 一文看尽SLAM创新点的前世今生
一文看尽SLAM创新点的前世今生
将一个机器人放入未知环境中的未知位置,是否有办法让机器人一边逐步描绘出此环境完全的地图,同时一边决定机器人应该往哪个方向行进?
SLAM(simultaneous localization and mapping)全称即时定位与地图构建或并发建图与定位,它主要的作用就是让机器人在未知的环境中,完成定位(Localization),建图(Mapping)和路径规划(Navigation)。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。目前,SLAM技术被广泛运用于机器人、无人机、无人驾驶、AR、VR等领域。
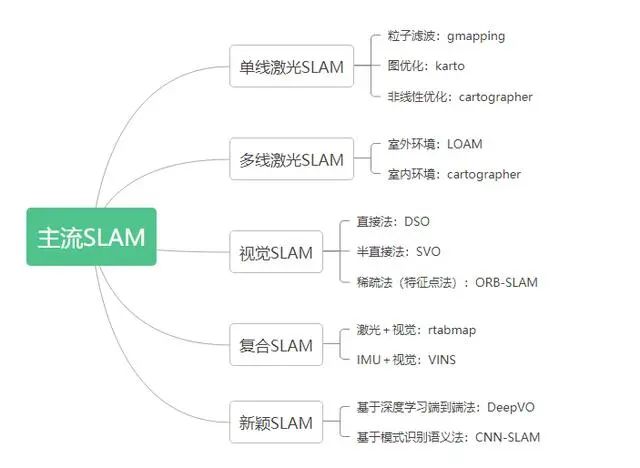
主流的slam技术应用有两种,分别是激光slam(基于激光雷达lidar来建图导航)和视觉slam(vslam,基于单/双目摄像头视觉建图导航)。
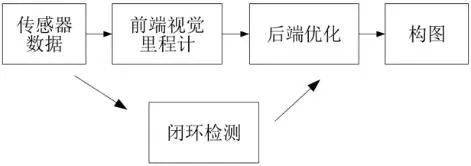
经典的SLAM系统一般包含前端视觉里程计、后端优化、闭环检测和构图四个主要部分。
很多同学都觉得Slam方向难以入门,也难以学深。但其实相对来讲,不像其他很多方向,很多的东西大家都已经做了,并且做的很不错,要想发论文或者找创意突破比较吃力。slam方向还有很多深层次的多领域结合应用的内容还比较少,并且slam更深的内容还有很多东西需要做。
在机器人slam、无线感知、多模态融合、智能视觉领域有深厚落地经验的Wills老师,将系统性为大家讲解机器人导航相关技术,并带大家分析slam创新点的前世今生。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28524浏览量
207553 -
SLAM
+关注
关注
23文章
425浏览量
31865 -
激光雷达
+关注
关注
968文章
3991浏览量
190082
原文标题:一文看尽SLAM创新点的前世今生
文章出处:【微信号:CVer,微信公众号:CVer】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
安泰功率放大器应用:纳米材料的前世今生
,因此在各个领域具有广泛的应用前景。那么你知道纳米材料是如何被发现,又是如何走入我们的生活,获得长足发展的吗?今天Aigtek安泰电子带大家详细了解一下。 纳米材料的前世今生 1861年,随着胶体化学的建立,科学家们开始了对直径
一种基于MASt3R的实时稠密SLAM系统
本文提出了一种即插即用的单目SLAM系统,能够在15FPS的帧率下生成全局一致的位姿和稠密几何图形。 01 本文核心内容 视觉SLAM乃是当今机器人技术与增强现实产品的基础性构建模
利用VLM和MLLMs实现SLAM语义增强
语义同步定位与建图(SLAM)系统在对邻近的语义相似物体进行建图时面临困境,特别是在复杂的室内环境中。本文提出了一种面向对象SLAM的语义增强(SEO-SLAM)的新型


深入了解Java泛型——从前世今生到PECS原则
本文主要介绍泛型诞生的前世今生,特性,以及著名PECS原则的由来。 在日常开发中,必不可少的会使用到泛型,这个过程中经常会出现类似“为什么这样会编译报错?”,“为什么这个列表无法添加

MG-SLAM:融合结构化线特征优化高斯SLAM算法
信息和提供准确的全局重建方面表现出显著的进步,而传统系统则基于稀疏点云或体素。然而,NeRF 方法仍然存在过度平滑、场景表示受限和计算效率低下等缺点。最近,基于高斯的 SLAM已成为一种利用体积辐射场

从算法角度看 SLAM(第 2 部分)
作者: Aswin S Babu 正如我们在[第 1 部分]中所讨论的,SLAM 是指在无地图区域中估计机器人车辆的位置,同时逐步绘制该区域地图的过程。根据使用的主要技术,SLAM 算法可分为三种


如何提取、匹配图像特征点
我们习惯从图像中选取比较有代表性的点,然后,在此基础上,讨论相机位姿估计问题,以及这些点的定位问题。
在经典 SLAM 模型中,把它们称为路标,而在视觉 SLAM 中,路标则是指
从一个锚点到一座港湾:华为加速“巨幕手机”时代到来
“巨幕手机”进入万元级时代,千帆过尽处,蓝海在舟前;从技术上看,华为在电视交互技术上的创新,为行业探明了技术迭代的实现方式,解决了行业面临的最大技术痛点。
什么是SLAM?SLAM算法涉及的4要素
SLAM技术可以应用在无人驾驶汽车、无人机、机器人、虚拟现实等领域中,为这些领域的发展提供了支持。SLAM技术的发展已经逐渐从单纯的定位和地图构建转向了基于场景理解的功能。
发表于 04-04 11:50
•2521次阅读
什么是SLAM?基于3D高斯辐射场的SLAM优势分析
基于NeRF的SLAM算法采用全局地图和图像重建损失函数,通过可微分渲染捕获稠密的光度信息,具有高保真度。
从基本原理到应用的SLAM技术深度解析
LSD-SLAM 即 Large-Scale Direct SLAM,兼容单目相机和双目相机。LSD-SLAM是一种基于光流跟踪的直接法SLAM
发表于 02-26 09:41
•9446次阅读

FPGA中竞争与冒险的前世今生
连线和逻辑单元时,都有一定的延时。 延时的大小与连线的长短和逻辑单元的数目有关 同时还受器件的制造工艺、工作电压、温度等条件的影响 信号的高低电平转换也需要一定的过渡时间 。由于以上存在的因素,多路信号
发表于 02-21 16:26





 工商网监
工商网监
评论