。好的光源需要在实际工作中与其在实
验室中的有相同的效果 。
3) 亮度
当选择两种光源的时候,最佳的选择是选择更亮的那个。光源的亮度不够,
必然要加大光圈,从而减小了景深 。
4) 均匀性
均匀性是光源一个很中要的技术参数。均匀性好的光源使系统工作稳定 。
5) 可维护性
可维护性主要指光源易于安装,易于更换 。
6) 寿命及发热量
光源的亮度不易衰减过快,这样会影响系统的稳定,增加维护的成本 。发
热量大的灯亮度衰减快,光源的寿命也会受到很大影响。
B、如何依靠光源增强图像对比度?
使用相同颜色的光或相近颜色的光源照射可以使被照射部分变亮;
使用相反颜色的光或相近颜色的光源照射可以使被照射部分变暗。
不同的波长,对物质的穿透力(穿透率)不同,波长越长,对物体的穿透力
愈强,波长越短,对物质表面的扩散率愈大。
C、选光源的一些技巧
� 需要前景与背景更大的对比度,可以考虑用黑白相机与彩色光源
� 环境光的问题,尝试用单色光源,配一个滤镜
� 闪光曲面,考虑用散射圆顶光
� 闪光,平的,但粗糙的表面,尝试用同轴散射光
� 看表面的形状,考虑用暗视场(低角度) � 检测塑料的时候,尝试用紫外或红外光
� 需要通过反射的表面看特征,尝试用低角度线光源(暗视场) � 单个光源不能有效解决问题时考虑用组合光源
� 频闪能够产生比常亮照明 20 倍强的光
几种常用的打光实例:
颜色与补色5

明暗视野6

明暗视野7
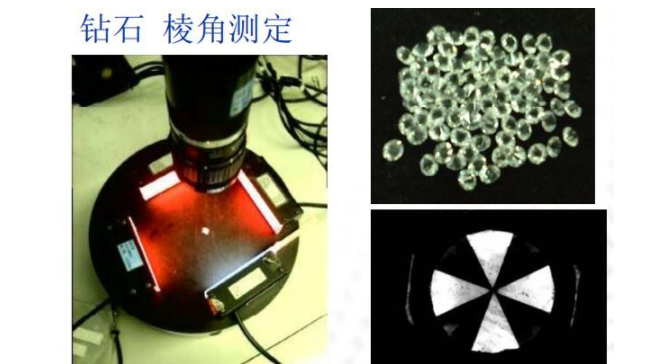
明暗视野8
选择光源的前提
可见光与近不可见光波段波谱
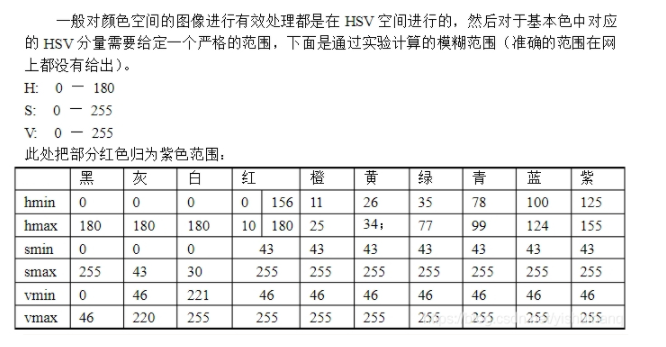
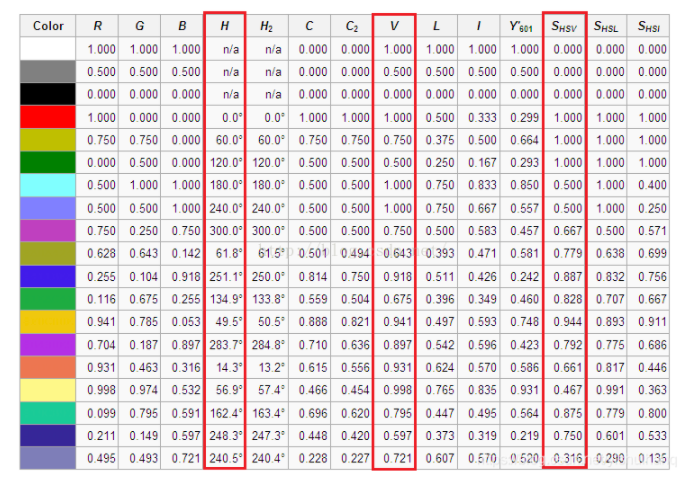
HSV颜色对照表
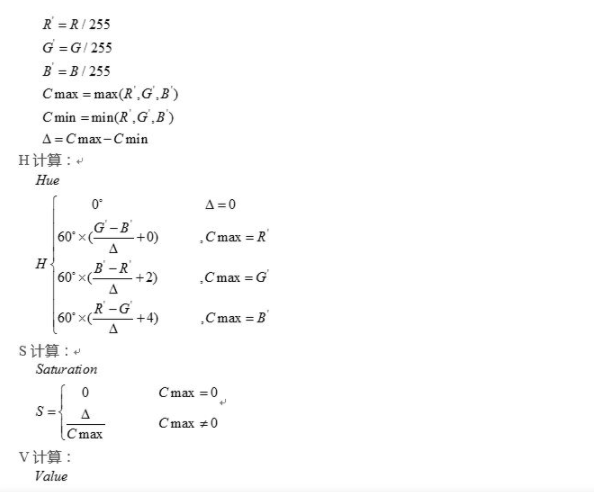
HSV(Hue, Saturation, Value)色彩空间是一种区别与RGB的表示形式。
其中H为色调,用角度度量,取值范围为0°~360°,从红色开始按逆时针方向计算,红色为0°,绿色为120°,蓝色为240°。它们的补色是:黄色为60°,青色为180°,品红为300°;
S为饱和度,饱和度S表示颜色接近光谱色的程度。一种颜色,可以看成是某种光谱色与白色混合的结果。其中光谱色所占的比例愈大,颜色接近光谱色的程度就愈高,颜色的饱和度也就愈高。饱和度高,颜色则深而艳。光谱色的白光成分为0,饱和度达到最高。通常取值范围为0%~100%,值越大,颜色越饱和。
V为亮度,明度表示颜色明亮的程度,对于光源色,明度值与发光体的光亮度有关;对于物体色,此值和物体的透射比或反射比有关。通常取值范围为0%(黑)到100%(白)。
RGB 转 HSV公式:
2、相机的选择
(1)工业数字相机的分类:
工业相机按照芯片类型可以分为CCD相机、CMOS相机;
按照输出色彩可以分为单色(黑白)相机、彩色相机;
按照传感器的结构特性可以分为线阵相机(黑白摄像机、3Line彩色相机、3CCD彩色相机(分光棱镜)、面阵相机(黑白摄像机、Bayer彩色相机、3CCD彩色相机(分光棱镜);
按照输出信号方式可以分为模拟相机(PAL(黑白为CCIR))、NTSC(黑白为EIA))、数字相机(IEEE1394、USB2.0、Camera Link、GigE);
按照扫描方式可以分为隔行扫描相机、逐行扫描相机;
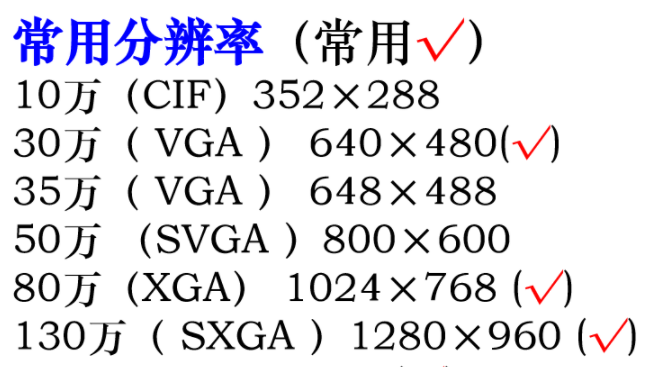
按照分辨率大小可以分为普通分辨率相机、高分辨率相机;
按照输出信号速度可以分为普通速度相机、高速相机;
按照响应频率范围可以分为可见光(普通)相机、红外相机、紫外相机等。
(2)相机的主要参数
相机的主要参数:
①分辨率;②速度(帧频/行频);③噪声;(三) 曝光方式(Exposure)和快门速度(Shutter);④信噪比;⑤动态范围;⑥像元深度;⑦光谱响应;⑧光学接口。
①分辨率
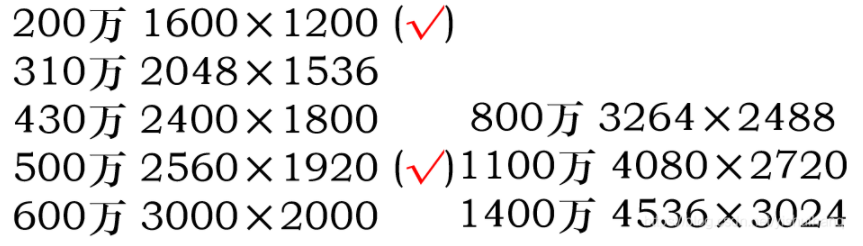
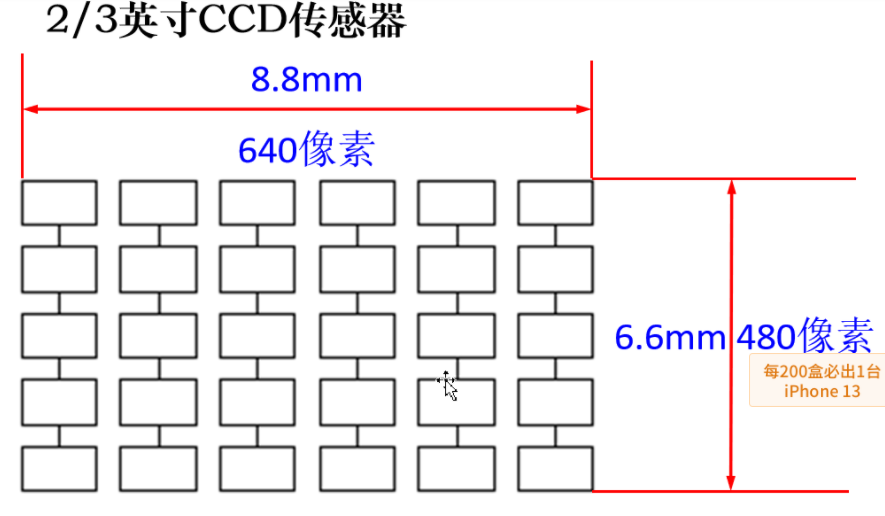
分辨率是相机最基本的参数,由相机所采用的芯片分辨率决定,是芯片靶面排列的像元数量。
通常面阵相机的分辨率用水平和垂直分辨率两个数字表示,如:1920(H)x 1080(V),前面的数字表示每行的像元数量,即共有 1920 个像元,后面的数字表示像元的行数,即 1080 行。现在相机的分辨率通常表示多少 K,如1K(1024),2K(2048), 3K(4096)等。
在采集图像时,相机的分辨率对图像质量有很大的影响。在对同样大的视场(景物范围)成像时,分辨率越高,对细节的展示越明显。
②速度(最大帧率(Frame Rate)/行频(Line Rate))
相机的帧频/行频表示相机采集图像的频率,通常面阵相机用帧频表示,单位 fps(Frame Per second),如 30fps,表示相机在1秒钟内最多能采集 30 帧图像;线阵相机通常用行频便是单位 KHz,如 12KHz 表示相机在1秒钟内最多能采集 12000 行图像数据。
相机采集传输图像的速率,对于面阵相机一般为每秒采集的帧数(Frames/Sec.),对于线阵相机为每秒采集的行数(Lines/Sec.)。
速度是相机的重要参数,在实际应用中很多时候需要对运动物体成像。相机的速度需要满足一定要求,才能清晰准确的对物体成像。相机的帧频和行频首先受到芯片的帧频和行频的影响,芯片的设计最高速度则主要是由芯片所能承受的最高时钟决定。
(三) 曝光方式(Exposure)和快门速度(Shutter)
对于线阵相机都是逐行曝光的方式,可以选择固定行频和外触发同步的采集方式,曝光时间可以与行周期一致,也可以设定一个固定的时间;面阵相机有帧曝光、场曝光和滚动行曝光等几种常见方式,数字相机一般都提供外触发采图的功能。
快门速度一般可到10微秒,高速相机还可以更快。
③噪声
相机的噪声是指成像过程中不希望被采集到的,实际成像目标外的信号。
根据欧洲相机测试标准EMVA1288 中,定义的相机中的噪声从总体上可分为两类:一类是由有效信号带来的符合泊松分布的统计涨落噪声,也叫散粒噪声(shot noise),这种噪声对任何相机都是相同的,不可避免,有其确定的计算公式(噪声的平方=信号的均值);第二类是相机自身固有的与信号无关的噪声,它是由图像传感器读出电路、相机信号处理与放大电路等带来的噪声,每台相机的固有噪声都不一样。另外,对数字相机来说,对视频信号进行模拟转换时会产生量化噪声,量化位数越高,噪声越低。
④信噪比
相机的信噪比定义为图像中信号与噪声的比值(有效信号平均灰度值与噪声均方根的比值),代表了图像的质量,图像信噪比越高,图像质量越好。(信噪比高的相机性能较好)
⑤动态范围
相机的动态范围表明相机探测光信号的范围,动态范围可用两种方法来界定,一种是光学动态范围,指饱和时最大光强与等价于噪声输出的光强的比值,由芯片的特性决定。另一种是电子动态范围,是指饱和电压和噪声电压之间的比值。
对于固定相机其动态范围是一个定值,不随外界条件变化而变化。在线性响应处,相机的动态范围定义为饱和曝光量与噪声等效曝光量的比值:

动态范围可用倍数、dB 或 Bit 等方式来表示。动态范围大,则相机对不同的光照强度有更强的适应能力。
⑥像元/像素深度
数字相机输出的数字信号,即像元灰度值,具有特殊的比特位数,称为像元深度。即每像素数据的位数,一般常用的是8Bit,对于数字相机机一般还会有10Bit、12Bit、14Bit等。
对于黑白相机这个值的方位通常是 8-16bit。像元深度定义了灰度由暗道亮的灰阶数。例如,对于 8bit 的相机 0 代表全暗而 255代表全亮。介于 0 和 255 之间的数字代表一定的亮度指标。10bit 数据就有 1024 个灰阶,而 12bit 有 4096 个灰阶。每一个应用我们都要仔细考虑是否需要非常细腻的灰度等级。从 8bit 上升到 10bit 或者 12bit 的确可以增强测量的精度,但是也同时降低了系统的速度,并且提高了系统集成的难度(线缆增加,尺寸变大),因此我们也要慎重选择。
⑦光谱响应
光谱响应是指相机对于不同波长光线的响应能力,通常指其所采用芯片的光谱响应。通常用光谱曲线表示,横轴表示不同波长,纵轴表示量子效率。按照响应光谱不同也把相机分为可见光相机(400nm—1000nm,峰值在 500nm—600nm 之间),红外相机(响应波长在 700nm 以上),紫外相机(可以响应到 200nm—400nm的短波),我们需要根据接收被测物发光波长的不同来选择不同的光谱响应的相机。
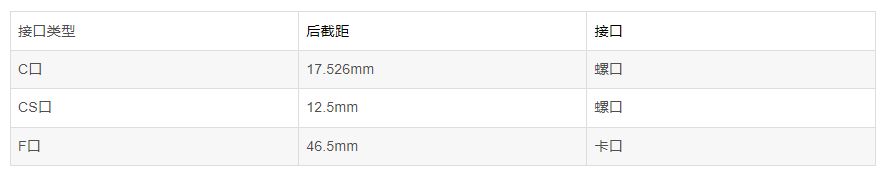
⑧光学接口/接口类型
光学接口是指相机与镜头之间的借口,常用的镜头的借口有 C 口,CS 口,F 口。下表提供了关于镜头安装及后焦距的信息。其中 M42 镜头适配器源于高端摄像标准。另一方面,相机的 Z 轴均依据所提供的适配器而进行了优化,一般情况下不要轻易拆卸镜头适配器。
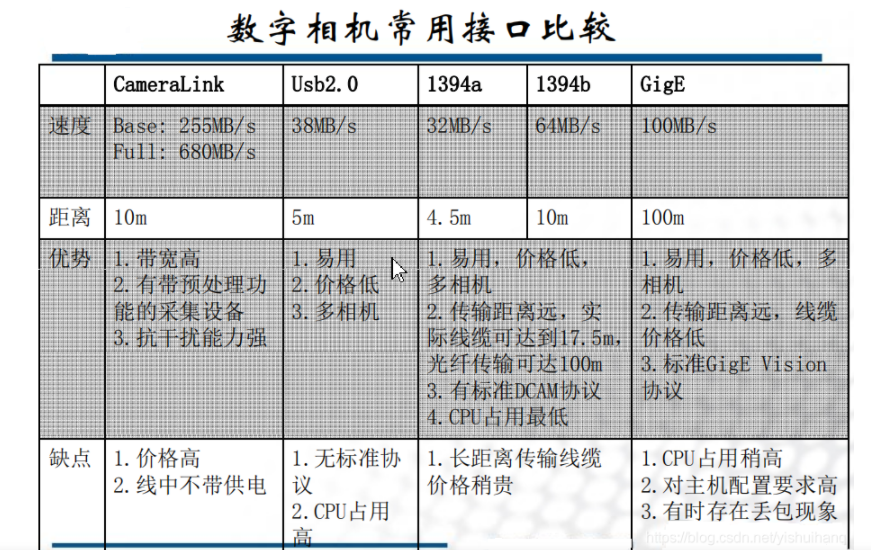
(3)工业数字摄像机主要接口类型
主要有:Usb2.0、IEEE 1394、CameraLink、GiggE。
目前市面上工业相机大多是基于CCD或CMOS芯片的相机。
CCD摄像机,CCD称为电荷耦合器件,CCD实际上只是一个把从图像半导体中出来的电子有组织地储存起来的方法。优点:图像质量高、灵敏度高、对比度高;缺点:有Blooming现象、不能直接访问每个像素、没有片上处理功能。
CMOS摄像机,CMOS称为“互补金属氧化物半导体”,CMOS实际上只是将晶体管放在硅块上的技术,没有更多的含义。CMOS可以将光敏元件、放大器、A/D转换器、存储器、数字信号处理器和计算机接口控制电路集成在一块硅片上。优点:体积小结构简单、片上处理功能多、低功耗、没有Blooming现象、能直接访问单个像素、高动态范围(120dB)、帧率可以更高;缺点:一致性差、光灵敏度差、噪声大。
CCD传感器相机适合高速动态;
CMOS传感器相机适合低速动态或静止。
相对于CCD传感器,CMOS传感器的随机读取特性使其容易实现图像的矩形感兴趣区域(AOI)读出方式。这一特性使得CMOS能针对较小的AOI时可以获得更高的帧率。CMOS传感器的另一优点就是,读出速度快。CMOS传感器的缺点是填充因子很低,通常使用微镜来提高其填充因子。
CCD和COMS区别:
• CCD的优势在于成像质量好;
• CMOS价格比CCD便宜;
• CMOS电源消耗量比CCD低;
• CCD用于动态测量;
• CMOS 用于低速或静态测量。但是现在全
局曝光的CMOS也可用于动态测量;
• 现在CCD是主流,但CMOS正在赶上,而且CMOS是未来。
注:CCD是全局曝光,而CMOS既存在全局曝光又有卷帘曝光。
如何选择工业相机:
首先要弄明白的是自己的检测任务,是静态拍照还是动态拍照、拍照的频率是多少、是做缺陷检测还是尺寸测量或者是定位、产品的大小(拍摄视野)是多少、需要达到的精度多少、所用软件的性能、现场环境情况如何、有没有其它的特殊要求等。
如果是动态拍照,运动速度是多少,根据运动速度选择最小曝光时间以及是否需要逐行扫描的相机;而相机的帧率(最高拍照频率)跟像素有关,通常分辨率越高帧率越低,不同品牌的工业相机的帧率略有不同。
根据检测任务的不同、产品的大小、需要达到的分辨率以及所用软件的性能可以计算出所需工业相机的分辨率;现场环境最要考虑的是温度、湿度、干扰情况以及光照条件来选择不同的工业相机。
考虑待观察或待测量物体的精度,根据精度选择工业相机分辨率。
相机像素精度=单方向视野范围大小/相机单方向分辨率。
则相机单方向分辨率=单方向视野范围大小/理论精度。


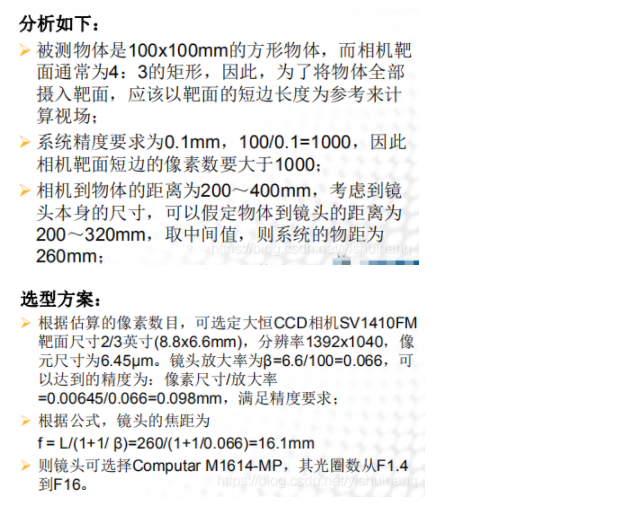
实例1:
实例2:
假设检测一个物体的表面划痕,要求拍摄的物体大小为10*8mm,而要求的检测精度是0.01mm。
首先假设要拍摄的视野范围在12*10mm,那么相机的最低分辨率应该选择在:(12/0.01)*(10/0.01)=1200*1000,约为120万像素的相机,也就是说一个像素对应一个缺陷检测的话那么最低分辨率必须不少于120万像素,但市面上常见的是130万像素的相机,因此一般而言是选用130万像素的相机。
但实际问题是如果一个像素对应一个缺陷的话,那么这样的系统一定会极不稳定,因为随便的一个干扰像素点都可能被误认为缺陷,所以为了提高系统的精准度和稳定性,最好取缺陷的面积在3到4个像素以上,这样选择的相机也就在130万乘3以上,即最低不能少于300万像素,通常采用300万像素的相机为最佳(我见过最多的人抱着亚像素不放说要做到零点几的亚像素,那就不用这么高分辨率的相机了。
相机的曝光时间
相机的最小曝光时间,可以决定目标的运动速度。或者反过来说,目标的运动速度,对相机的最小曝光时间提出了要求。假设我们的目标运动速度是1mm/S,我们的测量精度是0.01mm/pixel,那么我们必须考虑,物体的运动引起的拖影必须要小于我们的精度0.01mm,目标移动0.01mm,需要用时10ms,这就要求我们的相机的曝光时间必须小于10ms,如果大于这个曝光时间,那么仅仅物体运动引起的模糊就会大于0.01,这时我们的精度已经无法达到0.01了。
通常来说,物体运动引起的模糊应该比我们要求的测量精度小一个数量级,这样可以减少其对系统的影响,一般我们的工业相机最快曝光时间可以达到几十至一百多微秒的样子。如此短的曝光时间,对光能量要求比较大,因此需要选择合适的光源与光源控制器。
3、镜头的选择
工业相机镜头由多个透镜、可变(亮度)光圈和对焦环组成。如下图所示,在使用时由操作者观察相机显示屏来调整可变光圈和焦点,以确保图像的明亮程度及清晰度(有些镜头有固定调节系统)。

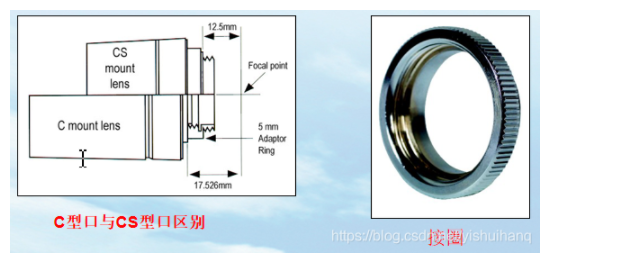
(1)镜头的接口
镜头的接口尺寸是有国际标准的,共有三种接口型式,即F型、C型、CS型,其他有M42、莱卡、哈苏、AK。F型接口是通用型接口,一般适用于焦距大于25mm的镜头;而当物镜的焦距约小于25mm时,因物镜的尺寸不大,便采用C型或CS型接口。
C接口和CS接口的区别:
①C与CS接口的区别在于镜头与摄像机接触面至镜头焦平面(摄像机 CCD光电感应器应处的位置)的距离不同,C型接口此距离为17.526mm,CS型接口此距离为12.5mm。
② C型镜头与C型摄像机,CS型镜头与CS型摄像机可以配合使用。C型镜头与CS型摄像机之间增加一个 5mm的C/CS转接环可以配合使用。CS型镜头与C型摄像机无法配合使用。
(2)工业镜头的基本参
镜头选择应注意:①焦距 ②目标高度 ③影像高度 ④放大倍数 ⑤影像至目标的距离 ⑥中心点/节点 ⑦畸变。
<1>视场(Field of view,即FOV,也叫视野范围)
视场(Field of view,即FOV,也叫视野范围):指观测物体的可视范围,也就是充满相机采集芯片的物体部分。(视场范围是选型中必须要了解的)
Y=f*tanθ,Y:像的大小,f:焦距,θ:半画角
θ=2tan-1*y/2f
例:1/2寸摄像机配12.5mm镜头时画面横向的视场面是:
θ=2tan-1*6.4/2*12.5=28.72
<2>工作距离(Working Distance,即WD)
工作距离(Working Distance,即WD):指从镜头前部到受检验物体的距离。即清晰成像的表面距离(选型必须要了解的问题,工作距离是否可调?包括是否有安装空间等)。
<3>分辨率
分辨率:图像系统可以测到的受检验物体上的最小可分辨特征尺寸。在多数情况下,视野越小,分辨率越好。(在实际选择镜头时,镜头尺寸不能小于相机芯片尺寸,一定要要大于或等于相机芯片尺寸)
影响分辨率的主要因素:镜头结构、材质、加工精度等。
其它因素:
镜头光圈越大,分辨率越高;
光波长度,波长越短分辨率越高;
同档次的固定焦距镜头比变焦镜头分辨率高;
短焦镜头一般边缘分辨率比中心低;长焦镜头一般中心比边缘分辨率低。
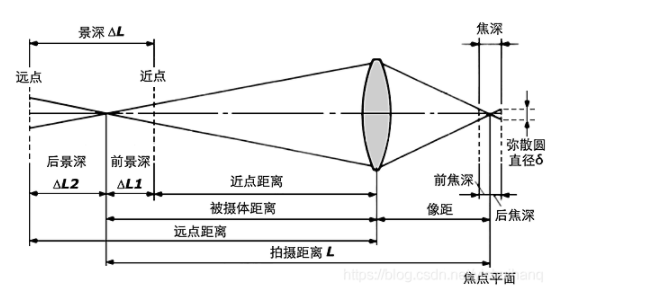
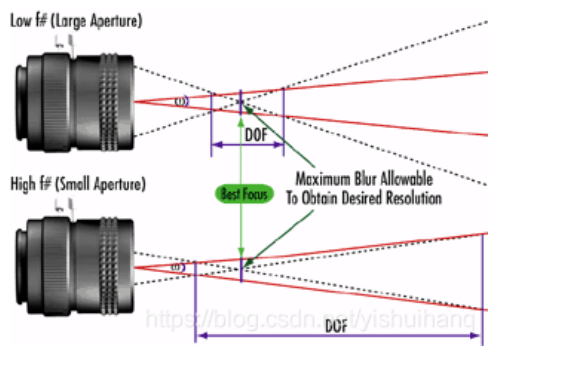
<4>景深(Depth of view,即DOF)
景深(Depth of view,即DOF):物体离最佳焦点较近或较远时,镜头保持所需分辨率的能力(需要了解客户对景深是否有特殊要求?)
景深和镜头的焦距、光圈、物距有关:
光圈越小,景深越大;
拍摄距离越大,景深越大;
焦距越短,景深越大。
<5>焦距(f)
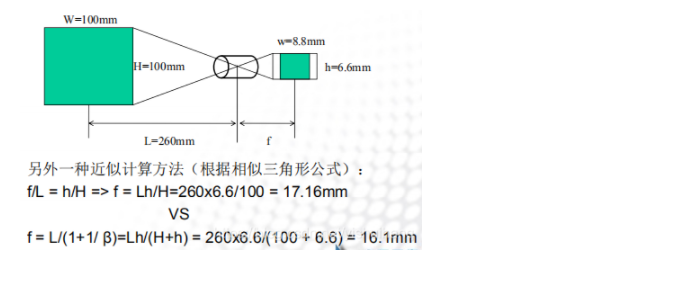
焦距(f):是光学系统中衡量光的聚集或发散的度量方式,指从透镜的光心到光聚集之焦点的距离。亦是照相机中,从镜片中心到底片或CCD等成像平面的距离。(需要记住的重要公式)
f = {工作距离/视野范围长边(或短边)}*CCD长边(或短)
焦距大小的影响情况:
焦距越小,景深越大;焦距越小,畸变越大;焦距越小,渐晕现象越严重,使像差边缘的照度降低。
===============================================================================
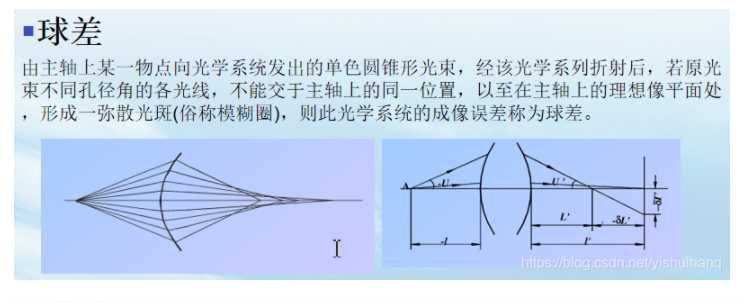
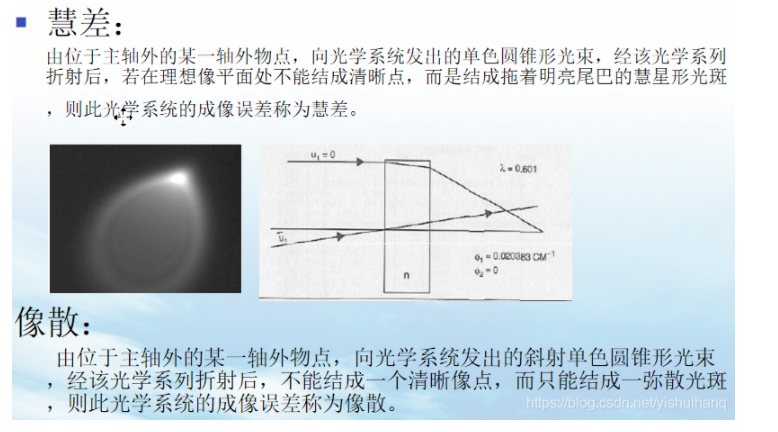
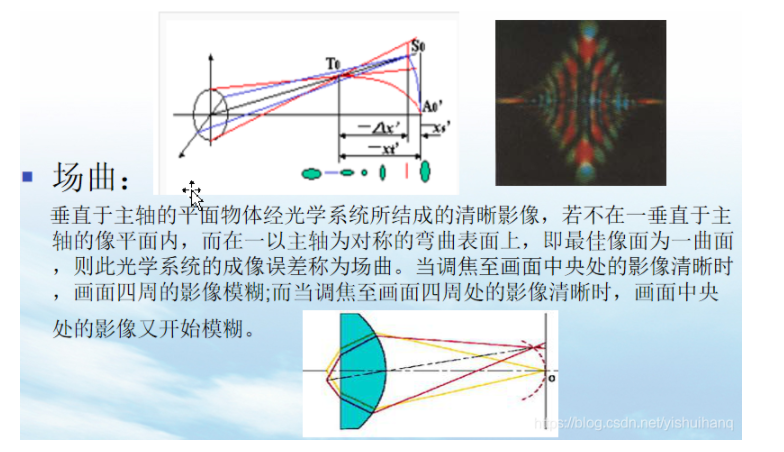
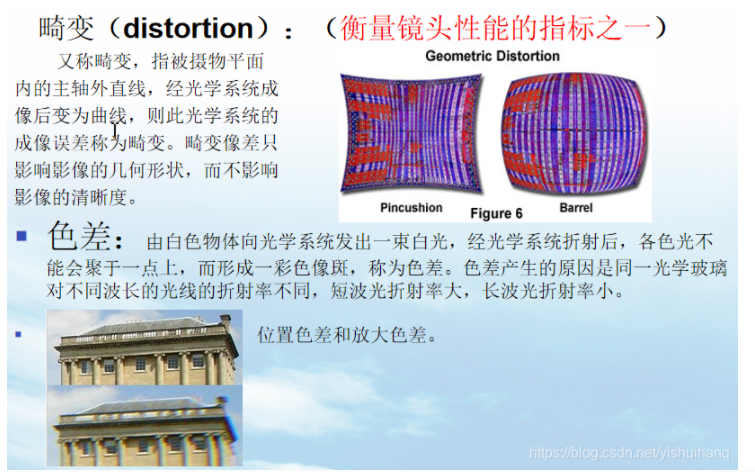
像差是影响图像质量的重要方面,常见的像差有如下六种:球差、慧差、像散、场曲、畸变、色差。
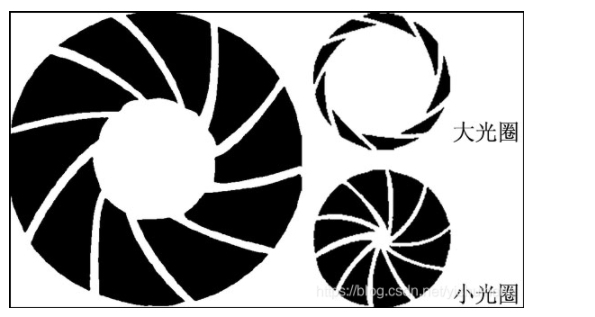
<6>光圈与F值
光圈是一个用来控制镜头通光量装置,它通常是在镜头内。表达光圈大小我们是用F值,如f1.4,f2,f2.8。
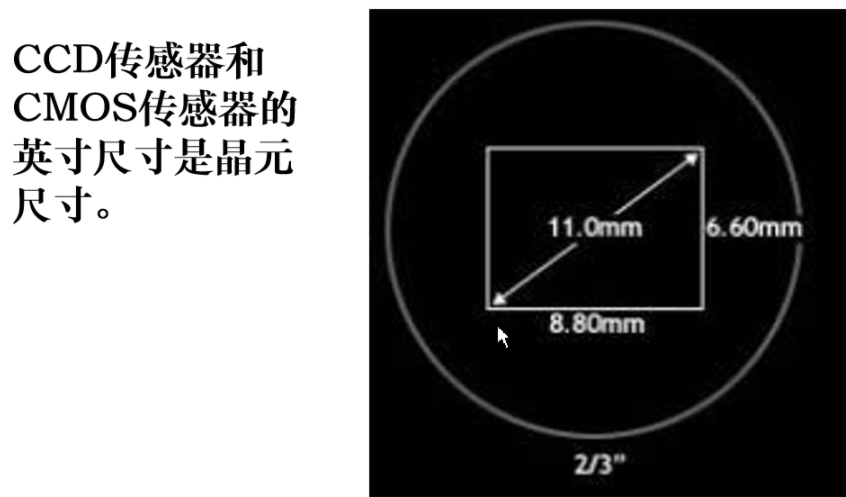
<8>感光芯片尺寸
相机感光芯片的有效区域尺寸,一般指水平尺寸。这个参数对于决定合适的镜头缩放比例以获取想要的视场非常重要。镜头主要缩放比例 (PMAG) 由感光芯片的尺寸和视场的比率来定义。虽然基本参数包括感光芯片的尺寸和视场,但PMAG却不属于基本参数。
<9>光学放大倍数
用于计算主要缩放比例的公式如下:
PMAG = CCD Size / FOV
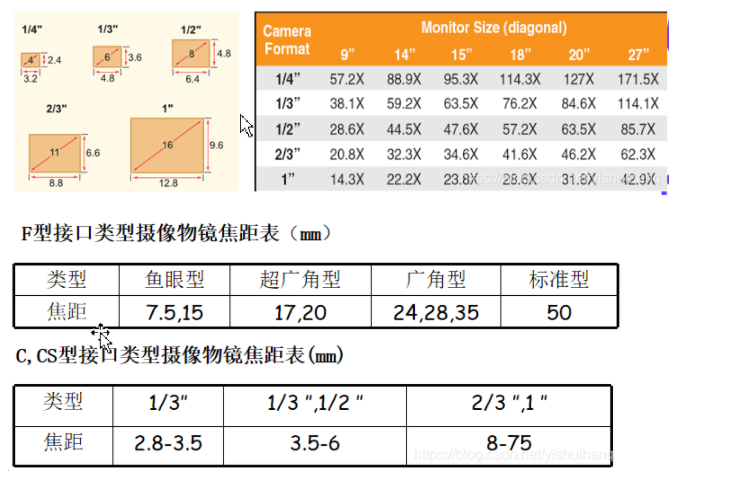
显示放大倍数:
显示放大倍率在显微中应用非常广泛,被测物体的显示放大倍率取决于三个因素:镜头光学倍率、工业相机感光芯片的尺寸(靶面大小)、显示器尺寸。
显示放大倍率=镜头光学倍率×显示器尺寸×25.4/耙面对角线尺寸。
工业镜头各参数间相互影响关系:
光圈大小的影响情况:
光圈越大,图像亮度越高;景深越小;分辨率越高;
像场中央与边缘:
一般像场中心较边缘分辨率高;像场中心较边缘光场照度高。
光波长度的影响:
在相同的工业相机及镜头参数条件下,照明光源的光波波长越短,得到的图像的分辨力越高。所以在需要精密尺寸及位置测量的视觉系统中,尽量采用短波长的单色光作为照明光源,对提高系统精度有很大的作用。
(3)镜头的分类
为了适应不同的应用场合,镜头有多种类型,从不同的角度,就有不同的划分方法:
按光学放大倍率及焦距划分:
a、显微镜:体视显微镜、生物显微镜、金相显微镜、测量显微镜
b、常规镜头:
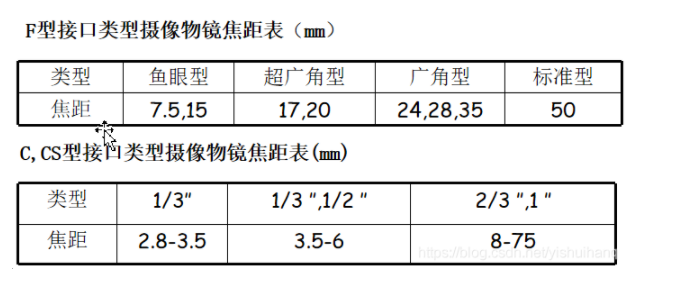
鱼眼镜头:6-16mm
超广角镜头:17-21mm
广角镜头:24-35mm
标准镜头:45-75mm
长焦镜头:150-300mm
超长焦镜头:300mm以上
c、特殊镜头:
微距镜头
远距镜头
远心镜头
红外镜头
紫外镜头
按其它性能划分:
固定焦距镜头;
变焦镜头:
自动变焦
手动变焦
不同接口方式的镜头:
C接口(后截距17.526mm)
CS接口(后截距12.5mm)
F接口(尼康口)
M42
其它:哈苏、徕卡、AK
各种镜头常用配件:
近拍接圈
偏振镜
滤色片
UV镜
雷登镜
增温镜
各色滤镜
带通滤镜
增倍镜
分光镜
棱镜
远心镜头特性
远心镜头(Telecentric lens),主要是为纠正传统镜头的视差而特殊设计的镜头,它可以在一定的物距范围内,使得到的图像放大倍率不会随物距的变化而变化,这对被测物不在同一物面上的情况是非常重要的应用。此外,远心镜头(Telecentric lens)相比普通镜头,还具有低畸变,高景深,高分辨力等特性 。远心镜头由于其特有的平行光路设计一直为对镜头畸变要求很高的机器视觉应用场合所青睐,广泛应用于半导体、机械零部件,科研、激光测径,印钞等相关行业,主要完成精密测量、定位等工作任务。
1.远心特性 非远心镜头下图光学系统无法确保视场内一致的放大率,于是总会造成测量精度的下降。
2.低畸变特性 大多数精确测量的场合需要对微小畸变进行标定,优秀的远心镜头厂家采集精确的灰度图像并进行精确分析以测量畸变,使得远心镜头的畸变如此微小,更真实的还原图像。
3.高景深范围和高解析度过小的景深会引起对比度的下降,结果会降低分辨力。远心镜头具有高的景深范围和解析度,满足各种不同的测试要求。
远心镜头与普通镜头对比
远心工业镜头主要是为纠正传统工业镜头的视差而特殊设计的镜头,它可以在一定的物距范围内,使得到的图像放大倍率不会随物距的变化而变化,这对被测物不在同一物面上的情况是非常重要的应用。
普通工业镜头目标物体越靠近镜头(工作距离越短),所成的像就越大。在使用普通镜头进行尺寸测量时,会存在如下问题:
1)由于被测量物体不在同一个测量平面,而造成放大倍率的不同;
2)镜头畸变大
3)视差也就是当物距变大时,对物体的放大倍数也改变;
4)镜头的解析度不高;
5)由于视觉光源的几何特性,而造成的图像边缘位置的不确定性。
而远心镜头就可以有效解决普通镜头存在的上述问题,而且没有此性质的判断误差,因此可用在高精度测量、度量计量等方面。远心镜头是一种高端的工业镜头,通常有比较出众的像质,特别适合于尺寸测量的应用。
无论何处,在特定的工作距离,重新调焦后会有相同的放大倍率,因为远心镜头的最大视场范围直接与镜头的光栏接近程度有关,镜头尺寸越大,需要的现场就越大。远心测量镜头能提供优越的影像质素,畸变比传统定焦镜头小,这种光学设计令影像面更对称,可配合软件进行精密测量。
普通镜头优点:成本低,实用,用途广。
普通镜头缺点:放大倍率会有变化,有视差。
普通镜头应用:大物体成像。
远心镜头的优点:放大倍数恒定,不随景深变化而变化,无视差。
远心镜头的缺点:成本高,尺寸大,重量重。
远心镜头的应用:度量衡方面,基于CCD方面的测量,微晶学
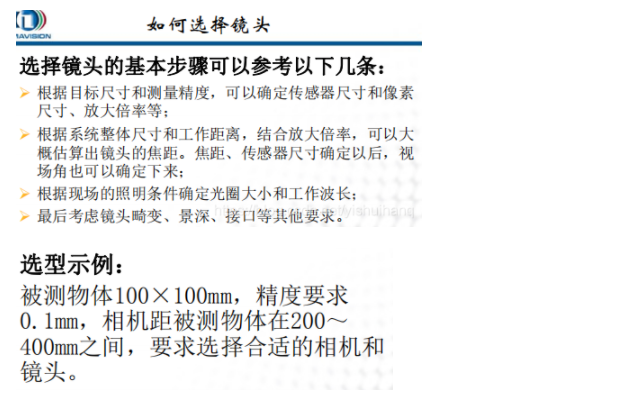
工业镜头的选择要点:
对镜头的选择,我们首先必须先确定客户需求:
1、视野范围、光学放大倍数及期望的工作距离:在选择镜头时,我们会选择比被测物体视野稍大一点的镜头,以有利于运动控制。
2、景深要求:对于对景深有要求的项目,尽可能使用小的光圈;在选择放大倍率的镜头时,在项目许可下尽可能选用低倍率镜头。如果项目要求比较苛刻时,倾向选择高景深的尖端镜头。
3、芯片大小和相机接口:例如2/3’’镜头支持最大的工业相机耙面为2/3’’,它是不能支持1英寸以上的工业相机。
4、注意与光源的配合,选配合适的镜头 。
5、可安装空间:在方案可选择情况下,让客户更改设备尺寸是不现实的。
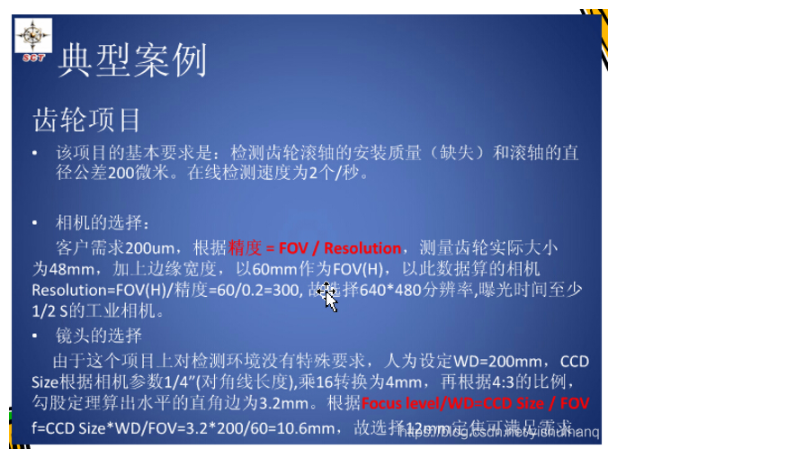
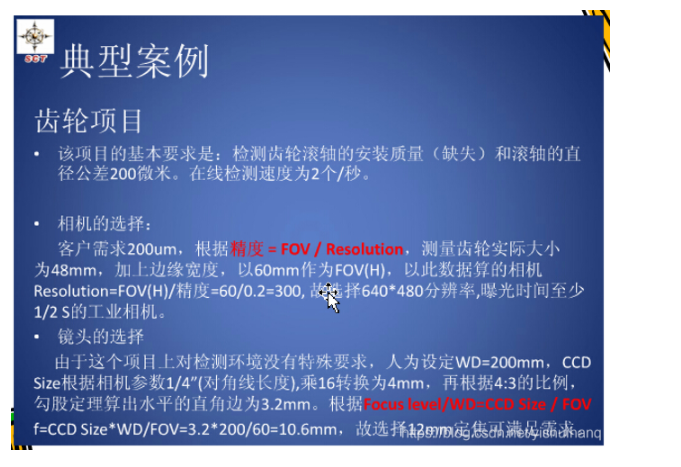
典型的选型案例:
案例一:
案例二:
常用的工业镜头品牌:

快门速度计算:
假设速度是 0.5m/s, sensor 为 640*480 的分辨率,视场为4.2*3mm,
则有:4.2mm/640=0.00656mm ,3mm/480=0.00625mm,取最小的像素当量,此时的当量为一个像素=0.000625mm。
当物体在快门时间内的运动大于 1.5 个像素时可以认为会出现拖影,因此要不出现拖影则:
t(快门)小于或者等于 0.00625mm*1.5/0.5m/s=0.00001875s。
t=像素当量 x1.5(指定的常数)/运动速度。
像元尺寸=CCD 长/水平方向分辨率(或者 CCD 宽/垂直方向分辨率)。
一般长的方向对着视野长的方向,宽的方向对视野短的方向。
4. 图像采集卡
图像采集卡只是完整的机器视觉系统的一个部件,但是它扮演一个非常重要的角色。图像采集卡直接决定了摄像头的接口:黑白、彩色、模拟、数字等等。
比较典型的是PCI或AGP兼容的捕获卡,可以将图像迅速地传送到计算机存储器进行处理。有些采集卡有内置的多路开关。例如,可以连接8个不同的摄像机,然后告诉采集卡采用那一个相机抓拍到的信息。有些采集卡有内置的数字输入以触发采集卡进行捕捉,当采集卡抓拍图像时数字输出口就触发闸门。
图像采集卡的主要功能:
A/D转换
图像传输
图像采集控制
模拟量图像采集卡:
标准视频信号采集: PAL、NTSC
非标准视频信号采集
数字量图像采集卡:
IEEE1394卡
RS-644 LVDS
Channel Link LVDS
Camera Link LVDS
千兆网图像传输卡/传输器
5.视觉处理器
视觉处理器集采集卡与处理器于一体。以往计算机速度较慢时,采用视觉处理器加快视觉处理任务。现在由于采集卡可以快速传输图像到存储器,而且计算机也快多了,所以现在视觉处理器用的较少了。
二、算法(预处理算法、检测算法)
常用的图像处理算法:
1、图像变换:(空域与频域、几何变换、色度变换、尺度变换)
几何变换:图像平移、旋转、镜像、转置;
尺度变换:图像缩放、插值算法(最近邻插值、双线性插值、双三次插值);
空域与频域间变换:由于图像阵列很大,直接在空间域中进行处理,涉及计算量很大。因此,有时候需要将空间域变换到频域进行处理。例如:傅立叶变换、沃尔什变换、离散余弦变换等间接处理技术,将空间域的处理转换为频域处理,不仅可减少计算量,而且可获得更有效的处理(如傅立叶变换可在频域中进行数字滤波处理)。
2、图像增强:
图像增强不考虑图像降质的原因,突出图像中所感兴趣的部分。如强化图像高频分量,可使图像中物体轮廓清晰,细节明显;如强化低频分量可减少图像中噪声影响。
灰度变换增强(线性灰度变换、分段线性灰度变换、非线性灰度变换);
直方图增强(灰度直方图、直方图均衡化);
图像平滑/降噪(邻域平均法、加权平均法、中值滤波、非线性均值滤波、高斯滤波、双边滤波);
图像(边缘)锐化:梯度锐化,Roberts算子、Laplace算子、Sobel算子等;
3、纹理分析(取骨架、连通性);
4、图像分割:
图像分割是将图像中有意义的特征部分提取出来,其有意义的特征有图像中的边缘、区域等,这是进一步进行图像识别、分析和理解的基础。
(1)阈值分割(固定阈值分割、最优/OTSU阈值分割、自适应阈值分割);
(2)基于边界分割(Canny边缘检测、轮廓提取、边界跟踪);
(3)Hough变换(Hough变换直线检测、Hough变换圆检测);
(4)基于区域分割(区域生长、区域归并与分裂、聚类分割);
(5)色彩分割;
(6)分水岭分割;
5、图像特征:
(1)几何特征(位置与方向、周长、面积、长轴与短轴、距离(欧式距离、街区距离、棋盘距离));
(2)形状特征(几何形态分析(Blob分析):矩形度、圆形度、不变矩、偏心率、多边形描述、曲线描述);
(3)幅值特征(矩、投影);
(4)直方图特征(统计特征):均值、方差、能量、熵、L1范数、L2范数等;直方图特征方法计算简单、具有平移和旋转不变性、对颜色像素的精确空间分布不敏感等,在表面检测、缺陷识别有不少应用。
(5)颜色特征(颜色直方图、颜色矩)
(6)局部二值模式( LBP)特征:LBP对诸如光照变化等造成的图像灰度变化具有较强的鲁棒性,在表面缺陷检测、指纹识别、光学字符识别、人脸识别及车牌识别等领域有所应用。由于LBP 计算简单,也可以用于实时检测。
6、图像/模板匹配:
轮廓匹配、归一化积相关灰度匹配、不变矩匹配、最小均方误差匹配
7、色彩分析
色度、色密度、光谱、颜色直方图、自动白平衡
8、图像数据编码压缩和传输
图像编码压缩技术可减少描述图像的数据量(即比特数),以便节省图像传输、处理时间和减少所占用的存储器容量。压缩可以在不失真的前提下获得,也可以在允许的失真条件下进行。编码是压缩技术中最重要的方法,它在图像处理技术中是发展最早且比较成熟的技术。
9、表面缺陷目标识别算法:
传统方法:贝叶斯分类、K最近邻(KNN)、人工神经网络(ANN)、支持向量机(SVM)、K-means等;
10、图像分类(识别)
图像分类(识别)属于模式识别的范畴,其主要内容是图像经过某些预处理(增强、复原、压缩)后,进行图像分割和特征提取,从而进行判决分类。
11、图像复原
图像复原要求对图像降质的原因有一定的了解,一般讲应根据降质过程建立“降质模型”,再采用某种滤波方法,恢复或重建原来的图像。
三、现有可用的视觉检测软件/库
1、做工业视觉检测的公司有哪些?
比较出名的有:大恒图像(亚洲Halcon最大代理商)、凌云光技术(VisionPro视觉平台:印刷、3C电子、显示屏、玻璃、线路板检测)、大族激光(振静系统:视觉激光焊接,定视觉位、缺陷检测)、康耐视、基恩士、深圳精锐视觉、深圳市视觉龙科技有限公司、广州超音速、深圳市创科自动化等等。
可二次开发的视觉系统:Labview、DVT、Halcon、OpenCV等。
2、常用的视觉检测软件/库
视觉开发软件工具 Halcon、VisionPro、LabView、OpenCV, 还有eVision、Mil、Sapera等。
(一)、Halcon:底层功能算法多,运算性能快,功能齐全,容易上手,开发项目周期短。非开源项目,商用收费,价格较贵。
Halcon:Halcon是德国MVtec公司开发的一套完善的标准的机器视觉算法包,拥有应用广泛的机器视觉集成开发环境。它是一套image processing library,由一千多个各自独立的函数,以及底层的数据管理核心构成。其中包含了各类滤波,色彩以及几何,数学转换,型态学计算分析,校正,分类辨识,形状搜寻等等基本的几何以及影像计算功能。整个函数库可以用C,C++,C#,Visual basic和Delphi等多种普通编程语言访问。Halcon为大量的图像获取设备提供接口,保证了硬件的独立性。
(二)OpenCV:功能算法相对较多(比Halcon少),开源,可用于商用,开发周期较长(比Halcon长),有些算法要自己写。
OpenCV是一个基于(开源)发行的跨平台计算机视觉库,可以运行在Linux、Windows和Mac OS操作系统上。其核心轻量级而且高效——由一系列 C 函数和少量 C++ 类构成,实现了图像处理和计算机视觉方面的很多通用算法。OpenCV用C++语言编写,它的主要接口也是C++语言。该库也有大量的Python, Java and MATLAB/OCTAVE的接口,如今也提供对于C#, Ruby的支持。OpenCV可以在 Windows, Android, Maemo, FreeBSD, OpenBSD, iOS,Linux 和Mac OS等平台上运行。
OpenCV出身:OpenCV是Intel开源计算机视觉库。其核心由一系列 C 函数和少量 C++ 类构成,实现了图像处理和计算机视觉方面的很多通用算法。OpenCV 的特点拥有包括300多个C函数的跨平台的中、高层 API 跨平台:Windows, Linux;免费(FREE):无论对非商业应用和商业应用;速度快;使用方便。
OpenCV具有以下的特征:(1)开源计算机视觉采用C/C++编写。(2)使用目的是开发实时应用程序。(3)独立与操作系统、硬件和图形管理器。(4)具有通用的图象/视频载入、保存和获取模块。(5)具有底层和高层的应用开发包。
应用OpenCV能够实现以下功能:(1)对图象数据的操作,包括分配、释放、复制和转换数据。(2)对图象和视频的输入输出,指文件和摄像头作为输入,图象和视频文件作为输出。(3)具有对距陈和向量的操作以及线性代数的算法程序,包括距阵、解方程、特征值以及奇异值。(4)可对各种动态数据结构,如列表、队列、集合、树和图等进行操作。(5)具有基本的数字图象处理能力,如可进行滤波、边缘检测、角点检测、采样与差值、色彩转换、形态操作、直方图和图象金字塔等操作。
(6)可对各种结构进行分析,包括连接部件分析、轮廓处理、距离变换、各种距的计算、模板匹配、Hongh变换、多边形逼近、直线拟合、椭圆拟合和Delaunay三角划分等。(7)对摄像头的定标,包括发现与跟踪定标模式、定标、基本矩阵估计、齐次矩阵估计和立体对应。(8)对运动的分析,如对光流、运动分割和跟踪的分析。(9)对目标的识别,可采用特征法和隐马尔科夫模型(HMM)法。(10)具有基本的GUI功能,包括图像与视频显示、键盘和鼠标事件处理及滚动条等。(11)可对图像进行标注,如对线、二次曲线和多边形进行标注,还可以书写文字(目前之支持中文)。
(三)VisionPro
VisionPro是美国康耐视Cognex公司提供全套视觉解决方案。VisionPro提供多种开发工具拖放式界面、简单指令码和编程方式等,全面支持所有模式的开发。用户利用VisionPro QuickBuild可以无需编程配置读取、选择并优化视觉工具,决定产品是否合格。用户也可以利用C++、C#、VB及.NET开发管理应用程序。Vision Pro提供的.NET程序接口允许用户采用面向对象的高级语言编程访问所有工具,以高效开发客户的专用视觉方案。
(四)LabView
LabView是一种程序开发环境,由美国国 家仪器(NI)公司研制开发,使用的是图形化编辑语言G编写程序,产生的程序是框图的形式。LabView软件是NI设计平台的核心,也是开发测量或控制系统的理想选择。LabView开发环境集成了工程师和科学家快速构建各种应用所需的所有工具,旨在帮助工程师和科学家解决问题、提高生产力和不断创新。
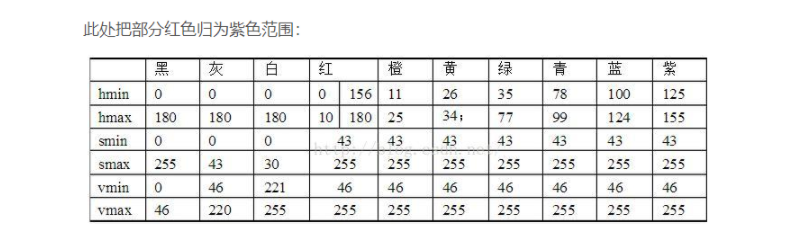
HSV颜色识别-HSV基本颜色分量范围
一般对颜色空间的图像进行有效处理都是在HSV空间进行的,然后对于基本色中对应的HSV分量需要给定一个严格的范围,下面是通过实验计算的模糊范围(准确的范围在网上都没有给出)。
H: 0 — 180
S: 0 — 255
V: 0 — 255
HSV(色相/饱和度/明度)颜色空间是表示类似于RGB颜色模型的颜色空间的模型。根据色相通道(Channel)对颜色类型进行建模,因此在需要根据颜色对对象进行分割的图像处理任务中非常有用。饱和度的变化代表颜色成分的多少。明度通道描述颜色的亮度。
审核编辑 :李倩
-
机器视觉
+关注
关注
166文章
4851浏览量
126704 -
数据管理
+关注
关注
1文章
349浏览量
20636 -
工业检测
+关注
关注
0文章
80浏览量
10368
原文标题:全面解析机器视觉工业缺陷检测(光源,相机,镜头,算法)
文章出处:【微信号:机器视觉沙龙,微信公众号:机器视觉沙龙】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录






评论