 基于xWR1443毫米波雷达的参数估计与微多普勒仿真(MATLAB)
基于xWR1443毫米波雷达的参数估计与微多普勒仿真(MATLAB)
本文首发于公众号【调皮连续波】,其他平台为自动同步,内容若不全或乱码,请前往公众号阅读。保持关注调皮哥,和1.5W雷达er一起学习雷达技术!
| 序号 | 类别 | 内容 | 文件路径 |
|---|---|---|---|
| 1 | 雷达代码 | 本文内容 | 根目录雷达代码库 |
【正文】
编辑|雷达小助理 审核|调皮哥
代码运行平台:MATLAB2022a
操作系统:Windows 10 专业版
文件目录:
1、参数设置
雷达的参数按照原始数据采集的参数来设置,本文的MATLAB仿真中设置的雷达参数如下所示,同时设定了距离维和速度维的坐标轴。
%% 参数设置n_chirps=128; %每帧脉冲数n_samples=256; %采样点数/脉冲N=256; %距离向FFT点数M=128; %多普勒向FFT点数fs=10e6; %采样率c=3.0e8; %采样率f0=77e9; %初始频率lambda=c/f0; %雷达信号波长d=lambda/2; %天线阵列间距Tc=50e-6; %单chirp周期Tf=40e-3; %帧周期B=1344.19e6; %信号带宽HzrangeRes=c/2/B*Tc/2*fs/N; %距离刻度Ts=0127*Tc; %快时间轴Ta=0255*Tf; %总时间轴Rr=0(N-1)*rangeRes; %距离轴Vr=(-M/2:M/2-1)*lambda/Tc/M/2; %速度轴
2、数据读取
数据读取采用TI官方提供的函数实现,在本文的仿真程序中采用readDCA1443()函数,得到4个接收通道的数据。
%% 数据读取fname='adc_data.bin'; %文件路径名称adcdata =readDCA1443(fname);n_frame=floor(length(adcdata)/n_chirps/n_samples); %数据总帧数data_rx1= reshape(adcdata(1,:),n_samples,n_chirps,n_frame); %RX1数据data_rx2= reshape(adcdata(2,:),n_samples,n_chirps,n_frame); %RX2数据data_rx3= reshape(adcdata(3,:),n_samples,n_chirps,n_frame); %RX3数据data_rx4= reshape(adcdata(4,:),n_samples,n_chirps,n_frame); %RX4数据%微多普勒数据profile=zeros(n_frame,n_chirps);
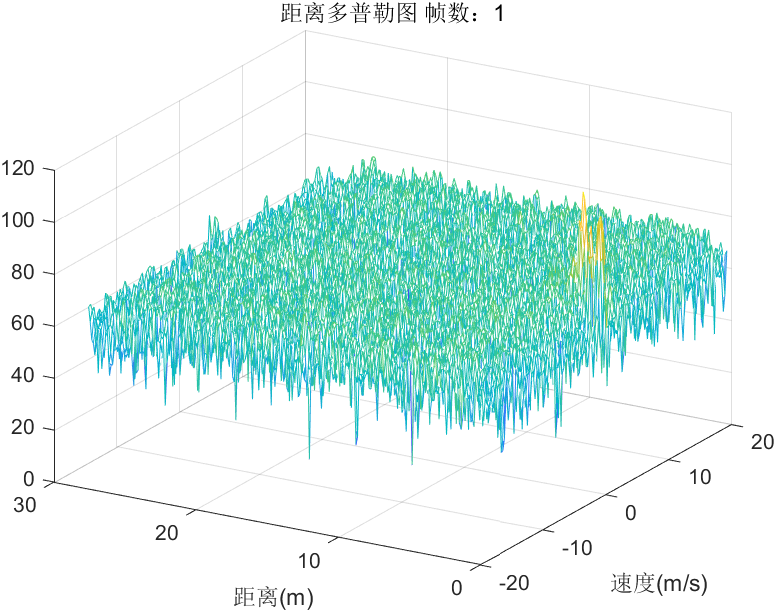
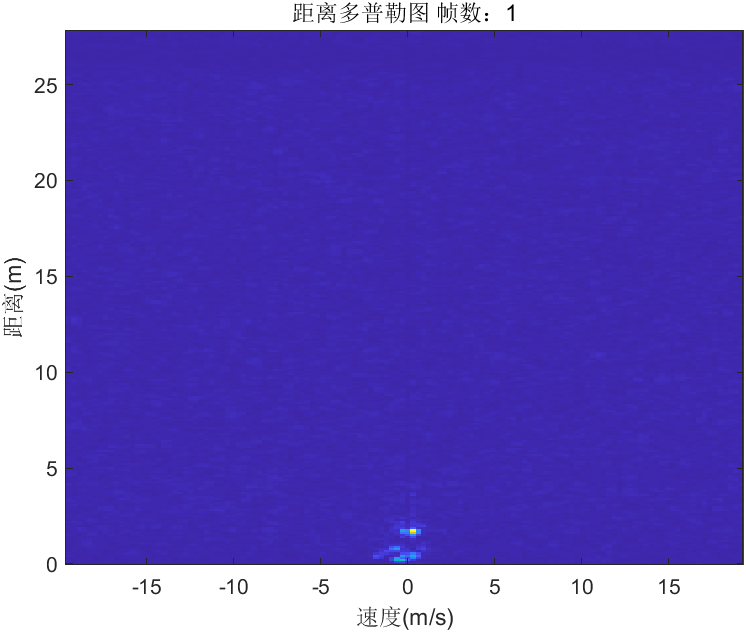
3、距离速度谱
利用距离维FFT和速度维FFT实现,其中在距离维FFT之前采用相量均值相消去除了零频,窗函数选择海明窗。仿真结果如下所示:
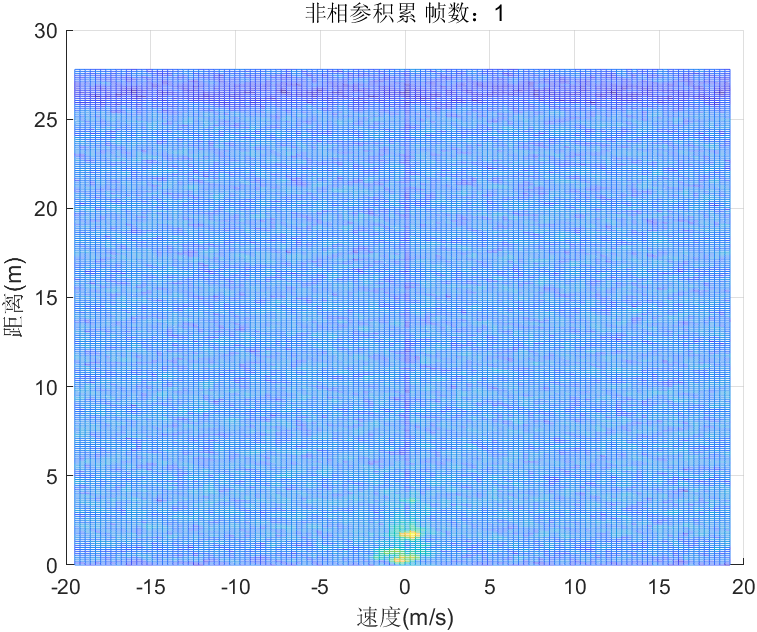
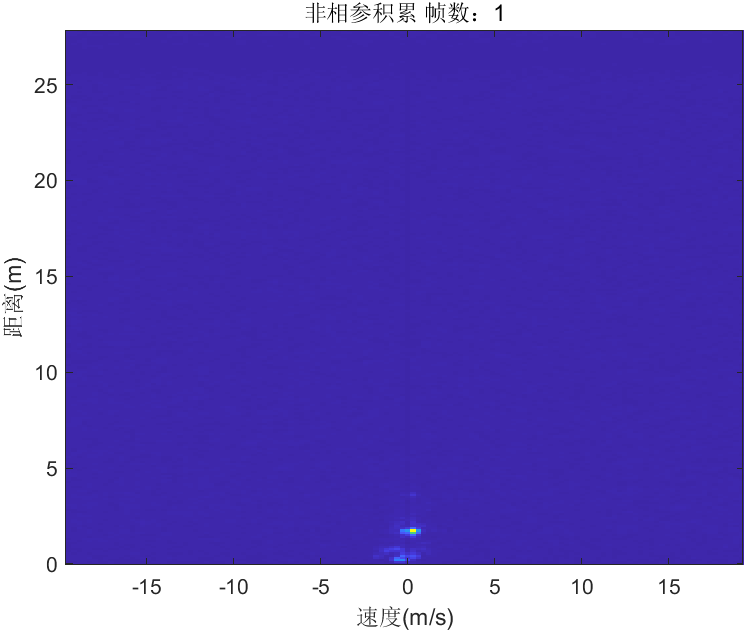
4、非相参积累
叠加四个通道的信号幅值,如下所示:
rx_2dfft=abs(rx1_2dfft)+abs(rx2_2dfft)+abs(rx3_2dfft)+abs(rx4_2dfft);
结果如下所示:
5、二维CFAR
CFAR参数根据雷达的分辨率等参数设定,本文仿真的参数设置如下所示,其中,虚警概率pfa =10^-6。
%通过完整的距离多普勒图滑动窗口%在两个维度中选择参考单元的数量Tr = 8;Td = 4;%选择被测单元(CUT)周围两个维度的保护单元数量,以进行准确CFAR检测Gr = 4;Gd = 2;
结果如下所示:

2D CFAR的算法执行效率较低,读者可以根据需求选择先进行速度维CFAR,然后再进行距离维CFAR。
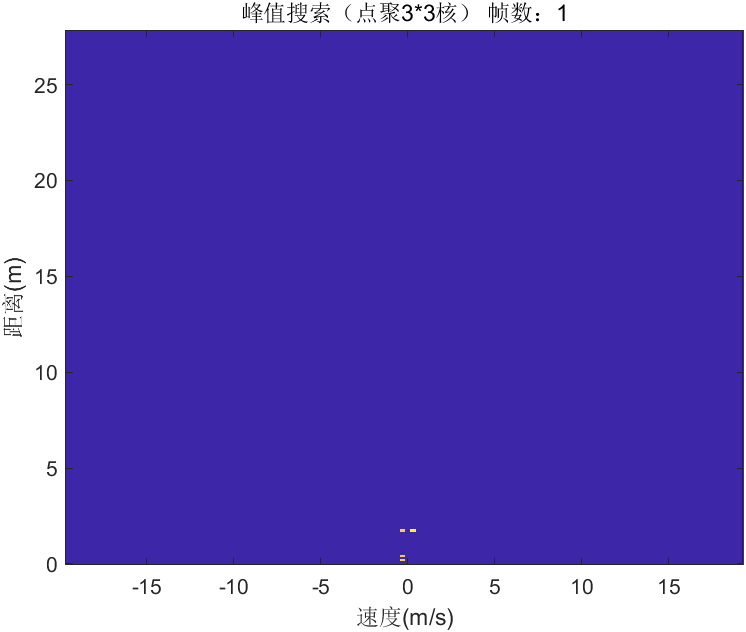
6、峰值搜索
首先建立检测矩阵,扩展补零,便于检测边界目标。
rx_2dcfar_temp=padarray(rx_2dcfar,[1,1],0); %建立检测矩阵,扩展补零,检测边界目标[r,c]=size(rx_2dcfar); %矩阵大小
建立3*3的滑窗,通过找出滑窗内最大的值及其坐标,用于后续提取峰值点。
for i=1:r %创建3*3滑窗,找出较滑窗内数据最大值,剩余用0覆盖for j=1:cif rx_2dcfar_temp(i+1,j+1)>0a=rx_2dcfar_temp(i:i+2,j:j+2); %创建3*3滑窗b=max(max(a)); %找出较滑窗内数据最大值[x,y]=find(a==max(max(a))); %找出较滑窗内数据最大值在滑窗内坐标temp=zeros(3,3); %创建3*3全0矩阵rx_2dcfar_temp(i:i+2,j:j+2)=temp; %用3*3全0矩阵覆盖检测矩阵内数据,代表检测矩阵数据检测完成temp(x,y)=b; %创建3*3全0保留最大值的矩阵rx_2dcfar_temp(i:i+2,j:j+2)=temp; %用上述矩阵覆盖数据矩阵内数据,endendendrx_2dcfar_plots=rx_2dcfar_temp(2:r+1,2:c+1);
效果如下所示:
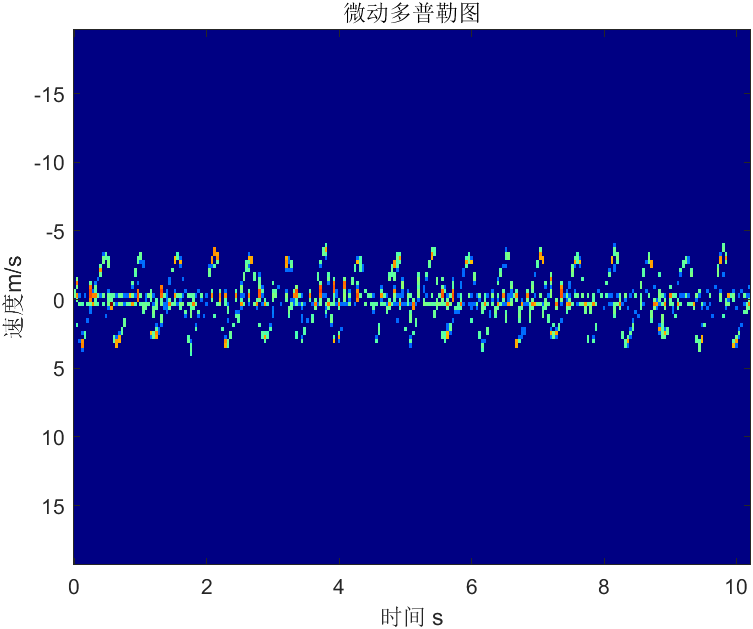
7、微多普勒
微多普勒提取没有采用STFT法,而是直接提取RD谱中的低速部分速度,作为微多普勒。这种方法比较简单,也能在一定程度上近似微多普勒,工程上比较实用。
但是这种方法需要精细确定目标检测点的距离门分布范围,否则会漏掉一些目标点。例如,下面的代码中,j代表距离门范围。直接将每一帧的目标速度叠加起来,最后就能够得到近似的微多普勒谱。
%微动多普勒forj=3:6profile(n,:)=profile(n,:)+ rx_2dcfar(j,:);end
仿真结果如下图所示:
8、角度估计
采用角度维FFT,角度估计的其他方法,比如DBF、Capon、MUSIC、压缩感知以及其他超分辨算法等,需要读者自行探索,公众号以往的一些文章也提到过一些,可以参考。
9、微多普勒速度时域包络
利用微多普勒频率fd乘以速度v ,可以得到fd*v =2(v^2)/λ,即得到了以2/λ为幅度系数的微多普勒速度包络v^2,也就是微多普勒速度的功率,如下图所示。
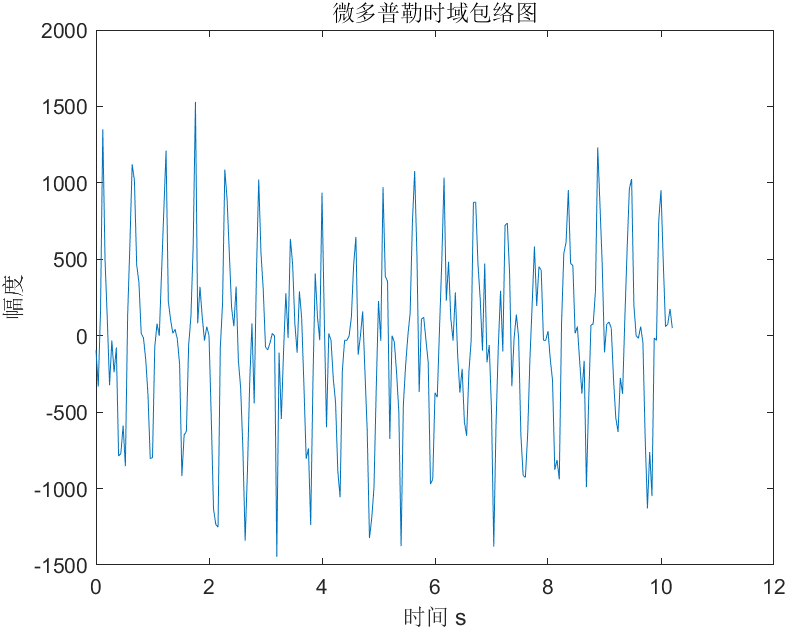
包络检波得到的是带通信号的基带部分,在本文中也就是微多普勒速度的时域信号。
10、微多普勒调制频谱图
微多普勒速度频域可以利用对微多普勒速度时域信号做FFT求得,而实信号FFT得到双边谱,如下图所示。
% 微动多普勒绘图profile=profile';figure(8)colormap(jet);imagesc(Ta,Vr,(profile));title('微动多普勒图');xlabel('时间 s');ylabel('速度m/s');profile_x=Vr*profile;%微动多普勒与速度乘积累加figure(9)plot(Ta,profile_x);xlabel('时间 s');ylabel('幅度');title("微多普勒时域包络图")profile_x=fftshift(fft(fftshift(profile_x,256))); %FFTFs=1/(Tf*256);F=(-128:127)*Fs; %频率轴figure(10)plot(F,(abs(profile_x)));title("微多普勒频域图");xlabel("频率 Hz");ylabel("幅值");
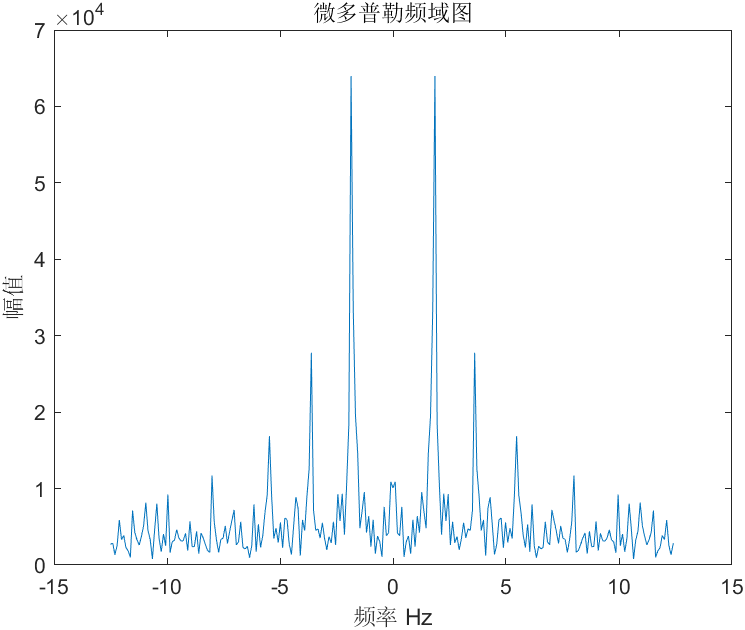
这个谱图的峰值表示,微多普勒频率,可以看到上图,峰值较强的有4个。
本文到此结束,年度会员直接查看公告目录,非会员可私信博主。
【点击以下链接可直达各个业务模块】
| 加入年度会员 | |
【本期结束】
本文是空闲时个人的心得体会,仅供参考。目前我还有很多内容需要学习,如果还有没有说到或者不全面的地方,还请指正,感谢大家。
喜欢本文,可以转发朋友圈。欢迎关注【调皮连续波】和备用号【跳频连续波】。
审核编辑黄宇
-
matlab
+关注
关注
185文章
2976浏览量
230478 -
仿真
+关注
关注
50文章
4082浏览量
133612 -
毫米波雷达
+关注
关注
107文章
1044浏览量
64371
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论