 Scansonic激光焊钎焊焊头及机器人程序控制
Scansonic激光焊钎焊焊头及机器人程序控制

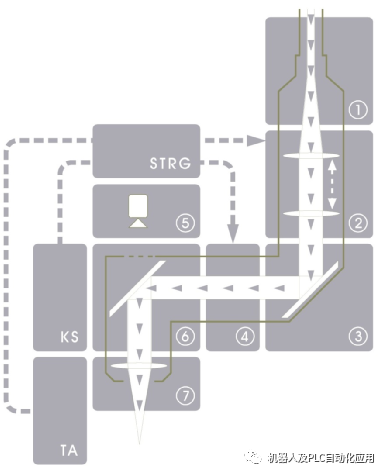
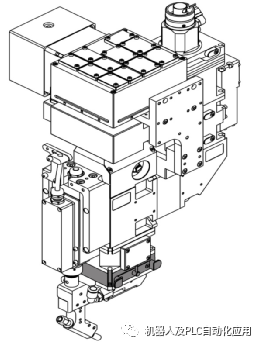
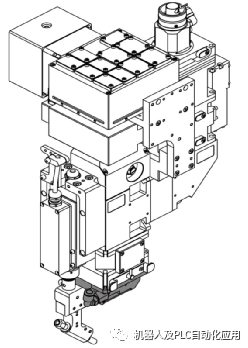
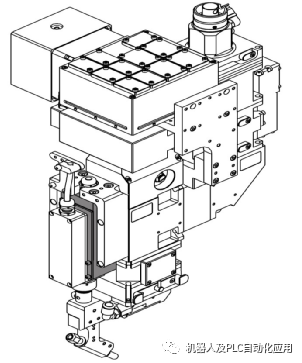
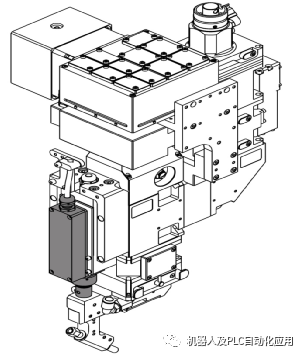
•> (1) 光纤耦合器
•> (2) 自动对焦 /
•> (3) 反射镜modul 1
•> (4) Schwenkachse转轴
•> (6)反射镜modul 2
•> (5) 摄像机modul
•> (7) 聚焦modul
•> Schutzglasmodul(保护镜片)
•> Crossjetmodul(交叉喷射模块)
•> (STRG) Steuerung(控制器)
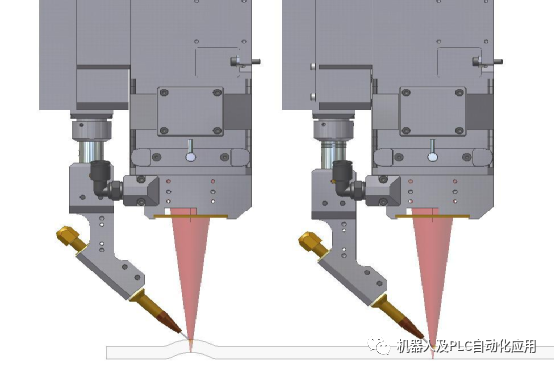
ALO3, Nahtführung in lateraler und Höhenrichtung
焊缝导向(侧面),提升方向
•调整旋钮:调整光斑相对与焊丝的左右位置
更换保护镜片
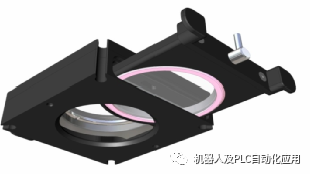
保护气压力为3-5BAR,大时容易产生涡流
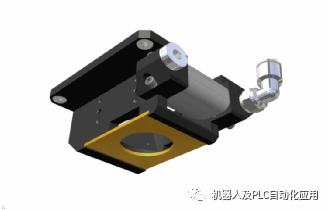
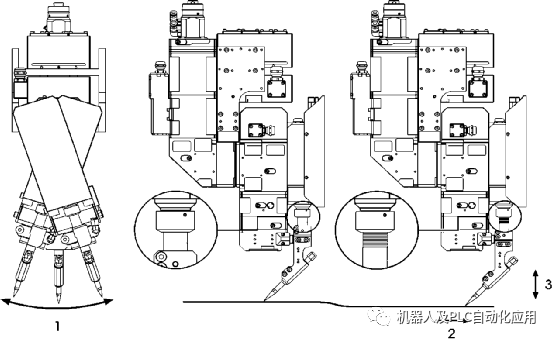
scapacsâ: Module, Kraftsensor(应力感应器,检测支臂的受力,软件内可以调整范围)

scapacsâ: Module, Teleskoparm (TA)(伸缩臂的高度变化是由内部导向杆移动,电路板采集信号,反馈给控制器。伸缩臂向下移动是由内部粗导向杆上的弹簧来完成。)

直径1.6的焊丝伸出长度为8MM
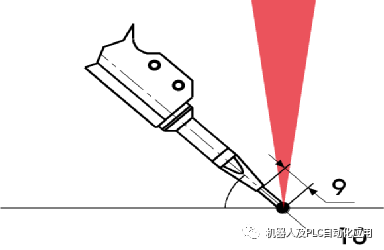
带有自动对焦系统,可以保证TCP点光斑大小不变
ALO3焊头的范围: 641-704
工作程序的使用:
SPSMAKRO450 = EIN ---切丝-
-在进行激光焊接前的准备工作-
29: WARTE BIS E1304 + E27 + EIN -E1304丝筒有丝存在
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5[1/100s] P
1: FB PSPS = EIN
3: A1309 = EIN -A1309给保护气-
4: WARTE ( EIN ) ZEIT 10 [1/10Sek]
5: A1309 = AUS
6: A23 = AUS
8: bin21 ( EIN ) = 1 -BIN21给HKS程序号1-
10: A84 = EIN -关闭机器人安全互锁-
11: SPSMAKRO20 = EIN -关闭机器人之的互锁信号-
12: WARTE BIS E23 & F980 -F980机器人速度100%
13: A23 = EIN
16: WARTE BIS E644 -E644 ALO 3焊头准备就绪-
18: A669 = AUS -ALO 3伸缩臂抱闸A669关闭-
20: WARTE BIS !E669 -等待E669抱闸打开-
26: Tech_ APN_Loeten SA_Pos=1SA_S_Kraft=1 SA_AUE=1 A_Focus_Pos=3 Focus_Pos=AUS - EIN
-设定焊头参数-焊头位置1-焊头力用1-焊头监控区域1,自动对焦程序使用3-关闭对焦位置-
28: WARTE BIS E649 -焊头在位置1-
30: -- Betriebsart AUS --
31: A1319 = AUS -送丝机在工作状态1被关闭(A1319)-
33: WARTE BIS !E1319 -检测送丝机没有工作状态1-
35: Puls A1298 = Pegel: EIN Zeit:6 [1/10Sek] -送丝机故障复位 -
37: WARTE BIS E1297 & E1298& E1306 & E1310 & !A1298
-E1297送丝机准备就绪-E1298送丝机没有故障-E1306送丝机没有内部故障- E1310冷却水正常-A1298故障复位-
39: A1319 = EIN -启动送丝机工作状态1(A1319)
40: WARTE BIS E1319 -送丝机工作状态1检测开启-
42: bin9 ( EIN ) = 26 - BIN9 送丝机的JOB号从A1321开始8位-
44: WARTE BIS E1297 & E1298& E1306 & E1310
-E1297送丝机准备就绪-E1298送丝机没有故障-E1306送丝机没有内部故障- E1310冷却水正常
47: Puls A905 = Pegel: EIN Zeit:6[1/10Sek] -激光焊复位-A905-
49: WARTE BIS !E901 & !A905 -E901激光焊故障
51: A148 = EIN -A148请求激光释放
52: WARTE BIS E148 -PLC给出允许激光发出-
53: Tech_ Laser RobNr = 1 L-ProgNr =1 L_Leistung =3100 - EIN
-给出激光器的机器人呢号-激光器使用的程序号-激光器的功率数-
56: F1 = AUS
58: F2 = AUS
59: A903 = AUS
61: A23 = AUS
63: A80 = EIN -给PLC发出位置安全信号-
65: WARTE BIS E23 & !E79 &E80 -等待PLC给出开始进行激光焊接-
66: A80 = AUS
67: A23 = EIN
68: FB PSPS = M30 & M32 &E44 & E80
PTP VB=50% VE=100% ACC=100% RobWzg=1 Base=1SPSTrig=0[1/100s] P
.........
-启动前的准备-
PTP VB=50% VE=0% ACC=100%RobWzg=1 Base=1 SPSTrig=0[1/100s] P
1: FB PSPS = EIN
2: A23 = AUS
4: Puls A905 = Pegel: EIN Zeit:6 [1/10Sek] -激光焊复位-A905-
6: WARTE BIS !E901 & !A905
8: WARTE BIS !E903 -安全开关关闭-
9: A897 = EIN --A897激光请求--
10: WARTE BIS E900 --激光关闭开关-
12: A898 = !E13 -A898发出先导激光-E13机器人机器人急停
14: WARTE BIS M37 & M38 & E148 + !E13
-M37激光焊没有故障-M38激光请求已发出-E148 激光释放-
17: F122 = EIN --自动时启动喷气先导阀--
A1009 = F122 & E13 & A4039 + F123 & A11
F122在机器人自动时给喷气-F123手动时给喷气-A1009喷气的先导阀
18: F123 = EIN –手动时启动喷气先导阀--
19: A1012 = AUS -关闭喷气-
20: A1011 = EIN ---保护喷气启动--
22: A1309 = EIN ---焊接保护氦气体给气--
23: ------------------------------------------- --
25: ana6 ( EIN ) = VPROP: 1669 [mm/Sek] OFFS: 0[mV]
-----给HKS发出机器人的速度-----
26: bin10 ( EIN ) = 10 --给HKS程序号—A1409开始
27: WARTE BIS E644 & E1409 + E185 -E1409HKS准备就绪-E644焊头准备就绪-
28: t11 ( EIN ) = 0[1/10Sek]
29: WARTE BIS E23
30: A23 = EIN
31: FB PSPS = M30 & M32 &M39 & E44 & E80
开始焊接:
KLIN VB=10[mm/s] Genau=1[mm]ACC=100% RobWzg=1 Base=1 SPSTrig=0[1/100s] P
BS F1 ( EIN ) = EIN Schaltpkt: 5[mm]: 0[ms]F1激光启动断焊重启功能激光监控
BS F2 ( EIN ) = EIN Schaltpkt: 5[mm]: 0[ms]F2激光启动断焊重启功能激光监控
BS A908 ( !E15 ) = E13 Schaltpkt: -2[mm]: 0[ms] -A908静态激光启动-
BS F198 ( !E15 ) = E13 Schaltpkt: -1[mm]: 0[ms] –F198开始送丝-
A1302 = F198 & E13 & F960& A4039 + F199 & A11
A1302 开始冷送丝-E13机器人急停-F960 =M254FB开行条件满足-F199用于手动时送丝-
BS A1415 ( EIN ) = EIN Schaltpkt: -5 [mm]: 0[ms] - A1415 HKS开始监控-
1: t11 ( EIN ) = STOP
2: t11 ( EIN ) = 0[1/10Sek]
KLIN VB=40[mm/s] Genau=10[mm] ACC=100% RobWzg=1 Base=1 SPSTrig=0[1/100s] P
BS bin2 ( EIN ) = 3100 Schaltpkt: 0[mm]: 0[ms] - bin2激光功率-
BS bin9 ( EIN ) = 26 Schaltpkt: -2[mm]: 0[ms] -- bin9送丝的JOP号-
BS A649 ( EIN ) = AUS Schaltpkt: -3[mm]: 0[ms]
-A649 位置1-- 使用位置1被关闭,所以开始激活力1
激光焊接结束后:
锁紧焊头的抱闸
KLIN VB=40[mm/s] Genau=10[mm] ACC=100% RobWzg=1 Base=1 SPSTrig=0[1/100s] P
BS A653 ( EIN ) = AUS Schaltpkt: 0 [mm]: 0[ms] - A653关闭力1
BS A669 ( EIN ) = EIN Schaltpkt: 0 [mm]: 0[ms] - A669抱闸打开-
关闭激光和送丝
KLIN VB=40[mm/s] Genau=10[mm] ACC=100% RobWzg=1 Base=1 SPSTrig=0[1/100s] P
BS F1 ( EIN ) = AUS Schaltpkt: -5 [mm]: 0[ms] --关闭激光监控
BS F2 ( EIN ) = AUS Schaltpkt: -5 [mm]: 0[ms] --关闭送丝监控
BS A903 ( EIN ) = EIN Schaltpkt: 1 [mm]: 0[ms] -开启讯问激光1 A903 -
BS F198 ( EIN ) = AUS Schaltpkt: -1 [mm]: 0[ms] -关闭F198送丝-
监控质量,关闭控制:
LIN VB=20[mm/s] VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=0[1/100s] P
1: FB PSPS = EIN
3: -- HKS aus --
4: A1415 = AUS监控质量,关闭控制:
5: t11 ( EIN ) = STOP
8: A1011 = AUS ---关闭吹气
9: Puls A1012 = Pegel: EIN Zeit:6 [1/10Sek] --关闭吹气
10: F122 = AUS
11: F123 = AUS
13: A1309 = AUS --关闭发出氦气-
16: WARTE ( EIN ) ZEIT 6 [1/10Sek]
17: WARTE BIS !E192 & E1409 & !E1411 + E26 & !E192 + E185
-E1409 –HKS准备就绪- E192HKS停止- E1411故障- E26 跳过故障 - E185不使用HKS-
20: Tech_ APN_Loeten SA_Pos=1 SA_S_Kraft=AUS SA_AUE=1 A_Focus_Pos=AUSFocus_Pos=AUS - EIN -使用USER将焊头回到原位-
21: WARTE BIS E649 -焊头回到位置1-
23: A669 = AUS --抱闸关闭--
25: A23 = AUS
28: A908 = AUS --激光静态程序关系
29: A903 = AUS --选择使用通道1
31: A898 = AUS --关闭先导激光-
33: A148 = AUS --通知PLC激光焊接完成--
35: A897 = AUS --激光请求--
37: SPSMAKRO800 = EIN -激光焊控制关闭-A912机器人外部控制-A908机器人静态程序
40: WARTE BIS F60 & !F61 + F61 & E26 + E15 + !F62 -检查激光焊接是否合格
41: F60 = AUS
42: F61 = AUS
43: WARTE BIS F7 & !E907 + E26 -F7检测激光器和送丝机是否有故障-E26故障复位
45: WARTE BIS !E192 & E1409 +E26 & !E192 + E185
47: SPSMAKRO1 = EIN --发出完成信号1
49: WARTE BIS E23
50: A23 = EIN
51: FB PSPS = M30 & E44 &E80
审核编辑 :李倩
-
控制器
+关注
关注
112文章
16273浏览量
177723 -
机器人
+关注
关注
211文章
28316浏览量
206815 -
电路板
+关注
关注
140文章
4940浏览量
97608
原文标题:Scansonic激光焊钎焊焊头及机器人程序控制
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论