 先进雷达系统稳定性与IMU
先进雷达系统稳定性与IMU
电子发烧友网报道(文/李宁远)随着先进雷达系统的精度和分辨率呈指数级提升,独立阵列设计得越来越大,先进的雷达系统必须集成众多IMU系统以确保雷达升级后对更高性能的支持。
各种地面相控阵运动系统也是如此,随着射频频谱不断增高,相控阵系统的精度越来越高,系统需要集成各种惯性测量单元IMU、陀螺仪和加速度计来提高系统稳定性。
雷达定向技术提升
从1936年至今,由于电子技术和精确定位技术的不断发展,雷达的操作分辨率和瞄准能力已经有了极大地提升。定向技术发展到现在已经可以确定垂直和水平空间分辨率。在定向精度提升或者频谱提高时,分辨率会相应增高。比如多普勒雷达已经可以做到出色的速度分辨率,相对的,脉冲雷达在空间分辨率上更为优异。
这些都还只是基础的雷达,雷达技术的进步更多地体现在一些先进的应用上。比如3D气象雷达使用NextRAD技术绘制距离和高度风暴图、94-96GHz雷达可以在10公里处提供1厘米的分辨率以及人体扫描雷达的精准探测。这些先进雷达都基于天线的方向或天线上部分子阵列的方向来辨别目标的准确距离。
雷达发展挑战
当这些雷达搭载在可移动的设备上时,大大增加了这些设备的探测性能。但同时也对雷达定向系统提出了更高的要求。移动设备的偏航、俯仰、滚动都会影响到定向系统的准确性,而且因为同时存在三个加速轴,定向系统的校准也难度倍增。同时大量电子系统也会对雷达产生干扰。
这些雷达系统的精度已经变得非常高,非常精准,而且波束变得非常细微,此时需要非常精准的定向行进、方向、姿态加速度和移动等各方向的数据信息。不仅是整个阵列,大型阵列中的各个子部分也需要能够提供这些数据信息。也就是说,从各个子阵列到整个阵列,都需要非常准确的定向性能来实现电子增益。
高端民用雷达现在已经往多功能、多波束、多模式系统发展,机械雷达实现单一功能的方案已经跟不上发展的脚步。直接采样和数字波束成型的雷达将更有优势。而且这些雷达系统都需要极快的反应速度,依赖远程或系统IMU带来的延迟肯定是无法满足需求的,本地化的IMU信息将更加重要。
这种大型阵列往往需要使用多个惯性传感器,不只是单纯地进行定向,还需要将IMU用于测量该阵列中的弹性或偏差。可以说雷达的稳定性很大程度上取决于IMU系统能提供准确、及时的输入。
IMU辅助雷达系统提升稳定性
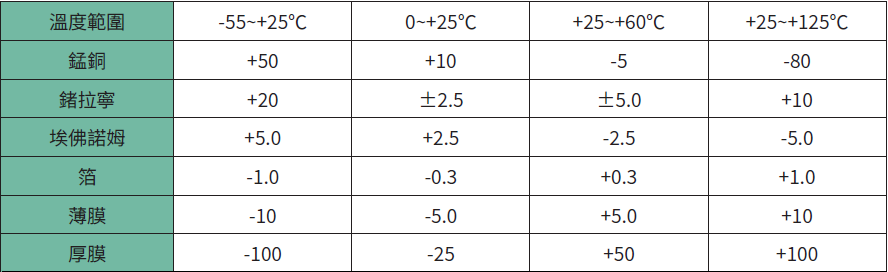
IMU可以集成进各种雷达的子系统中以提供稳定性反馈以支持定向应用,比如天线系统。使用IMU对天线进行倾斜检测,帮助实现小幅度的机械调整。在这种检测中,误差可能来自频谱密度、RMS、速度随机游走、偏移重复性、跨轴灵敏度等等方面,因此选用合适的IMU或加速度计就很重要。
对于大型的雷达相控阵这种场景,整个阵列中的薄板会出现高度弯曲使得整个系统的各个元件会保持不同的性能水平。此时在天线阵列的不同点放置IMU可以为系统提供补偿,以便补偿大型阵列中可能存在的相位延迟之间的差值。IMU此时既是控制回路的一部分,又反过来可用于调节平台的位置。
不管是动态环境还是静态环境,IMU的应用都能大幅提升雷达系统的稳定性。
小结
雷达定向技术的提升大幅提升了探测精度,运动解析技术的提升也将目标速度变化解析得更为精准,而这些高性能能否发挥出来的关键在于IMU能否提供及时准确的运动数据。先进雷达系统开始集成众多IMU生态系统,IMU已成为雷达稳定运行的关键传感设备。
-
雷达系统
+关注
关注
6文章
243浏览量
28638 -
IMU
+关注
关注
6文章
298浏览量
45667
发布评论请先 登录
相关推荐
质量视角下的系统稳定性保障--稳定性保障常态化自动化实践

凤凰动力舵轮驱动轮的稳定性如何影响AGV的运行效率和稳定性






 工商网监
工商网监
评论