 KUKA机器人DECL 声明程序和数据列表中的变量和常量V5.9
KUKA机器人DECL 声明程序和数据列表中的变量和常量V5.9

在程序中使用的变量必须是在声明中公告的名字和数据类型。简单的、复杂的和随意的可定义的数据类型是可用的。声明首先由关键字DECL 开始,跟随数据类型和变量列表和数组已有的数据类型。当声明预先确定类型的变量和数组,关键字DECL 可被省略。除简单数据类型INT ,REAL ,CHAR 和BOOL 外,数据类型POS ,EPOS,FRAME ,AXIS,EAXIS etc中都被预先确定。声明能被数据类型为POS 的变量省略,因为这个数据类型是标准的数据类型而且是默认的分配。关键字DECL 可能被用户定义结构声明或列举类型忽略。
数组声明
就像变量,任何数据类能用于数组。增加数据类型和数组名,数组大小和尺寸必须也被数组公告。尺寸由指定数组大小的数决定。它最大为3。数组的大小出现在方括号中的数组名逗号分隔之后。任何一个数组的大小是无符号的整数。它必须等于或大于1 。
如果数组被作为子程序或函数的参数形式传送,就像变量一样它必须被在这个子程序或
函数的定义中公告。数组的大小必须在这个声明中被忽略但是方括号和逗号决定数组的
尺寸。当调用子程序和函数时,数组的大小时由分配当前的参数转换决定。.
声明变量与默认的设置
变量能在数据列表中公告和像默认相同的时间一样分配最初的值。声明语句包含的默认设置不能在程序和函数的声明部分使用。
在简单数据变量的情况下,最初的值作为简单的常量指定。通过结构变量,最初的值是一个集合。
声明语句在开始时给变量分配默认的设置,就像简单的声明由关键字DECL 分配变量名和数据类型以默认设置。
“ =” 符号和最初的值以常量的形式跟随变量名。当声明默认的设置,你不能在声明语句中列出多个变量。一个单独的声明语句是任何一个变量被分配默认设置的所必须的。当分配默认设置时,关键字DECL 可被忽略。
“=”符号右面的常量数据类型必须与左面指定的数据类型兼容但是并不必须完全一致。
如果数据类型兼容,系统自动作为常量匹配它们。
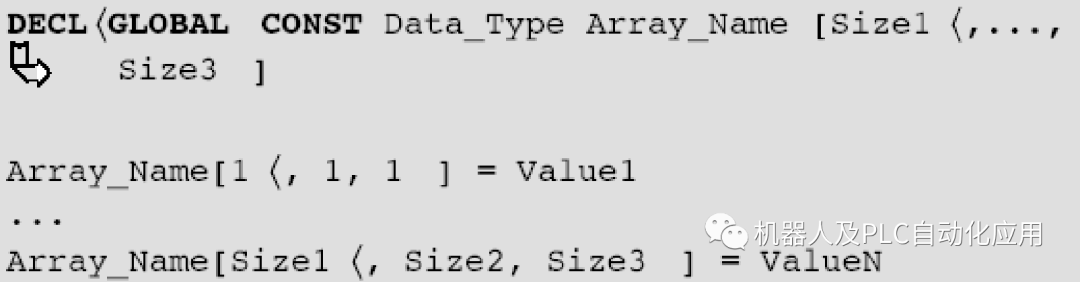
声明数组与默认设置
声明语句包含的默认设置不能在程序和功能的声明部分使用。也不能在数据列表声明和初始化中单个排列。
当在数组中声明默认设置,独立的语句必须写入任何一个数组元素。
数组默认设置的声明最少包含两块:
第一块包含由DECL. 声明的标准数组声明。
第二块包含数组元素的说明并通过“=”号和数组元素的初始值跟随。
在默认设置中更多的这个类型块被分配可跟随的其他数组元素。
当分配比数组元素更多的默认设置,元素必须在升序排列的数组索引中被指定。
“=”符号右面的常量数据类型必须与左面指定的数据类型兼容但是并不必须完全一致。如果数据类型兼容,系统自动作为常量匹配它们。
作为默认分配字符行
如果你想默认分配相同的字符串作为数组元素的类型字符行,你不是必须单独的分配它的每一个数组元素。数组索引的有指针可被省略,而且常量字符串作为默认设置分配到一个完整的行。
变量数据类型“Freely ” 声明可定义为结构类型或列举类型。
如果之后数据类型名不是预先确定的系统数据类型,关键字DECL必须在这里被编程。数据类型定义STRUC和ENUM 必须总是在DECL声明的这个类型变量之后。
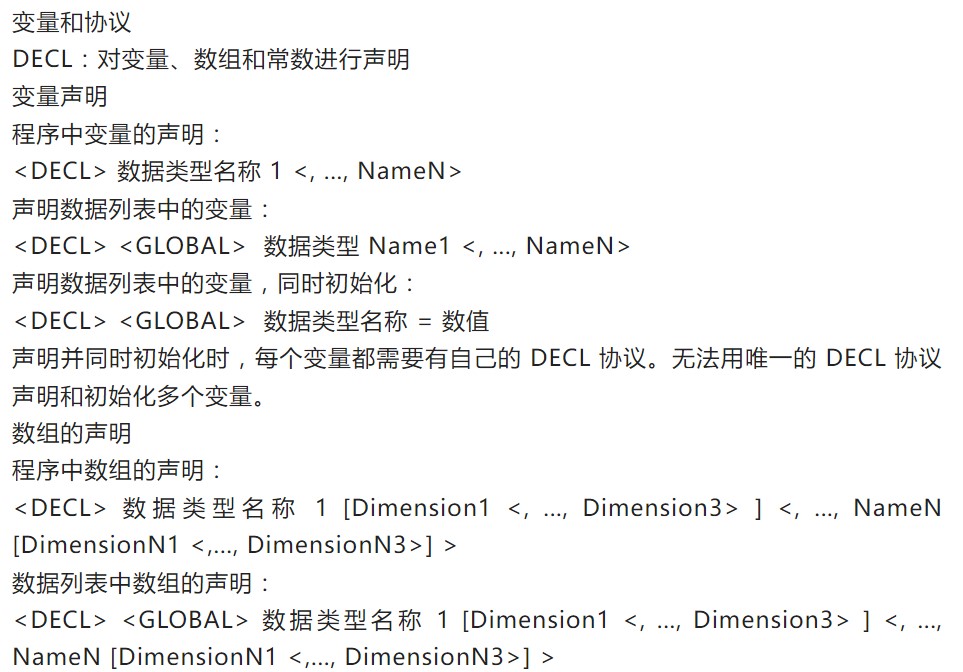
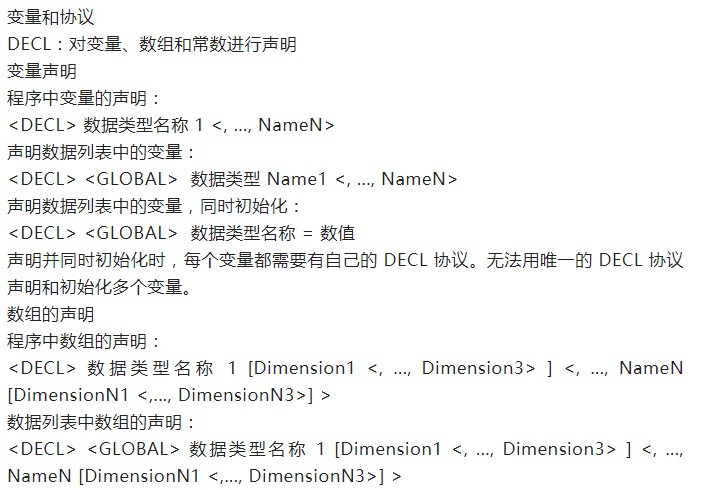
声明程序中的变量:

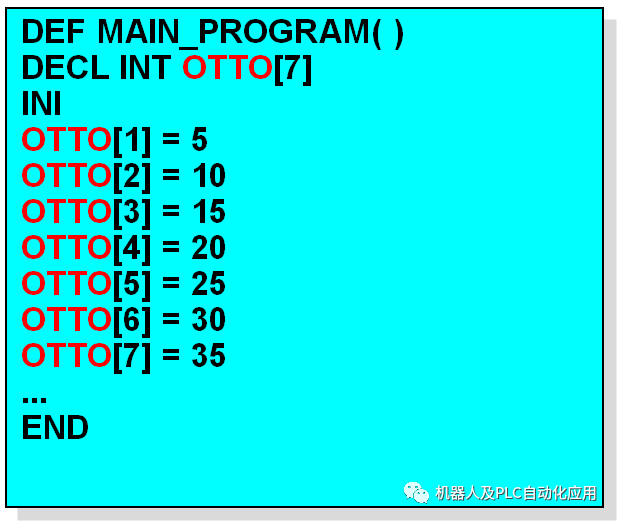
声明程序中的数组 :

声明数据列表中的变量:

或者同时分配值:

声明数据列表中的数组:

声明和初始化数据列表中的常量:

声明和初始化数据列表中的数组:
范例:
声明没有初始化。
DECL POS P1
;关键字DECL可被省略
INT A1,A2
REAL VEL[7],ACC[7],B
DECL S_PAR_TYPE S_PAR[3]
由默认设置声明数组( 只在数据列表中).
INT A[7] ;数组的7 个整数值
A[1]=27 ;第一个数组元素被分配为27
A[2]=313
A[6]=11
CHAR TEXT1[80]
TEXT1[ ]=”Message Text”
CHAR TEXT2[2,80]
TEXT2[1,]=”First Message Text”
TEXT2[2,]=”Second Message Text”
声明变量的初始化( 只在数据列表中).
FRAME F1={X 123.4, Y -56.7, Z 89.56}
审核编辑 :李倩
-
机器人
+关注
关注
211文章
28409浏览量
207026 -
变量
+关注
关注
0文章
613浏览量
28365 -
数据类型
+关注
关注
0文章
236浏览量
13623
原文标题:KUKA 机器人DECL 声明程序和数据列表中的变量和常量V5.9
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
KUKA机器人问题解答
库卡KUKA机器人四种启动方式介绍
KUKA焊接机器人伺服电机常见故障及维修处理
库卡机器人MGV电源模块维修
KUKA机器人如何声明变量
KUKA机器人 RESUME:中止中断程序解读
KUKA机器人-结构化机器人程序V5.9

KUKA机器人系统变量$PRO_NAME所选程序的名称(参考解释器)
读取机器人程序中的变量







 工商网监
工商网监
评论