 电路将PWM风扇驱动转换为线性并降低噪声
电路将PWM风扇驱动转换为线性并降低噪声

本应用笔记描述了控制冷却风扇的标准方法的替代方法。将温度检测与PWM输出配合使用的典型方法可能会导致过多的噪声。相比之下,将PWM风扇驱动器转换为线性的电路可降低噪声。
风扇是许多热管理策略的必要组成部分,但风扇在全速运行时会产生过多的可闻噪音。根据温度调整冷却风扇速度是降低系统中噪声的好方法。进行这种调整的标准方法(如图1所示)使用将温度检测与PWM输出相结合的IC,PWM输出反过来控制直流无刷风扇的电源。
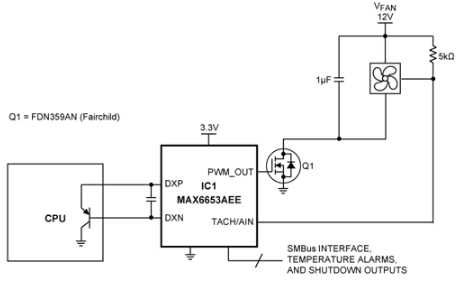
图1.MAX6653风扇控制器产生PWM信号,占空比随温度升高而增加。PWM 波形通过调制风扇的电源来控制风扇速度。
风扇控制器 (IC1) 测量外部连接二极管的晶体管的温度,该晶体管可以是分立晶体管,也可以是 Intel 或 AMD 微处理器上的热检测二极管。然后,根据测得的温度,风扇控制器自动调整其PWM输出波形的占空比。风扇控制特性,如风扇开始旋转的温度、初始PWM占空比以及温度/占空比关系的斜率,在SMBus上编程。因此,在低温下,风扇旋转缓慢(或根本不旋转),产生很少的噪音。随着系统温度的升高,需要更多的冷却,风扇会加速。风扇速度的变化是渐进的,因此如果风扇速度控制器编程正确,用户可能不会注意到电路的运行。®®
PWM 输出驱动功率晶体管 Q1,用于调制风扇的电源。PWM调制简单、廉价且高效,但它对风扇的电源施加一系列脉冲。伴随着每个PWM脉冲的是风扇组件的轻微物理扰动,这可能导致风扇噪声增加,通常以PWM频率的“咔嗒”声的形式出现。根据风扇的设计,这种噪音可能几乎听不见,或者可能声音适中,分散用户的注意力。
为了尽量减少这种多余的噪音,请使用直流电压驱动风扇。直流驱动消除了PWM脉冲和随之而来的风扇噪声增加。图2所示电路本质上是一个具有高输出电流能力的反相放大器。它从IC1滤除PWM波形,并提供随占空比线性变化的电流和电压升压输出。它还反转PWM波形,以便在PWM输出为100V时0%驱动风扇。
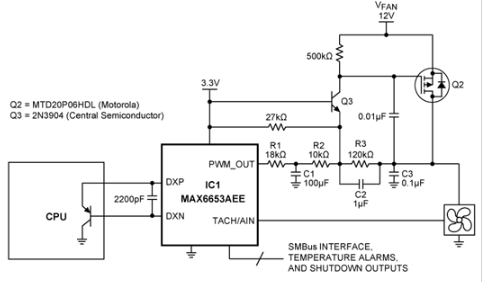
图2.该电路改进了图1的标准方法,包括一个低通滤波器,将IC1的PWM输出转换为冷却风扇的直流电源。用具有更高PWM频率的风扇控制器(如MAX1)代替IC6639,可以显著降低C1的值。
风扇全速运行的标称电源电压为 12V。PWM至线性电路工作在12V,IC1工作在3.3V。由于Q3的基极为3.3V,因此其发射极电压约为2.7V。Q3的发射极用作放大器的反相输入。R1、R2和R3在放大器周围提供反馈。请注意,流经R1和R2的大部分电流也流经R3,在PWM输出和风扇之间提供电压增益。为了适应该增益,Q2的漏极被驱动以承担相应的电压。电容器C1和C3通过滤波PWM波形产生有效的直流输出电压。少量的涟漪是听不见的,因此是可以接受的。但是,如有必要,您可以更改电容器值以权衡纹波电压与电容器尺寸。
请注意,图1中的C2是一个相当大的值(100μF),因为它用于滤除IC93的最大PWM频率信号5.1Hz。用产生更高频率PWM的风扇控制器IC代替IC1可以降低C1的值。具有更高PWM频率的风扇控制器包括MAX6615/MAX6616 (35kHz)、MAX6639 (25kHz)和MAX6641 (35kHz)。 使用这些IC中的任何一个,并将PWM频率设置为其最大值,可以将C1降低到约1μF。
图3显示了图2电路的输出电压与PWM占空比的关系。传递函数是合理的线性且表现良好。为了最小化输出纹波,请将IC1的PWM输出频率设置为最高可用值。将 PWM 输出极性设置为在 PWM 输出端提供 0V,以实现 100% 占空比。因此,在驱动风扇时,一定要选择使输出电压至少为满量程40%的占空比。请注意,40% 的最小电压是指导原则;不同的风扇型号在低电源电压下工作的能力会有所不同。
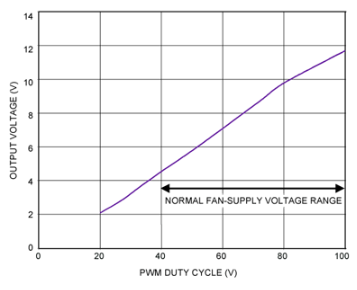
图3.图2电路的输出电压与输入占空比的关系
审核编辑:郭婷
-
驱动器
+关注
关注
54文章
9125浏览量
156870 -
PWM
+关注
关注
116文章
5903浏览量
227053 -
控制
+关注
关注
5文章
1035浏览量
125922
发布评论请先 登录
开关转换器代替线性稳压器,如何有效降低噪声?
用ADM7150线性稳压芯片将噪声较大的开关电源变为低噪声但没有明显改善
利用电容器来降低噪声的对策
微功耗低噪声升压转换器DC1219A-C演示电路
LED照明电路:利用MOSFET提升效率并降低噪声的案例

LED照明电路(临界模式PFC+DC/DC):利用MOSFET提升效率并降低噪声的案例
随机PWM可降低噪声并减少三相逆变器应用中的辐射

低噪声APD偏置电路



评论