 KUKA机器人-结构化机器人程序V5.9
KUKA机器人-结构化机器人程序V5.9
KRL 是一种类似PASCAL的高级编程语言,利用KRL语言编程能够实现结构化编程处理复杂的任务。一个KRL程序通常由一个SRC源文件和一个DAT数据文件组成,两个文件名字相同,扩展名不同,在专家界面下显示两个独立文件,在普通用户界面下显示一个模块。DEF...END 程序和子程序的声明。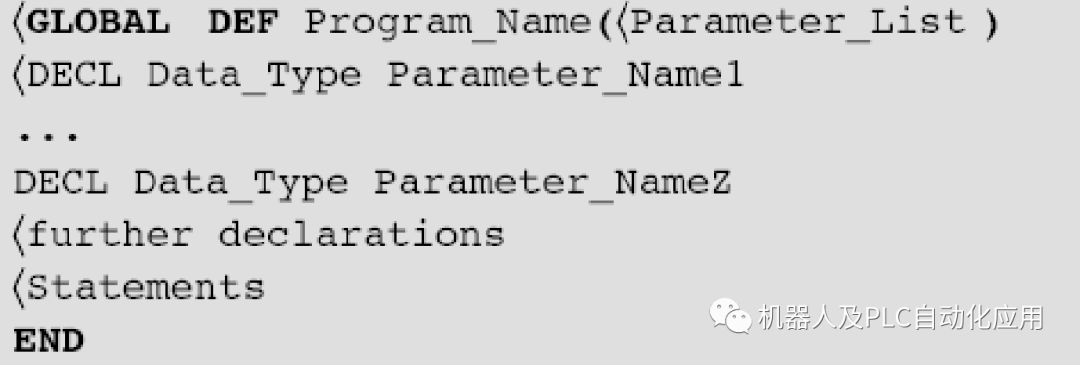
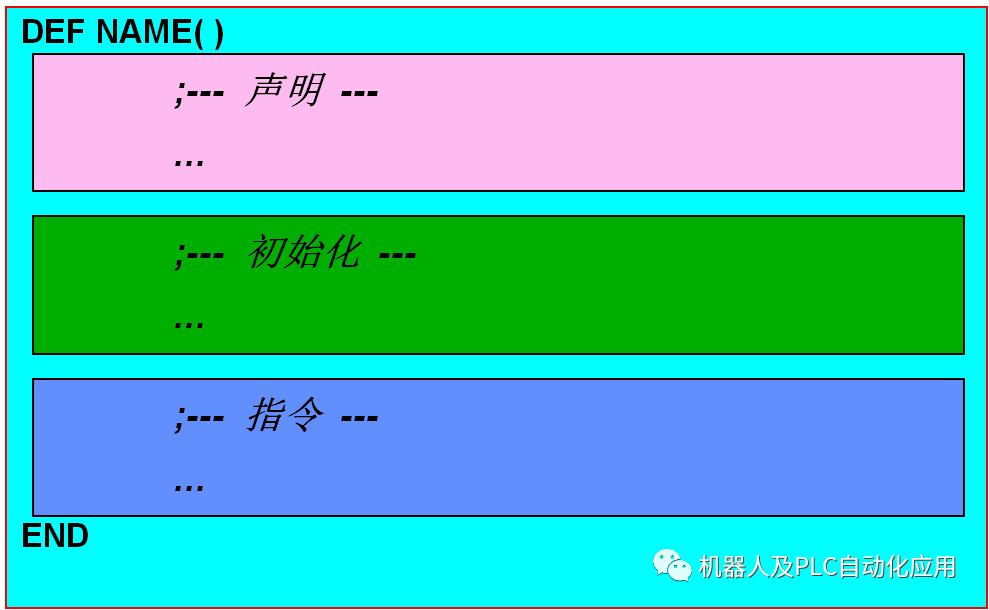 在文件开头用“DEF”进行标识
在文件开头用“DEF”进行标识
通过默认,SRC文件中的第一个程序与SRC文有同样的名字并认为全局有效,甚至没有关键字GLOBAL。
当程序被唤醒,有两种参数传送:传送输入参数和传送输出参数。
输出参数( 关键字IN)
变量的值被传送到这儿。直接的参数传送工作就像在子程序中分配默认设置到变量。通常传送的值可以是常量,变量函数,简单或复杂的表达式。
一个值在IN参数的情况下不能返回调入的指令( 由值唤醒) 。它仅仅由于赋一个值到子程序。
I 如果当前的数据类型和外部的IN参数不同但兼容,系统自动转化被传送的值的类型。数组不能像输入参数一样被传送 ( IN) 。
输出参数( 关键字OUT)
变量名被传送到这儿(有参数唤醒)。变量在调用子程序时必须有一个值。这个值能被子程序用于调用。
参数类型OUT能在子程序调用时被分配一个值。由于这个原因当前的数据类型和外部参数必须在传送模式OUT中完全一致。
作为一个参数输出传送是默认的设置,例如:OUT不需要指定。
END语句
END语句总是的全球或本地子程序的最后程序段。子程序的最后程序段执行任何RETURN语句,没有时执行END语句。
没有外部参数的程序的声明:
DEF PROG( )
...
END
声明子程序的外部电流和电压。适当的默认设置,他们输出参数。
DEF WELD(电流,电压)
...
END
声明子程序的外部电流和电压作为输入参数和RESULT 作为输出参数。
DEF WELD(电流:IN, 电压:IN, 结果:OUT)
...
END
在CALCULATE 子程序中,一些变量经过自动操作。在子程序调用后,在主程序中的A和B跟随值:A =11;B=2 。
DEF PROG( )
INT A,B
A=1
B=2
CALCULATE(A,B)
...
END
DEF CALCULATE(X1:OUT,X2:IN)
INT X1,X2
X1=X1+10
X2=X2+10
END
机器人程序的结构是体现其使用价值的一个十分重要的因数。程序结构化越规范,程序就越易于理解、执行效果越好、越便于读取、越经济。为了使程序得到结构化设计,可以使用以下技巧: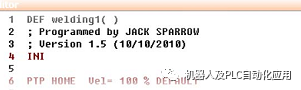 有关程序文本的分段:主要使用画图符号 (特殊符号 #、*、~ )
有关程序文本的分段:主要使用画图符号 (特殊符号 #、*、~ )
 联机表单无法添加一个分号 “;”。
联机表单无法添加一个分号 “;”。 可以使用三种不同的注释方式:
可以使用三种不同的注释方式:
 插入注释和印章的操作步骤
1. 选中其后应插入注释或印章的那一行。
2. 选择菜单序列 指令 > 注释 > 正常或印章。
3. 输入所希望的数据。如果事先已经插入了注释或印章,则联机表格中还保留着相同数据。
插入注释和印章的操作步骤
1. 选中其后应插入注释或印章的那一行。
2. 选择菜单序列 指令 > 注释 > 正常或印章。
3. 输入所希望的数据。如果事先已经插入了注释或印章,则联机表格中还保留着相同数据。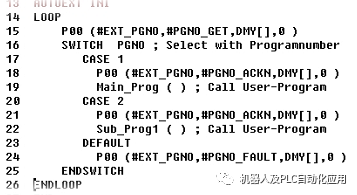 提高机器人程序可读性的一个有效手段是缩进程序行。由此可提高程序单元之间关联的清晰度。
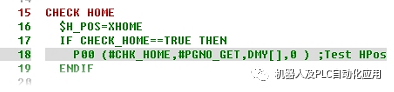
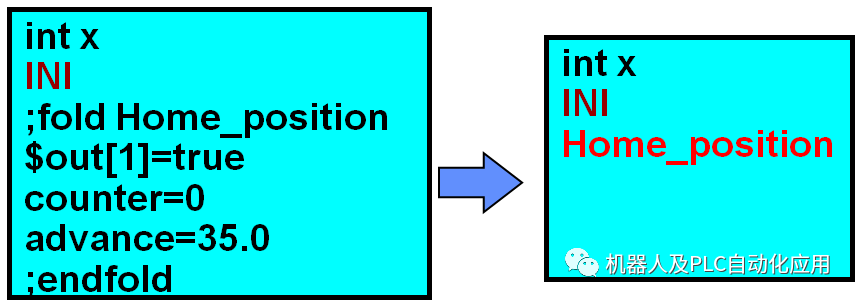
通过折叠夹隐藏程序行
提高机器人程序可读性的一个有效手段是缩进程序行。由此可提高程序单元之间关联的清晰度。
通过折叠夹隐藏程序行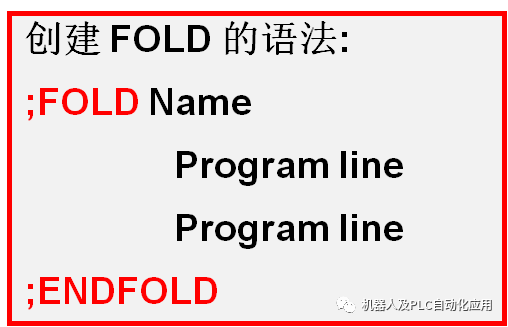
在文件开头用“DEF”进行标识| Program_Name | 程序名进入这儿被定义。它是一个目标名而且在全球函数情况下的它可能不长于24个字符长度受控制器的指令系统限制。 |
| Parameter_ List | 参数列表包含下列说明: 参数名 输出数组类型参数的情况下(输入参数不能被排列),数组尺寸除数组名字外使用下列符号。 [ ] 一维空间的数组 [,] 二维空间的数组 [,,]三维空间的数组 参数的各自转换格式: :IN 输入参数( 由值唤醒) :OUT 输出参数( 由参数唤醒)( 默认值) |
- 注释 | 注解和印章
- 缩进 | 空格
- 隐藏 | Folds (“ 折叠 ”)
- 模块化 | 子程序
- 有关程序文本的信息:作者、版本、创建日期
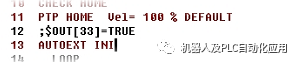
有关程序文本的分段:主要使用画图符号 (特殊符号 #、*、~ )- 添加注释(专家层面):通过在程序行的起始位置添加分号来使该程序行“ 变成注释 ”,即该文本作为注释来识别,而不进入程序执行。
联机表单无法添加一个分号 “;”。- 对行的解释
可以使用三种不同的注释方式:- 添加分号 (专家层面):通过插入分号 (“;”)使一行中的后面部分变成注释。
- 插入联机表格 “ 注释 ”
- 插入联机表格 “ 印章 ”:在此还另外插入一个时间戳记。此外,还可以插入编辑者的姓名。
插入注释和印章的操作步骤
1. 选中其后应插入注释或印章的那一行。
2. 选择菜单序列 指令 > 注释 > 正常或印章。
3. 输入所希望的数据。如果事先已经插入了注释或印章,则联机表格中还保留着相同数据。- 插入注释时,可用新文本来清空注释栏,以便输入新的文字。
- 插入印章时,还可用新时间来更新系统时间,并用新名称清空名称栏。
提高机器人程序可读性的一个有效手段是缩进程序行。由此可提高程序单元之间关联的清晰度。
通过折叠夹隐藏程序行- KUKA 机器人编程语言可将程序行折叠和隐藏到 Fold 中。
- 用户因此而看不到这些程序行。这使程序的阅读变得更加简洁方便。
- 以后可在专家用户组中打开和编辑 Fold。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
程序
+关注
关注
117文章
3804浏览量
81647 -
数组
+关注
关注
1文章
418浏览量
26077 -
KUKA机器人
+关注
关注
4文章
143浏览量
9248
原文标题:KUKA 机器人-结构化机器人程序V5.9
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
变结构智能服务机器人
摘要 随着科学技术的发展,在许多领域里都提出了要平稳运送物品的要求,因此具有平稳运送物品的机器人是现代生活发展所必须拥有的,为此我们设计了能够自行调节高度并保持载物面水平的变结构
发表于 10-31 13:05
工业机器人的基本结构
工业机器人一般由主构架(手臂)、手腕、驱动系统、测量系统、控制器及传感器等组成。 1图是工业机器人的典型结构。机器人手臂具有3个自由度(运动坐标轴),
发表于 01-19 10:36
机器人视觉——机器人的“眼睛”
目前产业机器人仅能在严格定义的结构化环境中执行预定指令动作,缺乏对环境的感知与应变能力,这极大地限制了机器人的应用。利用机器人的视觉控制,不需要预先对产业
发表于 01-23 15:02
华南机器人应用培训中心工业机器人培训班招生
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业
发表于 09-02 14:03
不完美的伴侣机器人?
地用来照顾老人和自闭症儿童,但是大多数人机交互都基于井然有序的、结构化的规则和行为。Biswas认为,人类对机器人的感知常受到科幻作品的影响,但是科幻作品中那些拥有超能力的机器人与现今科学家们对人机交互
发表于 12-28 14:42
工业机器人的末端关节旋转该精确控制?
时间的积累。本文以KUKA为例,分协作机器人iiwa和传统机器人KR两个大系列。协作机器人iiwa 当前主流的协作机器人都采用“模块
发表于 11-01 11:08
工业机器人的技术原理
模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。
发表于 11-23 10:40
KUKA机器人问题解答
1 开机坐标系无效 世界坐标系是以枪头为基点,在这种坐标系中机器人所有的动作都是按照以枪头为顶点来完成移动,XYZ方向切割枪方向不改变,如果机器人在世界坐标系中移动,枪头也随着改变方向,那就是我们在
发表于 07-15 07:48
KUKA焊接机器人伺服电机常见故障及维修处理
KUKA焊接机器人伺服电机常见故障及维修处理1、库卡机器人伺服电机的基本检查由于库卡机器人伺服电机内含有精密检测器,因此,当发生碰撞、冲击时可能会引起故障,在对库卡
发表于 09-26 16:51
焊接机器人的结构与原理
、焊接参数等,并自动生成一个连续执行全部操作的程序。完成示教后,只需给机器人一个起动命令,机器人将精确地按示教动作,一步步完成全部操作,实际示教与再现。焊接机器人
发表于 11-16 16:18
工业机器人组成结构相关资料分享
工业机器人是近两年机械行业最热的字眼,随着企业工业机器人的增多,很多机械工程师对于工业机器人充满了好奇。作为机器人四大家族之一的KUKA,已
发表于 07-05 06:44
库卡机器人MGV电源模块维修
KUKA库卡机器人MGV电源模块维修PH1013-2840MGV电源维修 库卡电源模块维修 机器人电源模块维修 库卡控制器维修 KUKA电源维修KU
发表于 09-08 07:30
机器人系统与控制需求简介
、KUKA、Yaskawa Motoman、FANUC2.2.1 本体结构本体结构分类:不同机器人建模控制的本质区别关节型机械臂:串联垂直多关节6轴
发表于 09-08 07:44





 工商网监
工商网监
评论