 MIT最新研究让机械手只需轻轻一抓就能识别物体!
MIT最新研究让机械手只需轻轻一抓就能识别物体!
如果和机械手一起玩“摸箱子”游戏,你有信心能赢么?
先别盲目自信,论谁更会“摸”,机械手说不定更胜一筹,因为它的「类人触感技术」最近又又又进化了!
别看它只有3根手指头,仅需要抓握一次,这只机械手就能识别出手中的物体是什么,准确率可达85%!
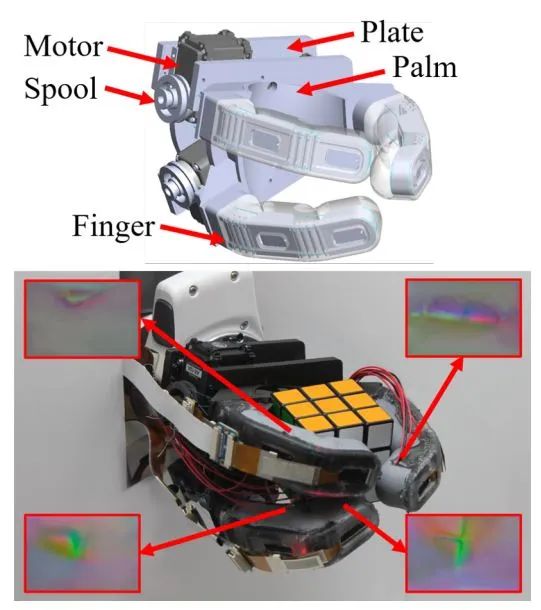
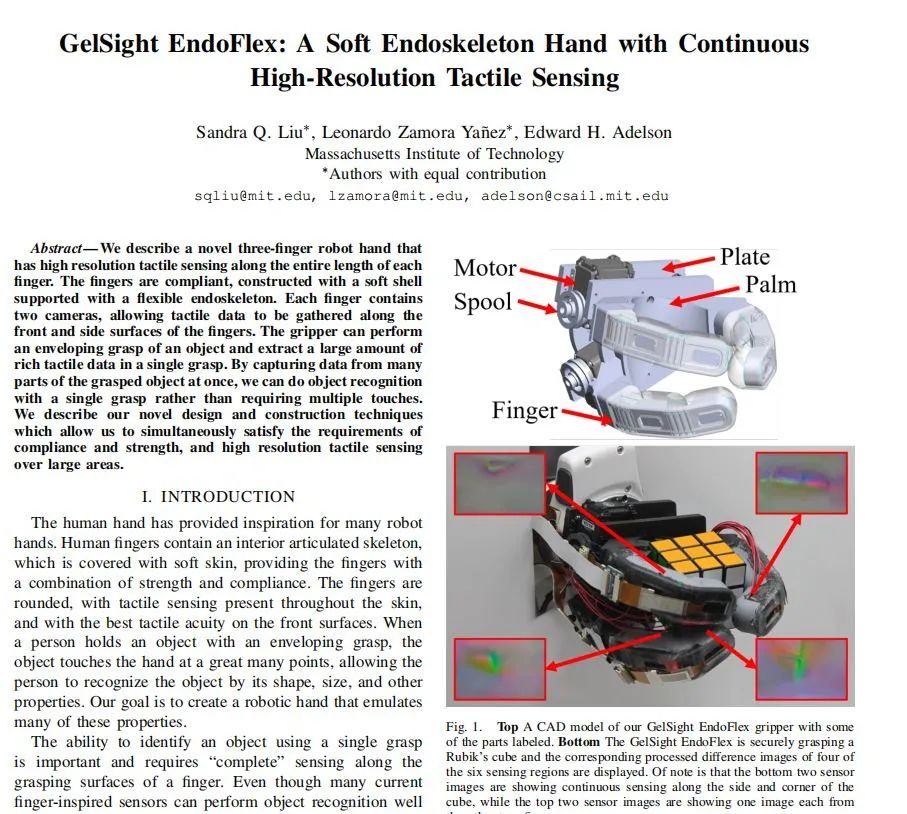
这是MIT最新研究成果,他们在其透明“皮肤”下集成了多个高分辨率传感器,使用摄像头和LED来收集物体形状的视觉信息,沿着手指提供连续感应,一次抓取后就能识别物体,小手一握,尽在掌握!
▍全手指集成高分辨率传感器
具有触觉的机械手不在少数,它们要么把传感器安装在指尖中,需要和物体完全接触才能感知;要么将低分辨率传感器分布在整个手指上,通常需要多次抓握才能捕获信息。
这让机械手的触觉感知显得有些“迟钝”。
相比之下,MIT的机械手具有极高的敏感度,那它到底是怎么做到的?
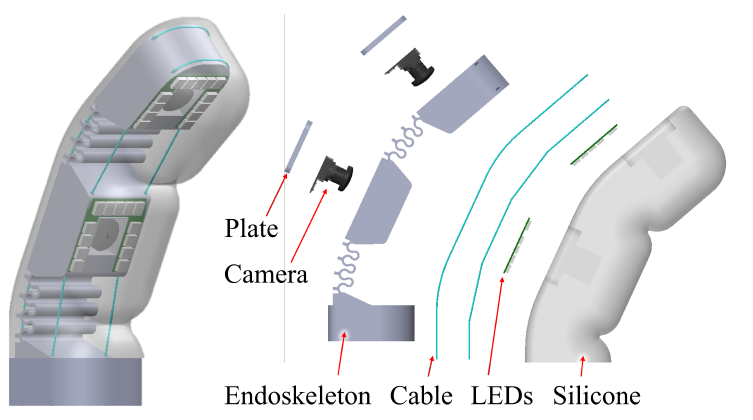
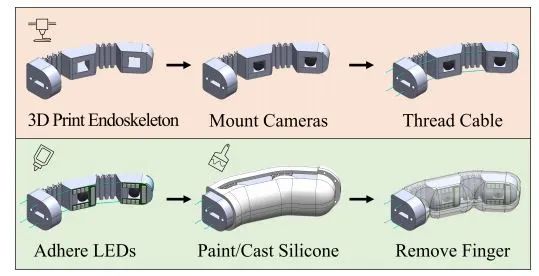
我们先从机械手的设计讲起,它结合了刚性和柔性设计,既“强壮”又“温柔”,指骨由3D打印的刚性内骨骼组成,包裹在透明的硅胶“皮肤”里,这种设计让它可以轻松拿起重物,柔软的皮肤也给交互带来更多安全感。
其中,每个手指的刚性内骨骼都由可弯曲的关节和指骨组成:
(每个手指独立操作,具有一个自由度,如果损坏可以快速更换)
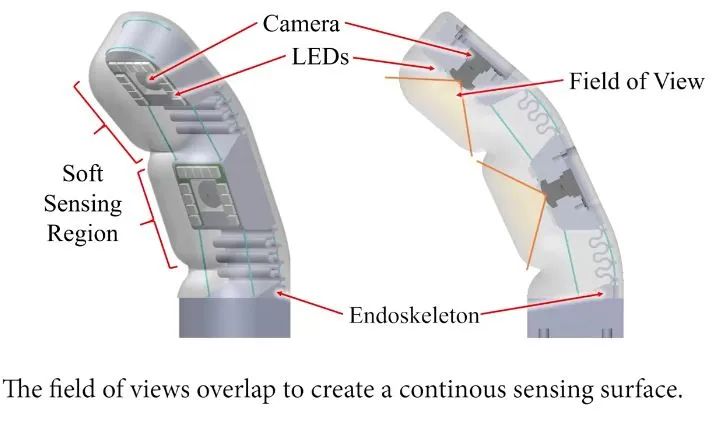
每段指骨内嵌入了一对精细的触摸传感器,称为GelSight 传感器,由一个摄像头和三个彩色 LED 组成。这里的摄像头并不是让机械手去“看”物体,而是利用彩色 LED 从内部照亮皮肤,相机来捕捉物体的大致轮廓图像。

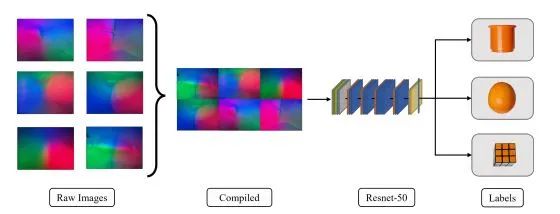
当图像的照明轮廓出现在皮肤上时,一种算法执行反向计算将轮廓映射到所抓物体的表面上。研究人员训练了一个机器学习模型,以使用原始相机图像数据识别物体。
更妙的是,虽然研发团队只在每段指骨中嵌入了摄像机,但手指可以弯曲呀,当它弯曲的时候相机的范围能够略微重叠,这样就实现了整个手指长度的连续感应!
而机械手虽然只有3根手指,但每一根的作用都不多不少刚刚好:其中两根手指以 Y 型排列,第三根手指作为辅助的拇指,当它抓住物体时,手会捕捉六张图像(每个手指两张),并将这些图像发送到机器学习算法来识别物体。结合每根手指的连续触觉感应,它可以从一次抓握中收集丰富的触觉数据!
▍意外收获——皱纹让硅胶皮肤寿命更长
机械手的设计过程也并不是那么顺利的,在对机械手进行测试时,研发团队发现:机械手的硅胶皮肤会随着时间的推移从表面剥落。
但同时,他们还有个意外收获——添加皱纹可以增加机械手寿命!
最初,为了解决硅胶剥落的问题,研发团队在内骨骼关节中增加了曲线设计,这样可以在手指弯曲时分担硅胶皮肤的压力;他们还在关节上增加了折痕,这样当手指弯曲时硅胶就不会被压扁。
这一切都是为了防止硅胶表面起皱,但随后他们发现:在手指表面制造的皱纹,有助于防止硅胶膜上的撕裂!
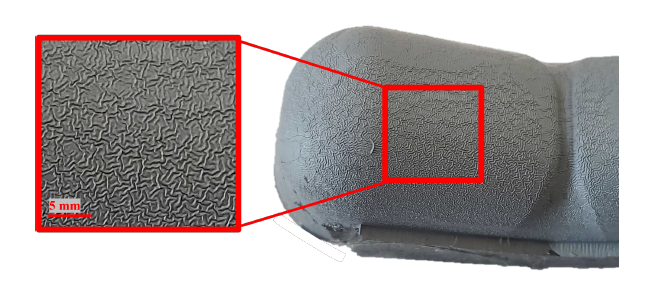
和光滑的硅胶皮肤相比,皱纹有助于减轻由尖角进入传感器表面而造成的高应力点。有皱纹的表面也比光滑的表面摩擦更小。虽然皱纹会出现在传感器图像中,导致表面重建困难,但它完全没有对物体分类结果产生影响。
“皱纹的用处是我们的一个偶然发现。当我们在表面合成它们时,我们发现它们实际上使手指比我们预期的更耐用,”MIT的研究人员表示。
GelSight EndoFlex 传感器网状皱纹表面的特写图像。其中一条皱纹的宽度约为 0.4 毫米,是我们在模具表面喷上油漆,然后再将硅胶浇注到内部时才形成的。
▍进一步研发感知手掌
这项研究的第一作者是MIT的机械工程博士生Sandra Liu,她目前在Edward Adelson 教授领导的感知科学小组中进行研究工作。该研究将在 RoboSoft 会议上展示。
这项研究为机械手的发展带来了新的可能性,一次抓握精准识别大大提升了速度和效率,“我们的目标是将人手的功能尽可能赋予给机器人,它可以完成其他机器人手指目前无法完成的任务,”Sandra Liu说:“未来我们考虑进一步研发具有感应功能的手掌,更好地进行触觉区分。”
未来,研究人员还希望改进硬件,以减少硅胶随时间的磨损量,并为拇指增加更多的驱动力,使其能够执行更广泛的任务。
审核编辑 :李倩
-
传感器
+关注
关注
2550文章
51000浏览量
752960 -
分辨率
+关注
关注
2文章
1058浏览量
41915 -
机械手
+关注
关注
7文章
334浏览量
29633
原文标题:机械手超越人类触感?MIT最新研究让机械手只需轻轻一抓就能识别物体!
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐

机械手 OEM 的应用
明治案例 | 【BGS背景抑制】【大光斑】机械手吸取网布有无检测

机器视觉控制机械手的具体过程

PLC在机械手控制系统中的具体应用

工业网关的数字化车间机械手和工业生产设备远程监控解决方案应用

ZR机械手:提高生产效率,降低成本的有效途径-速程精密

ZR机械手:推动制造业向更高水平发展






 工商网监
工商网监
评论