 基于远程数据处理的智慧城市机器人视觉SLAM
基于远程数据处理的智慧城市机器人视觉SLAM
室内导航是在城市环境中使用机器人和无人机的主要紧迫问题之一,特别是在没有全球导航卫星系统(GNSS)信号的情况下。这在智慧城市的背景下尤其重要,当物联网的各种异构设备、地面、水上和水下机器人、无人机和无人驾驶车辆组合在一个单一的信息管理系统中时,有目的地行动,自主或远程操作。
在这方面,研究人员提出了一种通用的方法,以提高机器人和无人机使用的SLAM算法用于定位和映射的效率,其本质是使用vSLAM的优化算法以及一个或多个远程处理服务器。最初假设在目标房间或建筑物中部署无线网络(多个无线网络或网状网络)。资源密集型数据处理“转移”到远程服务器(服务器),前提是机器人/无人机可以访问它/它们(可以使用云、雾和/或边缘服务器和框架)。这样可以显着减轻机器人/无人机的计算负担,并增加其操作时间。然而,通过无线网络将数据传输到服务器,其处理并将结果发送到机器人/无人机会导致导航数据(地图更新和机器人在本地空间中的位置)的提供延迟。解决这个问题的主要方法是使用数据压缩方法和算法,更快的标准和通信协议,以及在网络中的代理之间自适应重新分配负载。
通常,可以区分为机器人创建远程vSLAM系统的两种方法(图1)。第一种方法意味着通过无线连接将来自传感器(视频流)的原始数据直接发送到远程云/雾/边缘计算服务器。服务器执行特征检测和提取、姿态估计、映射、3D 点云拼接、地图优化和融合、跟踪本地地图、位置识别和闭环,而机器人仅负责向服务器发送视频数据并检索地图关键帧/地图更新。可以使用各种工具、协议、算法和数据压缩方法(如JPEG、RVL、PNG )来减少无线信道上的负载和传输的数据量。该解决方案的优点是机器人/无人机的计算负担低,并且增加了运行时间。缺点包括增加服务器上的计算负载,对无线数据传输通道的高要求,以及从服务器检索机器人/无人机数据(处理的关键帧/地图更新)的延迟增加。
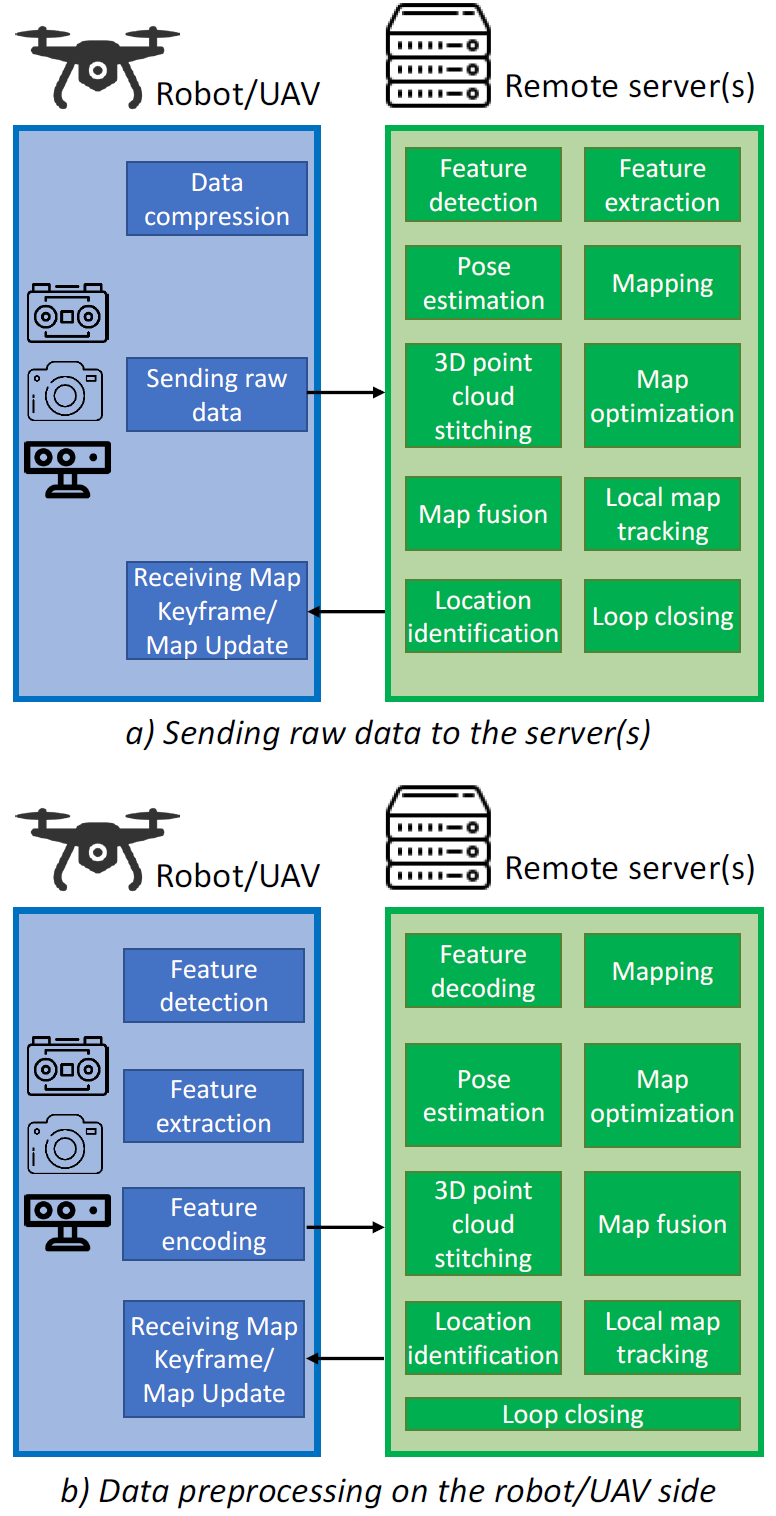
图1创建远程 vSLAM 系统和可视化数据处理的方法
第二种方法涉及移动设备/机器人/无人机上的数据预处理(例如,特征检测、提取和编码),随后将数据传输到远程服务器(云/雾/边缘计算)进行进一步处理并获取地图关键帧/地图更新。该方法的优点是减少了使用的网络流量和无线带宽要求。主要缺点是机器人/无人机的计算负载增加,从而减少了它们的运行时间。图 2 显示了机器人和无人机远程 vSLAM 系统的分类。
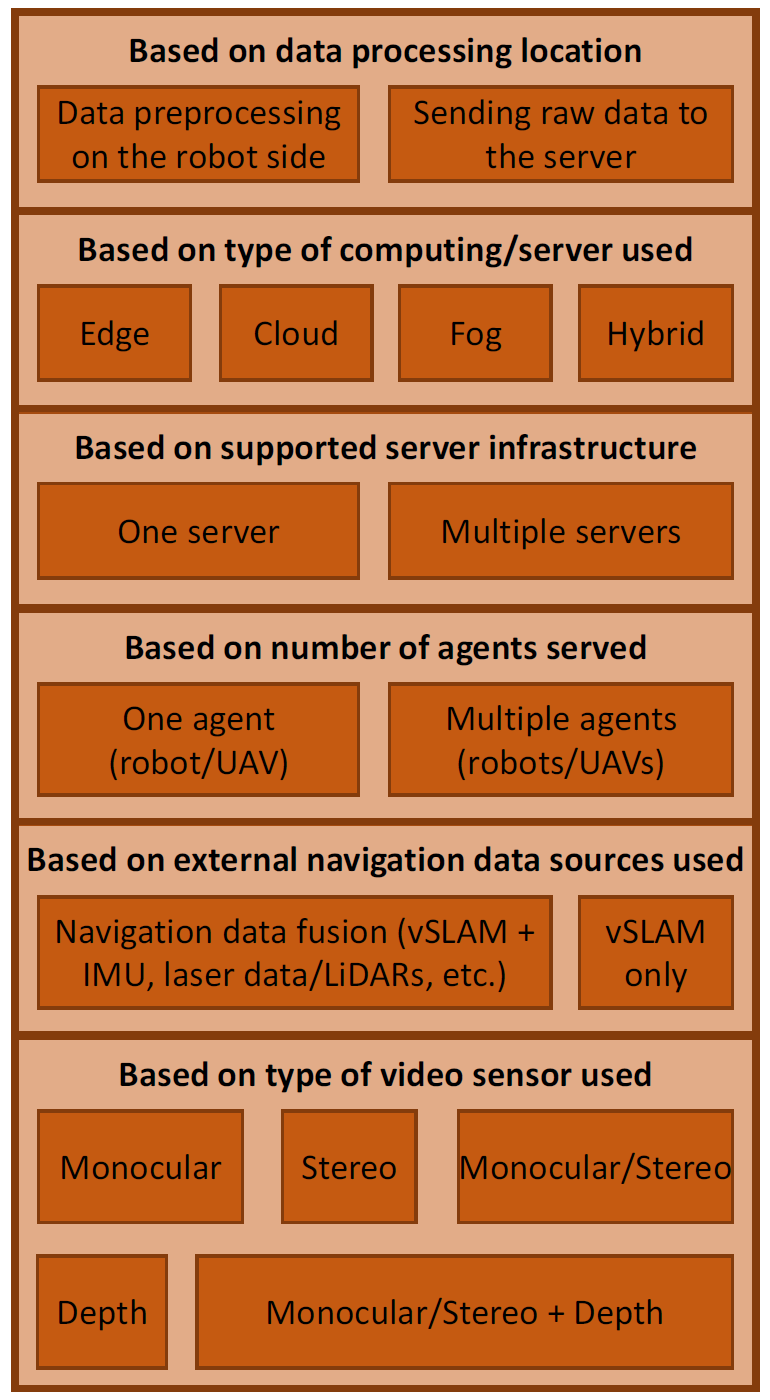
图2远程 vSLAM 系统的分类
通过分析,可以对智能城市环境中机器人/无人机室内导航的有前途的vSLAM系统提出以下主要要求:
①单目和 RGB-D 都必须支持作为相机输入;
②vSLAM 应支持 640x480(480p)或1280 x 720(720p)分辨率,深度和RGB图像至少为30FPS ;
③为了达到所需的FPS值,机器人/无人机的无线信道带宽(上行链路和下行链路)应至少为350Mbps。因此,建议启用对Wi-Fi 802.11 n/ac/ax/ad 和/或5G无线标准的支持。使用 Wi-Fi 时,建议使用 5 GHz 信道。此外,还应使用具有最小数据包丢失的可靠或专用网络协议;
④ vSLAM框架应该同时具有多机器人和多服务器支持,具有自适应工作负载和计算负担平衡,以最大程度地减少延迟。分散式多机器人系统支持也是强制性的;
⑥耗时应为20–30毫秒。最大延迟上限阈值应为40毫秒,以确保最小磁道丢失率,定位精度不应低于5cm。
室内导航仍然是智慧城市中使用机器人和无人机的紧迫问题,尤其是在GNSS信号缺失或较弱的情况下。使用SLAM和vSLAM算法以及一个或多个边缘/雾/云数据处理服务器进行机器人/无人机的定位和映射是有前途的解决方案之一。基于对现有解决方案的分析并执行分类,可以形成一套有前途的vSLAM系统的要求,用于机器人/无人机的室内导航,包括其摄像头输入,分辨率,FPS数量,带宽,无线标准,通道和协议的支持,多机器人/多服务器支持以及时间消耗。
审核编辑 :李倩
-
机器人
+关注
关注
211文章
28468浏览量
207356 -
SLAM
+关注
关注
23文章
425浏览量
31858 -
智慧城市
+关注
关注
21文章
4269浏览量
97410
原文标题:基于远程数据处理的智慧城市机器人视觉SLAM
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机器人视觉——机器人的“眼睛”
激光导航AGV底盘定制 巡检机器人,服务机器人,智慧物流搬运AGV
深度解析|机器人自主移动的秘密(二)
让机器人完美建图的SLAM 3.0到底是何方神圣?
LabVIEW 的Tripod 机器人视觉处理和定位研究
【Toybrick RK3399Pro AI开发板试用申请】机器人激光与视觉融合的导航模块
服务机器人的视觉系统怎么设计?
机器人视觉与机器视觉有什么不一样?
激光SLAM与视觉SLAM有什么区别?
基于视觉的slam自动驾驶
基于视觉的机器人SLAM入门实践
使用OptiTrack光学跟踪系统和Turtlebot机器人进行视觉SLAM定位实验






 工商网监
工商网监
评论