 如何简化航空应用中的电机位置控制系统
如何简化航空应用中的电机位置控制系统
用于飞机和国防应用的线性执行器控制系统
随着飞机重量、尺寸和速度的增加,飞行控制表面驱动需要更高效、更可靠的半导体解决方案。
在这篇博文中,我们将演示一个线性执行器控制系统,该系统使用 LX4580 24 通道数据采集系统,该系统具有同步电机控制接口片上系统 (SoC) 和双 ATSAMV71 MCU。
航空业正在转向电动飞机(MEA),用电动解决方案取代机械、液压和气动系统。这导致重量显着减轻,从而减少油耗和排放。使用较少机械内容的另一个好处是提高了可靠性并减少了维护和拥有费用。
LX4580 驱动芯片
LX4580 是一款模拟前端,适用于在 DO-160 等严格标准下工作的电机执行器控制系统。LX4580与MCU或现场可编程门阵列(FPGA)接口,以实时执行数字控制系统算法。双高速串行外设接口 (SPI) 或通用异步接收器和发射器 (UART) 接口为冗余命令/监视器 (COM/MON) 系统架构提供同步双端口寄存器访问。这些接口使用 ECC 编码在每个 1 位数据事务中提供 2 位纠错和 16 位错误检测。顺序逻辑通过三模式冗余 (TMR) 实现,以防止单事件翻转 (SEU)。模拟输入、LVDT 驱动器和逻辑 I/O 可以冷备用,允许两个 LX4580 以冗余配置运行,其中一个通电,另一个关闭或复位。系统配置、校准和接口设置数据存储在内部一次性可编程(OTP)存储器中,并在上电时自动加载。图1显示了典型应用中LX4580的内部功能和外部连接。
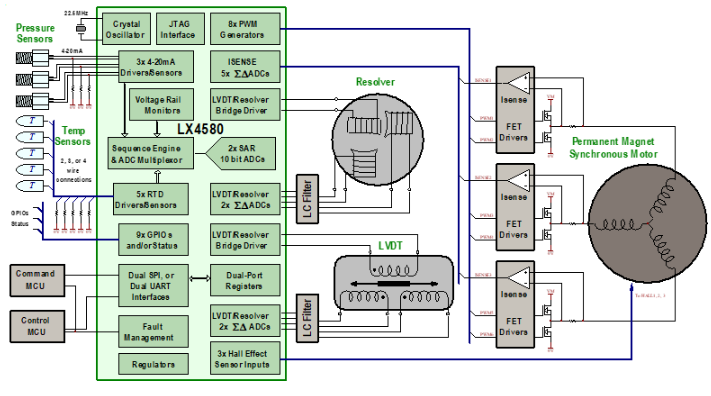
图 1:典型致动应用
典型控制系统架构
飞机和机载防御系统中使用的电机位置和线性驱动控制系统可以使用带有双 ATSAMV4580Q71 MCU 的 LX21 电机采集 SoC 来实现。MCU 运行电机控制环路,并在经典命令/监视器 (COM/MON) 双控制器冗余控制系统中生成电机控制信号(图 2)。LX4580 SoC管理传感器(在本例中为一个LVDT和两个温度传感器),并直接驱动LVDT初级,计算两个LVDT次级的RMS,并基于PT100或TP1000远程传感器自动进行温度检测。
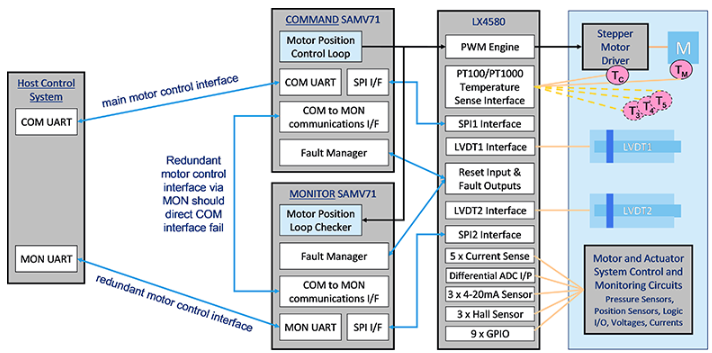
图 2:带双处理器的 COM/MON 电机控制系统
为了提供这种控制系统实现的实际演示,我们开发了电机位置控制系统的源代码,该系统使用LVDT作为位置反馈传感器,作为更大控制系统的核心。通过使用现成的步进电机控制器,而不是使用LX4580的脉宽调制(PWM)输出和电流检测输入,简化了电机驱动硬件。
COM 处理器函数
COM处理器是主要的电机控制处理器。其功能是:
与主系统控制器通信,以进行位置目标设置和高级诊断
使用 LX4580 获取系统位置、温度和其他状态
基于带迟滞的相位检测 (PD) 环路控制 TB6600 电机驱动器(下图 3)
执行错误检查
将结果传送给 MON 处理器以比较结果并读取 MON 错误状态
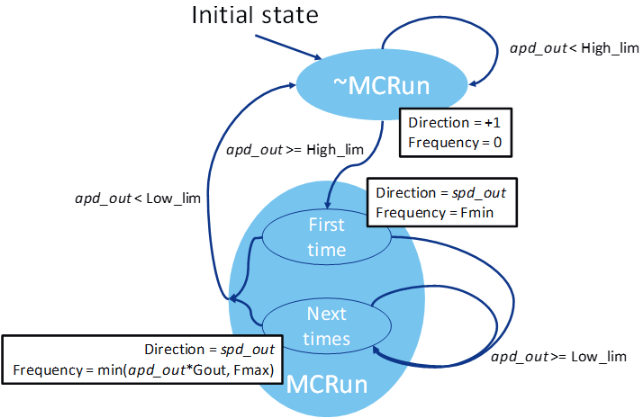
图3:相位检测环路
周一处理器功能
MON处理器是备用电机控制处理器。其功能是:
与主系统控制器通信,以进行位置目标设置、高级诊断和错误报告
使用 LX4580 获取位置(使用 LX2 的第二个 LVDT 通道独立)、温度和其他状态
监视 COM 处理器控制输出
测量脉冲波形指令电机步进的频率
检测DIR波形的极性,指示电机方向
运行与COM处理器相同的控制电机驱动算法,但基于MON处理器收集的数据
与 COM 处理器通信以获取 COM 结果并报告错误
错误检查COM和MON之间的数据不一致(脉冲频率,位置,温度)
COM 和 MON 处理器之间的通信使用 UART 接口访问共享内存区域。
电脑(主系统控制器)
PC软件在Python中运行命令系统,该系统通过单独的USB接口与COM和MON处理器进行通信。命令被调度到 COM 和 MON 处理器,以允许 MON 处理器检测 COM 或 MON 接口故障。在错误检测时,MON 处理器将 COM 命令与电机隔离,并将等待,直到更高级别的控制可以处理错误并可能重新启动控制过程。
审核编辑:郭婷
-
FPGA
+关注
关注
1630文章
21761浏览量
604386 -
接收器
+关注
关注
14文章
2473浏览量
72015 -
电机
+关注
关注
142文章
9044浏览量
145801
发布评论请先 登录
相关推荐
AC6011电机位置控制源程序
【原创分享】磁旋转编码器在永磁同步电机位置测量中的应用
基于模糊神经网络和PI控制的异步电机位置控制系统

电机位置编码器接口设计

伺服电机位置模式应用的案例有哪些?
基于S7-1200 PLC的步进电机位置控制系统设计






 工商网监
工商网监
评论