 如何利用PLC实现简单的搬运动作
如何利用PLC实现简单的搬运动作
一、三菱PLC指示灯的含义
今天咱们来谈一谈如何利用PLC来实现简单的搬运动作。这个例子完美地用到了顺序控制的指令,实际应用起来真的是非常方便,程序循环控制起来也是得心应手!
废话不多说,进入我们今天的主题!
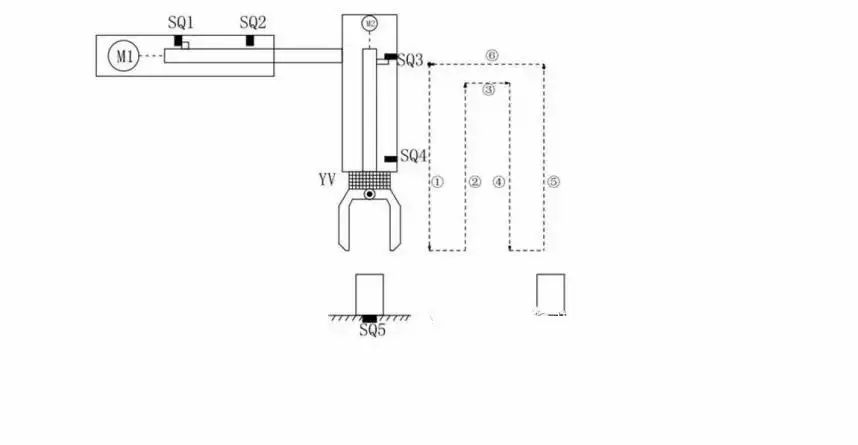
简易机械手结构图如图所示
M1为控制机械手左右移动的电动机
M2为控制机械手上下升降的电动机
YV线圈用来控制机械手夹紧防松
SQ1为左到位检测开关
SQ2为右到位检测开关
SQ3为上到位检测开关
SQ4为下到位检测开关
SQ5为工件检测开关
简易机械手的控制要求如下:
机械手要将工件从工位A移到工位B 处;
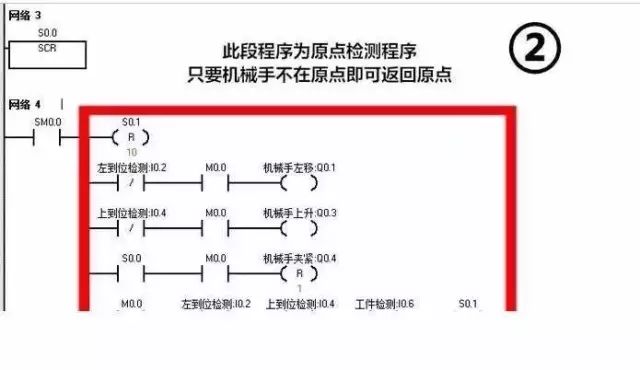
机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
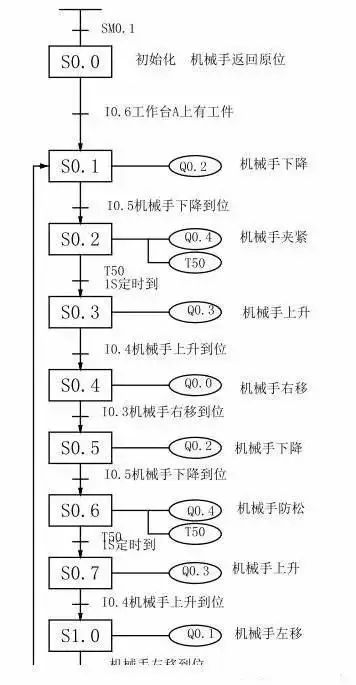
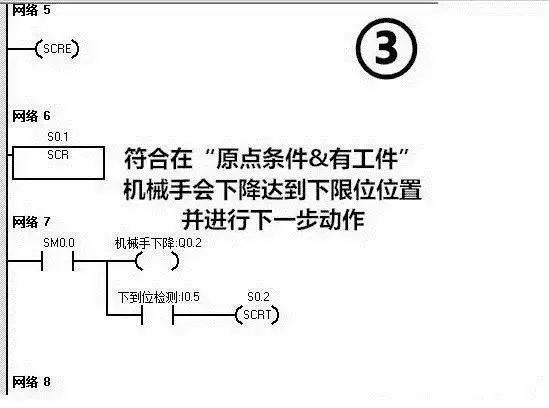
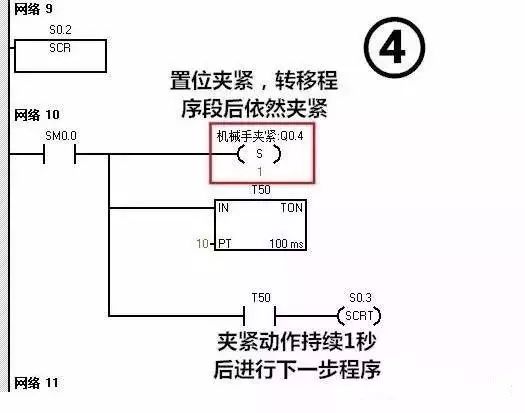
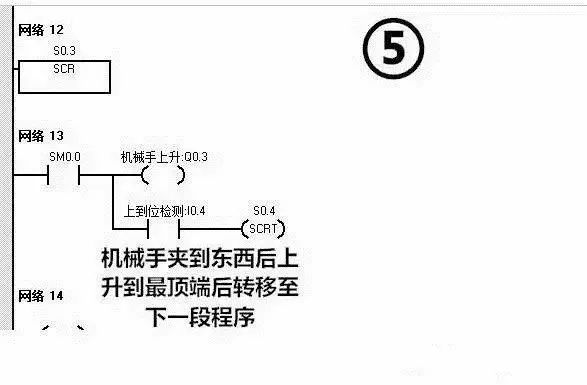
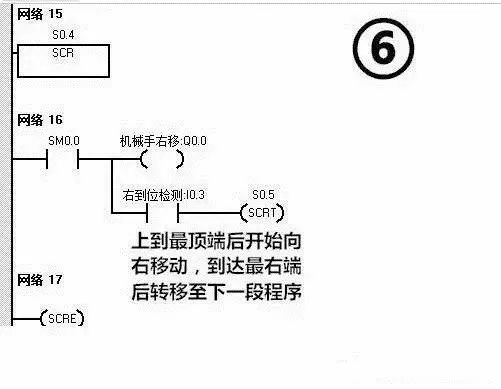
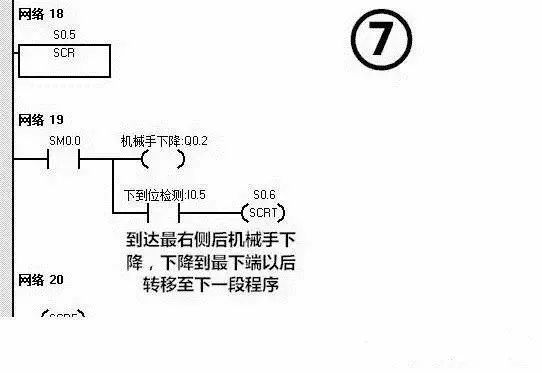
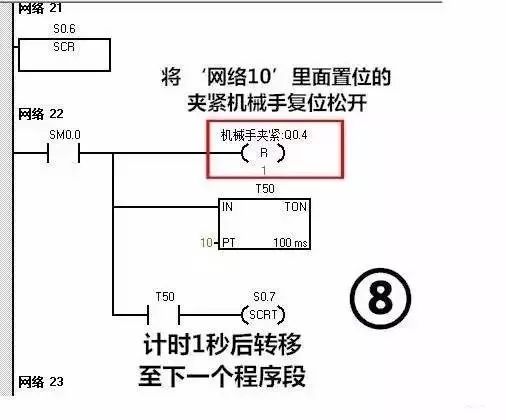
若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→放松→上升→左移→原点”的步骤工作。
动作图编程前理顺动作如何转移:
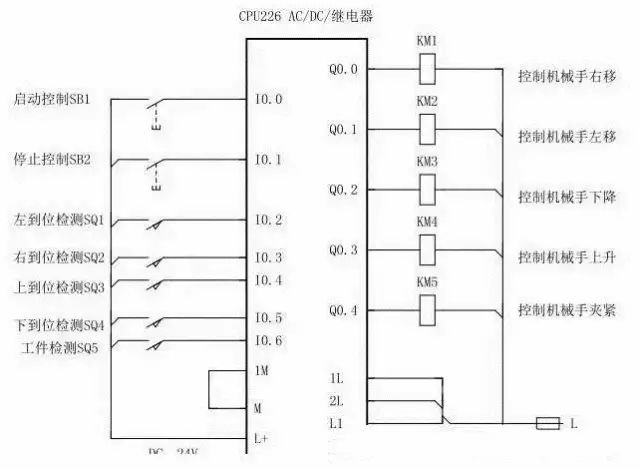
定义符号表:

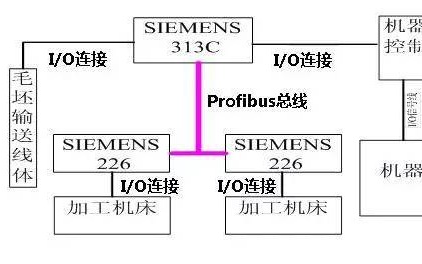
硬件的接线图:
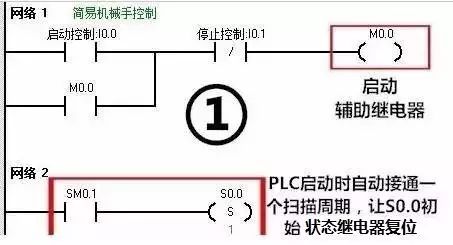
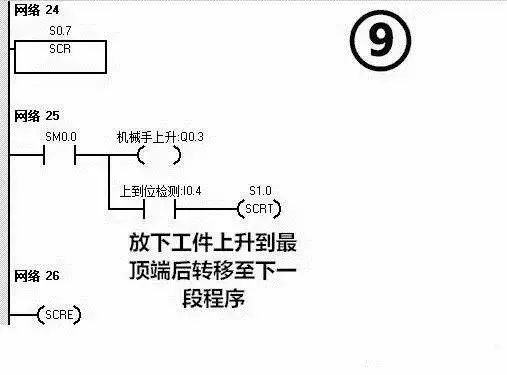
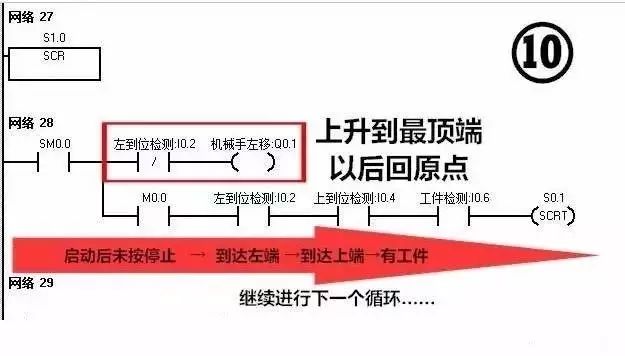
满足所有动作的程序如下:

一大堆梯形图看着真是眼花缭乱,不用担心我们一段一段分析分析这个机械手是如何工作的!
其实这个图没有那么多的并行分支,所以转移起来逻辑非常简单!
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
plc
+关注
关注
5011文章
13290浏览量
463263 -
电动机
+关注
关注
74文章
4110浏览量
96282 -
三菱
+关注
关注
32文章
803浏览量
42806 -
指令
+关注
关注
1文章
607浏览量
35707 -
顺序控制
+关注
关注
2文章
26浏览量
10730
原文标题:干货分享 | 如何利用PLC实现简单的搬运动作,都在这里了!
文章出处:【微信号:指南车机器人科技,微信公众号:指南车机器人科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
如何利用PLC来实现简单的搬运动作?
今天咱们来谈一谈如何利用PLC来实现简单的搬运动作,让机械为人服务!这个例子完美的用到了顺序控制的指令,实际应用起来真的是非常方便,程序循环
发表于 11-02 10:52
•668次阅读
[国产PLC]耐特生产PLC在水泥搬运机的运用优势
电机,与若干滚筒。由两个步进马达的主动轮带动滚筒的从动轮,带动输送带实现运输动作。设有两对光电传感器,计数作用。软件上运用耐特PLC,设计了自动运作计算功能,以及人员自动排班系统和断电数据保存功能三
发表于 01-15 10:33
机器人搬运码垛工作站介绍
ZNRGZ-4机器人搬运码垛工作站一、产品概述ZNRGZ-4机器人搬运码垛工作站以工业机器人与机器视觉为核心,将机械、气动、运动控制、PLC控制技术有机地进行整合,结构模块化,便于组合
发表于 07-01 08:20
AGV小车如何实现无人搬运自动导引代替人工
行业背景工业4.0技术是未来企业必须拥有的技术,未来AGV无人搬运不只是简单的把货物搬运到指定的位置,而是要把大数据、物联网、云计算等贯穿于产品的设计中,让AGV搬运机器人成为一种实时
发表于 09-05 19:29
工业机器人与PLC的通讯连接方式和控制方法
工业机器人真正的应用是用在生产线上(如汽车组装生产线、半导体硅片搬运等),机器人单机各种搬运动作轨迹等都调试好了,还要配合生产线上的动作要求,也就是还要和PLC连接进行通讯,双方交互信

如何利用PLC云网关实现PLC远程调试?
随着信息化的发展,越来越多的企业开始使用PLC云网关来实现PLC远程调试。PLC云网关是一种新型的网络技术,可以实现

PLC实例:顺序控制指令,实现搬运动作
今天咱们来谈一谈如何利用PLC来实现简单的搬运动作。这个例子完美地用到了顺序控制的指令,实际应用起来真的是非常方便,程序循环控制起来也是得心

运动控制卡与PLC的区别
PLC专长在于逻辑IO控制 而运动控制卡就跟专业伺服电机的控制对运动而已他的指令很简单控制的方式更多齿轮,插补,凸轮等但在IO处理起来就不像有PLC
发表于 06-29 14:13
•2315次阅读
通过PLC和遥控器实现搬运平车的运动控制
在网上看到搬运平车的介绍,搬运平车的运动控制是通过PLC和遥控器结合来控制实现的,自己就想着尝试自己写下程序来

PLC、运动控制卡、运动控制器,怎么区分?如何选用?
的发展,工业机器人应用越来越广泛,PLC也不再是简单的可编程逻辑控制器,各个品牌厂家都推出了自己的运动控制型PLC,来实现一些

如何利用PLC来实现简单的搬运动作
一大堆梯形图看着真是眼花缭乱,不用担心我们一段一段分析分析这个机械手是如何工作的!
其实这个图没有那么多的并行分支,所以转移起来逻辑非常简单!
发表于 10-31 18:26
•483次阅读

PLC编程案例之控制机械手实现简单搬运流程
很多人希望多分享一些PLC具体应用和维护的案例,满足大家的要求。今天咱们来谈一谈如何利用PLC来实现简单的






 工商网监
工商网监
评论