 UWB的定位算法简单介绍
UWB的定位算法简单介绍
根据上一篇的介绍,UWB的定位算法可以分为三类:基于接收信号的强度(RSS,Received Signal Strength)、基于到达角度(Angle of Arrival)、基于到达时间(TOA,Time of Arrival)。不管是什么方式,其技术实现大致是一样的:都是通过测量接收信号中的某些特征值,比如信号强度、角度、时间等,再采用相关算法来实现对目标的定位。下面分别介绍这三类算法:
RSS的原理是通过坐标位置已知的探测器测量待测目标所在位置的信号强度,由于信号强度与信号衰减满足一定的关系,可以利用它来估算出待测目标到当前测量探测器的距离。其定位原理与TOA相同,只是获取距离的方法不一样,对于RSS,其测量的距离和衰减之间的关系依赖于信道特性,所以具有一个精确的传输模型是可靠估计距离的前提。然而未知环境下,其信号的传输模型未知,因而其定位误差通常较大。
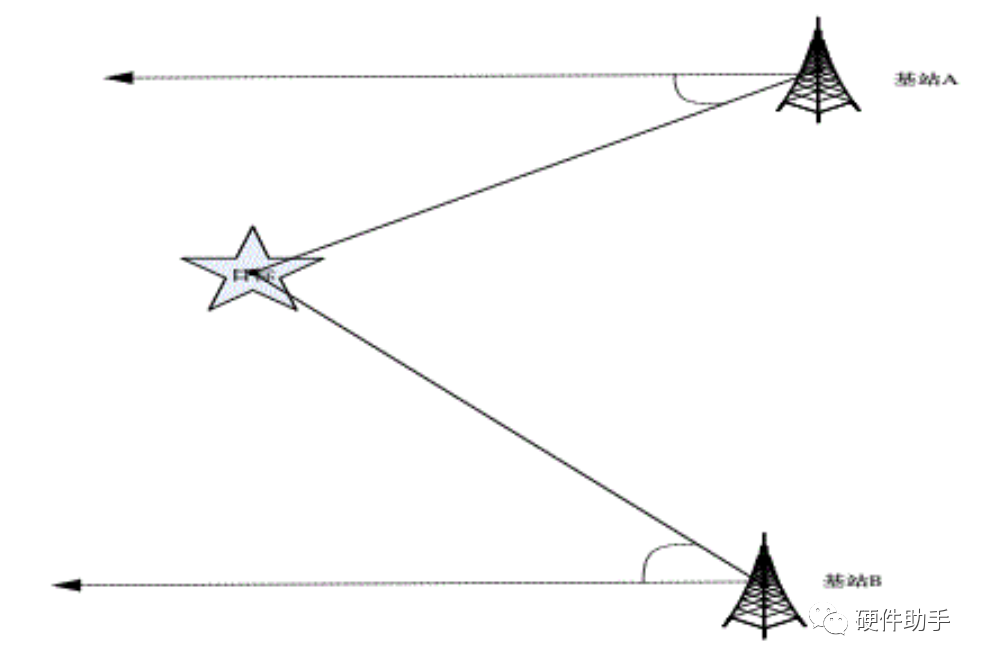
AOA定位是通过基站A和基站B的接收天线或天线阵列,分别测量出A、B与目标之间的角度值,该角度使接收机到移动台组成一条射线,该角度称为方位角,该射线称为方位线。使用两个或两个以上的AOA方位线,即可得出多条射线的交点,该交点几位待测目标的估计位置。
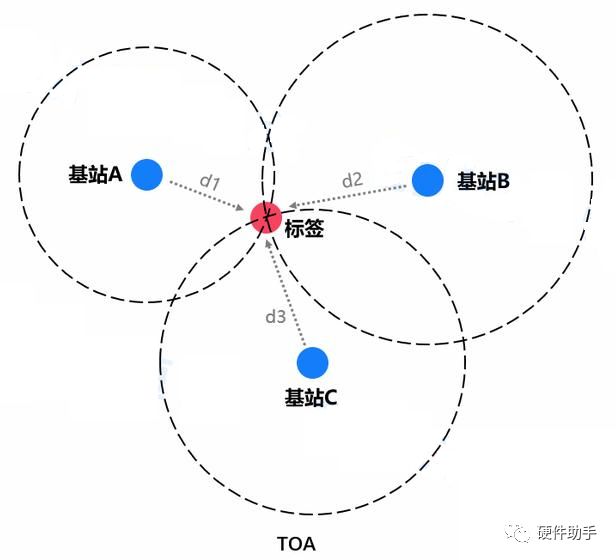
TOA定位法是通过获得N个位置已知的基站和待测目标之间的直线距离(测量两点之间的距离,主要有两种方法,一种是测量两点之间的传播时间(也就是TOF),另一种是测量到达信号的场强变化(也就是RSS)),根据几何原理实现定位。为了实现对待测目标的定位,在无先验知识的情况下,需要基站的数量至少为三个,以三个基站的位置坐标为圆心,他们分别与待测目标之间的距离为半径画圆,在无NLOS误差的情况下,待测目标必然在三个圆的交点上。
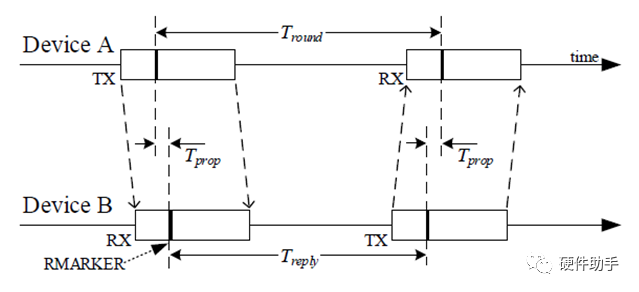
TOF的实现方式是需要目标和基站之间进行两次TOA估算,并减去中间处理时间得到目标和基站之间的往返时间。其定位原理和TOA相同,有点在于需要两个节点之间有共同的时钟。因为他是通过测量一个节点收发信息的往返时间来估计两点之间的距离。
由于TOF在实际应用中有各种各样的问题,比如由于设备B时钟源的自我偏差PPM会导致每次Tdelay的不一致性等等。因此TOF也有很多变种,比如RTOF(也叫TW-TOF或者DS-TWR)这种不需要同步的方式,也有TDOA这种需要系统有精确的时间同步功能。
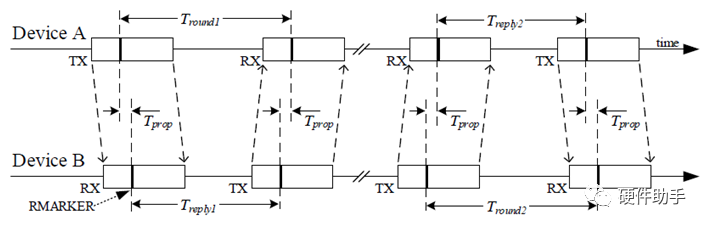
TW-TOF是TOF(也叫SS-TWR)的一种扩展测距方法,记录了两个往返的时间戳,最后得到飞行时间,虽然增加了响应的时间,但会降低测距误差。双边双向测距根据发送消息个数不同,分为两种方法:
- 4消息方式(4 messages)
- 3消息方式(3 messages)
双边双向测距4消息方式分为两次测距,设备A主动发起第一次测距消息,设备B响应,得到4个时间戳;然后过了一段时间,设备B主动发起测距,设备A响应,同样得到4个不同的时间戳。
双边双向测距3消息方式相比较于4消息方式,省掉了第二次测距的发起动作,当设备A收到数据之后,立刻返回数据,最终也可以得到四个时间差。
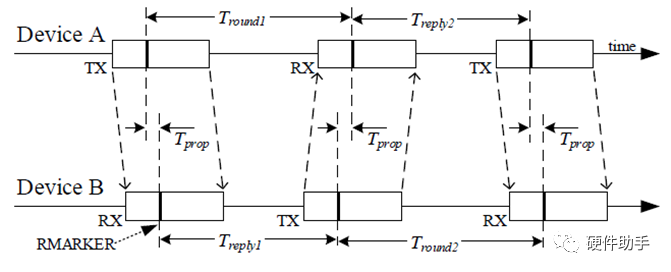
得到四个时间戳就可以根据下面的公式进行计算了:

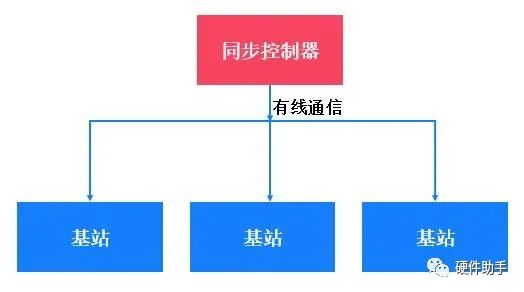
TDOA是基于到达时间差定位,系统中需要有精确时间同步功能。时间同步有两种:
一种是通过有线做时间同步,同步精度非常高,能控制到0.1ns,但由于采用有线,所有设备要么采用中心网络的方式,要么采用级联的方式,但增加了网络维护的复杂度,也增加了施工的复杂度,成本较高。并且,系统中还有一个专用的有线时间同步器,价格比较贵。
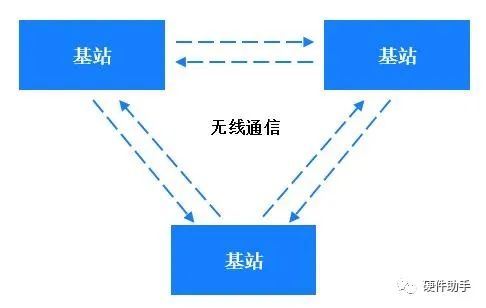
另一种是通过无线做时间同步,采用无线同步一般可以达到0.25ns,精度稍逊于有线时间同步,但其UWB定位系统相对来说更为简单,定位基站只需要供电,数据回传可以采用WiFi的方式,有效降低了成本。
TDOA定位不必要进行基站和移动终端之间的同步,而只需要基站之间进行同步。因为基站的位置是固定的,基站之间进行同步与基站和移动终端之间进行同步要容易实现得多。这使得TDOA定位比TOA定位要更加容易实现,所以TDOA定位的应用非常广泛。
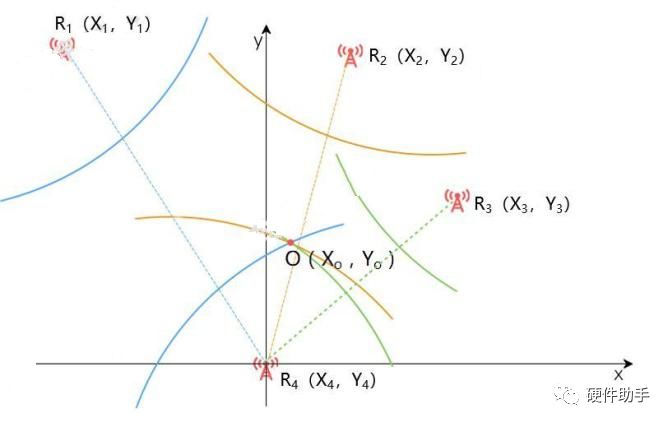
TDOA定位在二维定位中需要使用4个定位基站。基站时间同步之后,标签发送一个广播报文,基站收到之后,标记接收到此报文的时间戳,并将内容发送到计算服务器,计算服务器根据其他基站的定位报文的时间戳,计算出被定位目标的位置。
通过测量标签到每两个基站之间的距离差,距离差等于常量即可绘制出双曲线,而曲线交点即可确定标签坐标。该方法实现过程中,标签只需要广播一次UWB信号即可,因此有利于标签的功耗及标签并发数量。
-
RSS
+关注
关注
1文章
33浏览量
12345 -
UWB
+关注
关注
32文章
1100浏览量
61187 -
定位算法
+关注
关注
0文章
61浏览量
15003
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论