 如何识别不同类型的抖动
如何识别不同类型的抖动
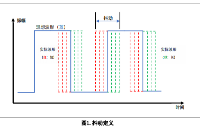
NIST将抖动定义为“数字信号的重要时刻从其理想位置的短期相位变化”。我们将抖动想象为波的位置变化,形成从它应该在的位置上升或下降沿(“它应该在哪里”的很多意思是导致设计人员可能必须考虑的不同类型的抖动 - 稍后会详细介绍)。术语抖动保留用于 10Hz 以上的信号相位变化 – 低于 10Hz 时,术语 Wander 适用。随着振荡器信号的倍增和滤波,抖动也会倍增和滤波,系统的时序预算会迅速消失。正是在这里,我们看到了抖动的问题,因此设计人员必须充分了解时序抖动及其对系统设计的影响。
什么原因导致抖动?
抖动可能是振荡器本身固有噪声导致信号相位或幅度调制的结果,也可能是系统中的其他干扰的结果,例如电源噪声、热噪声、振动、串扰或其他组件的干扰以及许多其他因素。
我们如何对抖动进行分类?
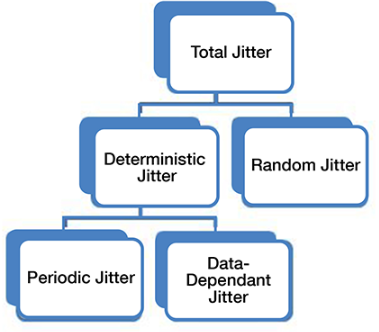
在大多数讨论中,抖动分为两大类之一:确定性抖动和随机抖动(DJ和RJ)。右图显示了抖动的快速分析,包括对 DJ 和 RJ 不同组件的简要介绍。
随机抖动 随机抖动
是一种始终存在的现象,无法始终预测。设备经历的随机抖动是多个次要因素的组合,包括热噪声、走线宽度变化、散粒噪声、闪烁等。随机抖动是一种宽带随机高斯过程,有时被称为固有噪声,因为它始终存在。随机抖动具有无限的正态概率分布函数 (PDF),并且无法保持明确定义的峰峰值。相反,它通常由其标准偏差来描述。随机抖动也独立于其他抖动源,因为它的存在不会放大其他抖动源的影响。
确定性抖
动 确定性抖动(有时称为有界抖动)通常被定义为,如果系统的所有组件都已知,那么您可以准确预测在每个过渡边沿将观察到的抖动量。由于确定性抖动由所有其他非随机形式的抖动组成,因此它不遵循一般分布函数。非随机抖动源的数量有限,因此我们可以推断出它有一个有界的 PDF。这使我们能够通过峰峰值(可量化值)来表征确定性抖动。
确定性抖动可以进一步分为两个子类别:周期性抖动和数据相关抖动。周期性抖动包括固定频率或周期下的任何抖动。它易于准确测量,并在频谱中显示为不同的峰值。周期性抖动的一些很好的例子是电源噪声和来自相邻数据线的串扰。数据相关抖动包括其幅度受信号占空比或时钟边沿变化影响的所有抖动。例如,在数据流中,交替位 (01010101) 的 0 和 1 之间的转换与遵循一长串相同位 (00011001) 的转换将有所不同。由于时钟和振荡器中不存在这种类型的行为,因此这种形式的确定性抖动被认为是非因素。
有许多方法可以对抖动进行分类,虽然了解您观察到的抖动类型很重要,但能够测量不同类型的抖动同样重要,如果不是更重要的话,以便可以努力过滤/消除它们并降低系统的整体误码率 (BER)。
审核编辑:郭婷
-
电源
+关注
关注
184文章
17541浏览量
249376 -
振荡器
+关注
关注
28文章
3811浏览量
138854 -
滤波
+关注
关注
10文章
662浏览量
56582
发布评论请先 登录
相关推荐
请问公交刷卡设备怎样对不同类型的卡片进行识别?
什么是不同类型的生物识别传感器?
时钟抖动的基础
了解不同类型的PCB及其优势
抖动定义和测量





 工商网监
工商网监
评论