 单片机GPIO(输入/输出)、外部中断
单片机GPIO(输入/输出)、外部中断
一、GPIO(输入/输出)
#include "reg52.h" //此文件中定义了单片机的一些特殊功能寄存器
#define uchar unsigned char
#define uint unsigned int
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
void delay_ms(uint c) //误差 0us
{
uchar a,b;
for (; c>0; c--)
{
for (b=199;b>0;b--)
{
for(a=1;a>0;a--);
}
}
}
void main()
{
while(1)
{
}
}
复制
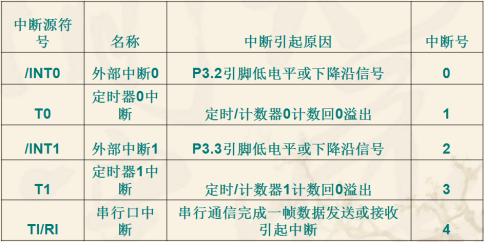
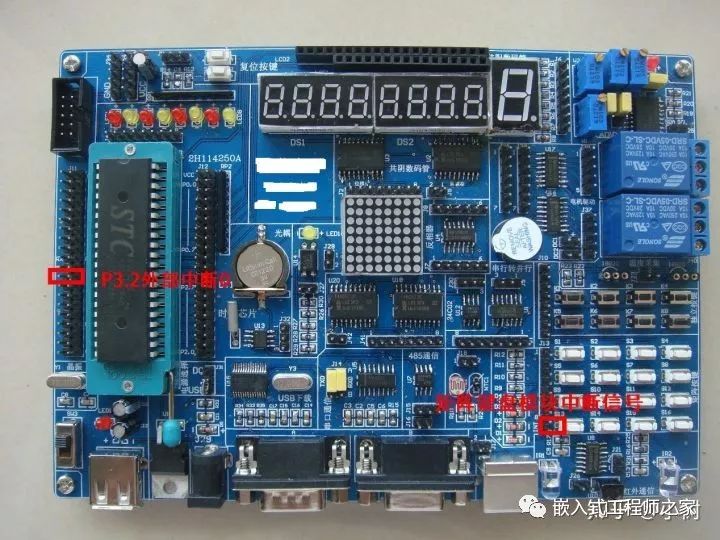
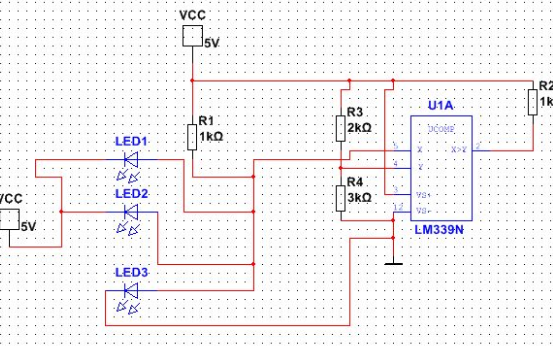
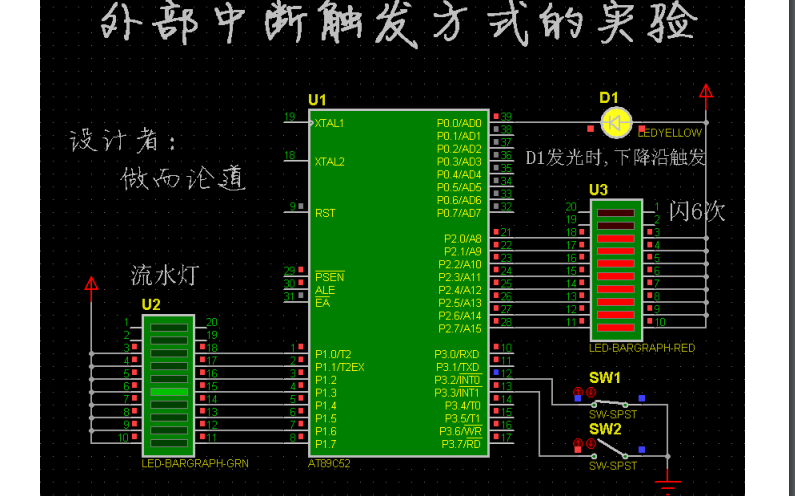
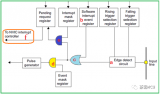
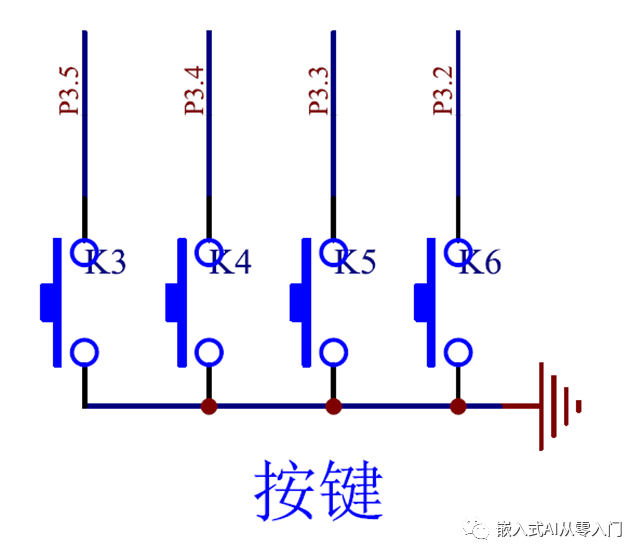
二、外部中断(按键/各类模块)
(1)使能外部中断
EA=1; //全局中断开
EX0=1; //外部中断0开() EX1 为外部中断1 (P3^3)
IT0=1; //低电平触发 IT1为中断1
复制
(2)外部中断函数
void Key_INT( ) interrupt 0 // INT0 1 INT1 2
{
LED =~LED;
}
复制
三、定时器(时钟/LED闪烁/看门狗/中断)
(1)使能定时器
TMOD |= 0x01; //开启定时器0 0x10时使用定时器1 0x11时启动两个
TH0=0XFC; //给定时器赋初值,定时1ms TH1
TL0=0X18; //TL1
EA=1; //总中断打开
ET0=1; //定时器0中断打开 ET1
TR0=1; //定时器0开关打开 TR1
复制
(2)定时器中断函数
void Timer0() interrupt 1 //参考上图 定时器1时为3
{
static uint i; //定义一个自变形变量
TH0=0XFC; //给定时器赋初值,定时1ms TH1
TL0=0X18; //TL1
i++;
if(i==1000)
{
i=0;
led=~led; //定义要实现的功能
}
}
复制
四、串口(波特率9600 11.0592M)
void UsartInit()
{
TMOD=0x20;
TH1=0xfd;
TL1=0xfd;
TR1=1;
SM0=0;
SM1=1;
REN=1;
EA=1;
ES=1;
}
void Uart1Send(uchar c)
{
SBUF=c;
while(!TI);
TI=0;
}
void Uart1Sends(uchar *str)
{
while(*str!='')
{
SBUF=*str;
while(!TI);
TI=0;
str++;
}
}
void Usart_rec() interrupt 4
{
unsigned char datt;
if(RI == 1)
{
RI=0;
datt=SBUF;//出去接收到的数据
}
}
复制
五、数码管
#include "reg52.h"
#define uchar unsigned char
#define uint unsigned int
#define SEG P0
sbit SCAN1 = P2^0;
sbit SCAN2 = P2^1;
sbit SCAN3 = P2^2;
sbit SCAN4 = P2^3;
uchar number;
uchar distab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};
int display=0;//数码管刷新
void delay_ms(uint j) //1ms
{
uchar i=250;
for(;j>0;j--)
{
while(--i);
i=249;
while(--i);
i=250;
}
}
//以下函数放在定时器中断内
SEG = 0XFF;
switch(number)
{
case 0:SCAN4=1;SCAN3=0;SCAN2=0;SCAN1=0;SEG=distab[1];break;
case 1:SCAN4=0;SCAN3=1;SCAN2=0;SCAN1=0;;SEG=distab[2];break;
case 2:SCAN4=0;SCAN3=0;SCAN2=1;SCAN1=0;SEG=distab[3];break;
case 3:SCAN4=0;SCAN3=0;SCAN2=0;SCAN1=1;;SEG=distab[4];break;
default:break;
}
number++;
if(number>3)number=0;
复制
六、矩阵键盘
sbit h1 = P1^0;
sbit h2 = P1^1;
sbit h3 = P1^2;
sbit h4 = P1^3;
sbit l1 = P1^4;
sbit l2 = P1^5;
sbit l3 = P1^6;
sbit l4 = P1^7;
void key_scan()
{
h1=1;
h2=1;
h3=1;
h4=1;
l1=1;
l2=1;
l3=1;
l4=1;
h1=0;
if(l1==0 && h1==0 && h2==1 && l2==1 && l3==1 && l4==1 ) //1
{
while(l1==0);
}else if(l1==1 && h1==0 && h2==1 && l2==0 && l3==1 && l4==1 ) //2
{
while(l2==0);
}else if(l1==1 && h1==0 && h2==1 && l2==1 && l3==0 && l4==1)//3
{
while(l3==0);
}else if(l1==1 && h1==0 && h2==1 && l2==1 && l3==1 && l4==0)//4
{
while(l4==0);
}
else
{
h1=1;
h2=0;
if(l1==0 && h1==1 && h2==0 && l2==1 && l3==1 && l4==1 )//6
{
while(l1==0);
}else if(l1==1 && h1==1 && h2==0 && l2==0 && l3==1 && l4==1 )//7
{
while(l2==0);
}else if(l1==1 && h1==1 && h2==0 && l2==1 && l3==0 && l4==1)//8
{
while(l3==0);
}else if(l1==1 && h1==1 && h2==0 && l2==1 && l3==1 && l4==0)//9
{
while(l4==0);
}else
{
h1=1;
h2=1;
h3=0;
if(l1==0 && h1==1 && h2==1 && h3==0 && l2==1 && l3==1 && l4==1)//11
{
while(l1==0);
}else if(l1==1 && h1==1 && h2==1 && h3==0 && l2==0 && l3==1 && l4==1)//12
{
while(l2==0);
}else if(l1==1 && h1==1 && h2==1 && h3==0 && l2==1 && l3==0 && l4==1)//13
{
while(l3==0);
}else if(l1==1 && h1==1 && h2==1 && h3==0 && l2==1 && l3==1 && l4==0 )//14
{
while(l4==0);
}
else
{
h3=1;
h4=0;
if(l1==0 && h1==1 && h2==1 && h3==4 && l2==1 && l3==1 && l4==1)//11
{
while(l1==0);
}else if(l1==1 && h1==1 && h2==1 && h3==4 && l2==0 && l3==1 && l4==1)//12
{
while(l2==0);
}else if(l1==1 && h1==1 && h2==1 && h3==4 && l2==1 && l3==0 && l4==1)//13
{
while(l3==0);
}else if(l1==1 && h1==1 && h2==1 && h3==4 && l2==1 && l3==1 && l4==0 )//14
{
while(l4==0);
}
}
}
}
}
复制
七、LCD1602
#include
#define uchar unsigned char
#define uint unsigned int
#define LCD1602_DATAPINS P0
sbit LCD1602_E=P2^2;
sbit LCD1602_RW=P2^1;
sbit LCD1602_RS=P2^0;
/*******************************************************************************
* 函 数 名 : Lcd1602_Delay1ms
* 函数功能 : 延时函数,延时1ms
* 输 入 : c
* 输 出 : 无
* 说 名 : 该函数是在12MHZ晶振下,12分频单片机的延时。
*******************************************************************************/
void Lcd1602_Delay1ms(uint c) //误差 0us
{
uchar a,b;
for (; c>0; c--)
{
for (b=199;b>0;b--)
{
for(a=1;a>0;a--);
}
}
}
/*******************************************************************************
* 函 数 名 : LcdWriteCom
* 函数功能 : 向LCD写入一个字节的命令
* 输 入 : com
* 输 出 : 无
*******************************************************************************/
void LcdWriteCom(uchar com) //写入命令
{
LCD1602_E = 0; //使能
LCD1602_RS = 0; //选择发送命令
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = com; //放入命令
Lcd1602_Delay1ms(1); //等待数据稳定
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E = 0;
}
/*******************************************************************************
* 函 数 名 : LcdWriteData
* 函数功能 : 向LCD写入一个字节的数据
* 输 入 : dat
* 输 出 : 无
*******************************************************************************/
void LcdWriteData(uchar dat) //写入数据
{
LCD1602_E = 0; //使能清零
LCD1602_RS = 1; //选择输入数据
LCD1602_RW = 0; //选择写入
LCD1602_DATAPINS = dat; //写入数据
Lcd1602_Delay1ms(1);
LCD1602_E = 1; //写入时序
Lcd1602_Delay1ms(5); //保持时间
LCD1602_E = 0;
}
/*******************************************************************************
* 函 数 名 : LcdInit()
* 函数功能 : 初始化LCD屏
* 输 入 : 无
* 输 出 : 无
*******************************************************************************/
void LcdInit() //LCD初始化子程序
{
LcdWriteCom(0x38); //开显示
LcdWriteCom(0x0c); //开显示不显示光标
LcdWriteCom(0x06); //写一个指针加1
LcdWriteCom(0x01); //清屏
LcdWriteCom(0x80); //设置数据指针起点
}
//按指定位置显示一个字符
void DisplayOneChar(unsigned char X, unsigned char Y, unsigned char DData)
{
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
if (Y) X |= 0x40; //当要显示第二行时地址码+0x40;
X |= 0x80; // 算出指令码
LcdWriteCom(X); //这里不检测忙信号,发送地址码
LcdWriteData(DData);
}
//按指定位置显示一串字符
void DisplayListChar(unsigned char X, unsigned char Y, unsigned char code *DData)
{
unsigned char ListLength;
ListLength = 0;
Y &= 0x1;
X &= 0xF; //限制X不能大于15,Y不能大于1
while (DData[ListLength]>=0x20) //若到达字串尾则退出
{
if (X <= 0xF) //X坐标应小于0xF
{
DisplayOneChar(X, Y, DData[ListLength]); //显示单个字符
ListLength++;
X++;
}
}
}
复制
八、DHT11
sbit Data=P1^0; //定义数据线
uchar T_RH,T_TH;
void DHT11_delay_ms(uint z)
{
uint i,j;
for(i=z;i>0;i--)
for(j=110;j>0;j--);
}
void DHT11_delay_us(uchar n)
{
while(--n);
}
void DHT11_start()
{
Data=1;
DHT11_delay_us(2);
Data=0;
DHT11_delay_ms(30); //延时18ms以上
Data=1;
DHT11_delay_us(30);
}
uchar DHT11_rec_byte() //接收一个字节
{
uchar i,dat=0;
for(i=0;i<8;i++) //从高到低依次接收8位数据
{
while(!Data); ////等待50us低电平过去
DHT11_delay_us(8); //延时60us,如果还为高则数据为1,否则为0
dat<<=1; //移位使正确接收8位数据,数据为0时直接移位
if(Data==1) //数据为1时,使dat加1来接收数据1
dat+=1;
while(Data); //等待数据线拉低
}
return dat;
}
void DHT11_receive() //接收40位的数据
{
uchar R_H,R_L,T_H,T_L,RH,RL,TH,TL,revise;
DHT11_start();
if(Data==0)
{
while(Data==0); //等待拉高
DHT11_delay_us(40); //拉高后延时80us
R_H=DHT11_rec_byte(); //接收湿度高八位
R_L=DHT11_rec_byte(); //接收湿度低八位
T_H=DHT11_rec_byte(); //接收温度高八位
T_L=DHT11_rec_byte(); //接收温度低八位
revise=DHT11_rec_byte(); //接收校正位
DHT11_delay_us(25); //结束
if((R_H+R_L+T_H+T_L)==revise) //校正
{
RH=R_H;
RL=R_L;
TH=T_H;
TL=T_L;
}
T_RH = RH;
T_TH = TH;
}
}
复制
九、DS18B20
sbit DQ=P3^6; //数据传输线接单片机的相应的引脚
unsigned char tempL=0; //设全局变量
unsigned char tempH=0;
unsigned int sdata; //测量到的温度的整数部分
unsigned char xiaoshu1; //小数第一位
unsigned char xiaoshu2; //小数第二位
unsigned char xiaoshu; //两位小数
bit fg=1; //温度正负标志
void delay(unsigned char i)
{
for(i;i>0;i--);
}
void Init_DS18B20(void)
{
unsigned char x=0;
DQ=1; //DQ先置高
delay(8); //稍延时
DQ=0; //发送复位脉冲
delay(80); //延时(>480us)
DQ=1; //拉高数据线
delay(5); //等待(15~60us)
x=DQ; //用X的值来判断初始化有没有成功,18B20存在的话X=0,否则X=1
delay(20);
}
//读一个字节
ReadOneChar(void) //主机数据线先从高拉至低电平1us以上,再使数据线升为高电平,从而产生读信号
{
unsigned char i=0; //每个读周期最短的持续时间为60us,各个读周期之间必须有1us以上的高电平恢复期
unsigned char dat=0;
for (i=8;i>0;i--) //一个字节有8位
{
DQ=1;
delay(1);
DQ=0;
dat>>=1;
DQ=1;
if(DQ)
dat|=0x80;
delay(4);
}
return(dat);
}
//写一个字节
void WriteOneChar(unsigned char dat)
{
unsigned char i=0; //数据线从高电平拉至低电平,产生写起始信号。15us之内将所需写的位送到数据线上,
for(i=8;i>0;i--) //在15~60us之间对数据线进行采样,如果是高电平就写1,低写0发生。
{
DQ=0; //在开始另一个写周期前必须有1us以上的高电平恢复期。
DQ=dat&0x01;
delay(5);
DQ=1;
dat>>=1;
}
delay(4);
}
//读温度值(低位放tempL;高位放tempH;)
void ReadTemperature(void)
{
Init_DS18B20(); //初始化
WriteOneChar(0xcc); //跳过读序列号的操作
WriteOneChar(0x44); //启动温度转换
delay(125); //转换需要一点时间,延时
Init_DS18B20(); //初始化
WriteOneChar(0xcc); //跳过读序列号的操作
WriteOneChar(0xbe); //读温度寄存器(头两个值分别为温度的低位和高位)
tempL=ReadOneChar(); //读出温度的低位LSB
tempH=ReadOneChar(); //读出温度的高位MSB
if(tempH>0x7f) //最高位为1时温度是负
{
tempL=~tempL; //补码转换,取反加一
tempH=~tempH+1;
fg=0; //读取温度为负时fg=0
}
sdata = tempL/16+tempH*16; //整数部分
xiaoshu1 = (tempL&0x0f)*10/16; //小数第一位
xiaoshu2 = (tempL&0x0f)*100/16%10; //小数第二位
xiaoshu=xiaoshu1*10+xiaoshu2; //小数两位
if(fg==0)
{
sdata=sdata-15;
xiaoshu1=xiaoshu1-9;
}
}
复制
十、TCL2543(ADC)
#define ulong unsigned long
ulong volt;//测量的电压值
sbit CLK=P3^3;//定义时钟信号口
sbit DIN=P3^1;//定义2543数据写入口
sbit DOUT=P3^0;//定义2543数据读取口
sbit CS=P3^2;//定义2543片选信号口
void read2543(uchar addr)
{
uint ad=0;
uchar i;
CLK=0;
CS=0;//片选段,启动2543
addr<<=4;//对地址位预处理
for(i=0;i<12;i++) //12个时钟走完,完成一次读取测量
{
if(DOUT==1)
ad=ad|0x01;//单片机读取ad数据
DIN=addr&0x80;//2543读取测量地址位
CLK=1;
;;;//很短的延时
CLK=0;//产生下降沿,产生时钟信号
;;;
addr<<=1;
ad<<=1;//将数据移位准备下一位的读写
}
CS=1;//关2543
ad>>=1;
volt=ad;//取走转换结果
volt=volt*1221;//例子的满量程为5V,转换分辩率为12位(2的12次方=4096) 。即最大值是255,5/4096=1221mV,即例子中的1V代表实际1221mV
}
复制
十一、LCD12864
sbit wr=P2^0; //数据写
sbit rd=P2^1; //数据读
sbit ce=P2^2; //片选
sbit cd=P2^3; //指令数据通道,1指令,0数据
sbit rst=P2^4; //复位信号
uchar code HZ0[][32]={
{0x10,0x40,0x10,0x40,0x3F,0x7E,0x28,0x90,0x45,0x08,0x82,0x80,0x0C,0x60,0x30,0x18,
0xCF,0xE6,0x00,0x00,0x1F,0xF0,0x10,0x10,0x10,0x10,0x10,0x10,0x1F,0xF0,0x10,0x10},/*"答",0*/
};
uchar code SZ[][16]={
{0x00,0x00,0x00,0x18,0x24,0x42,0x42,0x42,0x42,0x42,0x42,0x42,0x24,0x18,0x00,0x00},/*"0",0*/
{0x00,0x00,0x00,0x08,0x38,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x08,0x3E,0x00,0x00},/*"1",1*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x42,0x02,0x04,0x08,0x10,0x20,0x42,0x7E,0x00,0x00},/*"2",2*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x02,0x04,0x18,0x04,0x02,0x42,0x42,0x3C,0x00,0x00},/*"3",3*/
{0x00,0x00,0x00,0x04,0x0C,0x0C,0x14,0x24,0x24,0x44,0x7F,0x04,0x04,0x1F,0x00,0x00},/*"4",4*/
{0x00,0x00,0x00,0x7E,0x40,0x40,0x40,0x78,0x44,0x02,0x02,0x42,0x44,0x38,0x00,0x00},/*"5",5*/
{0x00,0x00,0x00,0x18,0x24,0x40,0x40,0x5C,0x62,0x42,0x42,0x42,0x22,0x1C,0x00,0x00},/*"6",6*/
{0x00,0x00,0x00,0x7E,0x42,0x04,0x04,0x08,0x08,0x10,0x10,0x10,0x10,0x10,0x00,0x00},/*"7",7*/
{0x00,0x00,0x00,0x3C,0x42,0x42,0x42,0x24,0x18,0x24,0x42,0x42,0x42,0x3C,0x00,0x00},/*"8",8*/
{0x00,0x00,0x00,0x38,0x44,0x42,0x42,0x42,0x46,0x3A,0x02,0x02,0x24,0x18,0x00,0x00},/*"9",9*/
{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00},/*" ",10*/
};
void delay(uint t) //延时函数
{
uint i,j;
for(i=0;i<1;i++);
}
uchar read_status() //读取lcd12864的状态
{
uchar status;
P0=0;//端口b置为输入
rd=0;
wr=1;
ce=0;
cd=1;
status=P1;
return status;
}
void check_status()//检查lcd12864的状态
{
uchar s;
P0=0Xff;//端口b置为输出
while((s&0x80)!=0x80)
s=read_status();//等待位1,2置为。命令读写准备好。数据读写准备好
}
void write_data(uchar dat)//写数据
{
rd=1;
cd=0;
ce=0;
wr=0;
P0=dat;
delay(1);
wr=1;
ce=1;
cd=1;
}
void write_cmd1(uchar cmd)//写数据1
{
rd=1;
cd=1;
ce=0;
wr=0;
P0=cmd;
delay(1);
wr=1;
ce=1;
cd=0;
}
//先送参数,再送指令
void write_cmd2(uchar dat,uchar cmd)
{
check_status();
write_data(dat);
check_status();
write_cmd1(cmd);
}
void write_cmd3(uchar data1,uchar data2,uchar cmd)//发送参数并发指令再发送数据
{
check_status();
write_data(data1);
check_status();
write_data(data2);
check_status();
write_cmd1(cmd);
}
void init()//LCD12864的初始化
{
P2=0Xff;
P1=0Xff;
rst=1;
delay(10);
rst=0;
wr=1;
rd=1;
ce=1;
cd=1;
rst=1;
check_status();
write_cmd3(0x01,0x00,0x21);//光标指针设置
check_status();
write_cmd3(0x00,0x00,0x42);//图形区首地址
check_status();
write_cmd3(16,0x00,0x43);//图形区宽度
check_status();
write_cmd1(0x80);//显示方式设置,正常显示
check_status();
write_cmd1(0x98);//图形方式显示,不显示字母,只打点
check_status();
write_cmd1(0xa0);//光标形状设置1 0 1 0 0 N2 N1 N0
}
//汉字显示函数,处在x y处显示汉字
void display_HZ(uchar x,uchar y,uchar *hz)////x 0-3 y 0-7
{
uchar i,j=0;
for(i=0;i<16;i++)
{
write_cmd3(((j/2)<<4)|(y*2),x,0x24);//地址指针设置..低地址,高地址,命令
write_cmd2(hz[j++],0xc0);
write_cmd2(hz[j++],0xc0);
}
}
void display_SZ(uchar x,uchar y,uchar *hz)////x 0-3 y 0-14
{
uchar i,j=0;
for(i=0;i<16;i++)
{
write_cmd3(((j)<<4)|y,x,0x24);//地址指针设置..低地址,高地址,命令
write_cmd2(hz[j++],0xc0);
}
}
void CLear_N(uchar num)
{
uchar i;
for(i=0;i<15;i++)
{
display_HZ(num,i,SZ[10]);
}
}
//display_SZ(0,0,SZ[0]);
//display_HZ(0,0,HZ0[0]);
复制
十二、AT24C02(掉电存储)
sbit I2C_SDA = P1^1; //控制24c02的SDA引脚
sbit I2C_SCL = P1^2; //控制24c02的SCL引脚
void I2C_Delay10us()//IIC协议所需:延迟10us函数
{
uchar a, b;
for(b=1; b>0; b--)
{
for(a=2; a>0; a--);
}
}
void I2C_Start() //开始启动IIC,IIC协议头
{
I2C_SDA = 1;
I2C_Delay10us();
I2C_SCL = 1;
I2C_Delay10us();//建立时间是I2C_SDA保持时间>4.7us
I2C_SDA = 0;
I2C_Delay10us();//保持时间是>4us
I2C_SCL = 0;
I2C_Delay10us();
}
void I2C_Stop() //停止IIC,IIC协议尾
{
I2C_SDA = 0;
I2C_Delay10us();
I2C_SCL = 1;
I2C_Delay10us();//建立时间大于4.7us
I2C_SDA = 1;
I2C_Delay10us();
}
/*******************************************************************************
* 函 数 名 : I2cSendByte(uchar num)
* 函数功能 : 通过I2C发送一个字节。在I2C_SCL时钟信号高电平期间,
* * 保持发送信号I2C_SDA保持稳定
* 输 入 : num ,ack
* 输 出 : 0或1。发送成功返回1,发送失败返回0
* 备 注 : 发送完一个字节I2C_SCL=0, 需要应答则应答设置为1,否则为0
*******************************************************************************/
uchar I2C_SendByte(uchar dat, uchar ack)
{
uchar a = 0,b = 0;//最大255,一个机器周期为1us,最大延时255us。
for(a=0; a<8; a++)//要发送8位,从最高位开始
{
I2C_SDA = dat >> 7; //起始信号之后I2C_SCL=0,所以可以直接改变I2C_SDA信号
dat = dat << 1;
I2C_Delay10us();
I2C_SCL = 1;
I2C_Delay10us();//建立时间>4.7us
I2C_SCL = 0;
I2C_Delay10us();//时间大于4us
}
I2C_SDA = 1;
I2C_Delay10us();
I2C_SCL = 1;
while(I2C_SDA && (ack == 1))//等待应答,也就是等待从设备把I2C_SDA拉低
{
b++;
if(b > 200) //如果超过200us没有应答发送失败,或者为非应答,表示接收结束
{
I2C_SCL = 0;
I2C_Delay10us();
return 0;
}
}
I2C_SCL = 0;
I2C_Delay10us();
return 1;
}
uchar I2C_ReadByte() //IIC协议读取数据
{
uchar a = 0,dat = 0;
I2C_SDA = 1; //起始和发送一个字节之后I2C_SCL都是0
I2C_Delay10us();
for(a=0; a<8; a++)//接收8个字节
{
I2C_SCL = 1;
I2C_Delay10us();
dat <<= 1;
dat |= I2C_SDA;
I2C_Delay10us();
I2C_SCL = 0;
I2C_Delay10us();
}
return dat;
}
/*******************************************************************************
* 函 数 名 : void At24c02Write(unsigned char addr,unsigned char dat)
* 函数功能 : 写入24c02的一个地址的一个数据
*******************************************************************************/
void At24c02Write(unsigned char addr,unsigned char dat)
{
I2C_Start();
I2C_SendByte(0xa0, 1);//发送写器件地址
I2C_SendByte(addr, 1);//发送要写入内存地址
I2C_SendByte(dat, 0); //发送数据
I2C_Stop();
}
/*******************************************************************************
* 函 数 名 : unsigned char At24c02Read(unsigned char addr)
* 函数功能 : 读取24c02的一个地址的一个数据
*******************************************************************************/
unsigned char At24c02Read(unsigned char addr)
{
unsigned char num;
I2C_Start();
I2C_SendByte(0xa0, 1); //发送写器件地址
I2C_SendByte(addr, 1); //发送要读取的地址
I2C_Start();
I2C_SendByte(0xa1, 1); //发送读器件地址
num=I2C_ReadByte(); //读取数据
I2C_Stop();
return num;
}
复制
十三、超声波
#include
sbit Trig = P1^1;
sbit Echo = P1^0;
unsigned long S=0;
bit flag =0;
unsigned int DIstance,time;
void StartModule() //启动模块
{
Trig=1; //启动一次模块
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
Trig=0;
}
void Conut(void)
{
StartModule();
while(!Echo); //当RX为零时等待
TR0=1; //开启计数
while(Echo); //当RX为1计数并等待
TR0=0; //关闭计数
time=TH0*256+TL0;
TH0=0;
TL0=0;
S=(time*1.7)/100; //算出来是CM
DIstance = S;
if((S>=700)||flag==1) //超出测量范围显示“-”
{
flag=0;
DisplayOneChar(0, 1, '0');
DisplayOneChar(1, 1, '.'); //显示点
DisplayOneChar(2, 1, '0');
DisplayOneChar(3, 1, '0');
DisplayOneChar(4, 1, 'M'); //显示M
}
else
{
DisplayOneChar(0, 1, (char)(S/100+'0'));
DisplayOneChar(1, 1, '.'); //显示点
DisplayOneChar(2, 1, (char)(S/10%10+'0'));
DisplayOneChar(3, 1, (char)(S%10+'0'));
DisplayOneChar(4, 1, 'M'); //显示M
}
}
void zd0() interrupt 1 //T0中断用来计数器溢出,超过测距范围
{
flag=1; //中断溢出标志
}
void Sr04_Init()
{
TMOD=0x01; //设T0为方式1,GATE=1;
TH0=0;
TL0=0;
ET0=1; //允许T0中断
EA=1; //开启总中断
}
复制
十四、DS1302(RTC时钟)
//DS1302引脚定义
sbit RST=P1^3;
sbit IO=P1^2;
sbit SCK=P1^1;
//DS1302地址定义
#define ds1302_sec_add 0x80 //秒数据地址
#define ds1302_min_add 0x82 //分数据地址
#define ds1302_hr_add 0x84 //时数据地址
#define ds1302_date_add 0x86 //日数据地址
#define ds1302_month_add 0x88 //月数据地址
#define ds1302_day_add 0x8a //星期数据地址
#define ds1302_year_add 0x8c //年数据地址
#define ds1302_control_add 0x8e //控制数据地址
#define ds1302_charger_add 0x90
#define ds1302_clkburst_add 0xbe
//初始时间定义
uchar time_buf[8] = {0x20,0x10,0x06,0x01,0x23,0x59,0x55,0x02};//初始时间2010年6月1号23点59分55秒 星期二
uchar dis_time_buf[16]={0};
//DS1302初始化函数
void ds1302_init(void)
{
RST=0; //RST脚置低
SCK=0; //SCK脚置低
}
//向DS1302写入一字节数据
void ds1302_write_byte(uchar addr, uchar d)
{
uchar i;
RST=1; //启动DS1302总线
//写入目标地址:addr
addr = addr & 0xFE; //最低位置零,寄存器0位为0时写,为1时读
for (i = 0; i < 8; i ++) {
if (addr & 0x01) {
IO=1;
}
else {
IO=0;
}
SCK=1; //产生时钟
SCK=0;
addr = addr >> 1;
}
//写入数据:d
for (i = 0; i < 8; i ++) {
if (d & 0x01) {
IO=1;
}
else {
IO=0;
}
SCK=1; //产生时钟
SCK=0;
d = d >> 1;
}
RST=0; //停止DS1302总线
}
//从DS1302读出一字节数据
uchar ds1302_read_byte(uchar addr) {
uchar i,temp;
RST=1; //启动DS1302总线
//写入目标地址:addr
addr = addr | 0x01; //最低位置高,寄存器0位为0时写,为1时读
for (i = 0; i < 8; i ++) {
if (addr & 0x01) {
IO=1;
}
else {
IO=0;
}
SCK=1;
SCK=0;
addr = addr >> 1;
}
//输出数据:temp
for (i = 0; i < 8; i ++) {
temp = temp >> 1;
if (IO) {
temp |= 0x80;
}
else {
temp &= 0x7F;
}
SCK=1;
SCK=0;
}
RST=0; //停止DS1302总线
return temp;
}
//向DS302写入时钟数据
void ds1302_write_time(void)
{
ds1302_write_byte(ds1302_control_add,0x00); //关闭写保护
ds1302_write_byte(ds1302_sec_add,0x80); //暂停时钟
//ds1302_write_byte(ds1302_charger_add,0xa9); //涓流充电
ds1302_write_byte(ds1302_year_add,time_buf[1]); //年
ds1302_write_byte(ds1302_month_add,time_buf[2]); //月
ds1302_write_byte(ds1302_date_add,time_buf[3]); //日
ds1302_write_byte(ds1302_hr_add,time_buf[4]); //时
ds1302_write_byte(ds1302_min_add,time_buf[5]); //分
ds1302_write_byte(ds1302_sec_add,time_buf[6]); //秒
ds1302_write_byte(ds1302_day_add,time_buf[7]); //周
ds1302_write_byte(ds1302_control_add,0x80); //打开写保护
}
//从DS302读出时钟数据
void ds1302_read_time(void)
{
time_buf[1]=ds1302_read_byte(ds1302_year_add); //年
time_buf[2]=ds1302_read_byte(ds1302_month_add); //月
time_buf[3]=ds1302_read_byte(ds1302_date_add); //日
time_buf[4]=ds1302_read_byte(ds1302_hr_add); //时
time_buf[5]=ds1302_read_byte(ds1302_min_add); //分
time_buf[6]=(ds1302_read_byte(ds1302_sec_add))&0x7f;//秒,屏蔽秒的第7位,避免超出59
time_buf[7]=ds1302_read_byte(ds1302_day_add); //周
}
void Read_time()
{
ds1302_read_time(); //读取时间
dis_time_buf[0]=(time_buf[0]>>4); //年
dis_time_buf[1]=(time_buf[0]&0x0f);
dis_time_buf[2]=(time_buf[1]>>4);
dis_time_buf[3]=(time_buf[1]&0x0f);
dis_time_buf[4]=(time_buf[2]>>4); //月
dis_time_buf[5]=(time_buf[2]&0x0f);
dis_time_buf[6]=(time_buf[3]>>4); //日
dis_time_buf[7]=(time_buf[3]&0x0f);
dis_time_buf[14]=(time_buf[7]&0x07); //星期
//第2行显示
dis_time_buf[8]=(time_buf[4]>>4); //时
dis_time_buf[9]=(time_buf[4]&0x0f);
dis_time_buf[10]=(time_buf[5]>>4); //分
dis_time_buf[11]=(time_buf[5]&0x0f);
dis_time_buf[12]=(time_buf[6]>>4); //秒
dis_time_buf[13]=(time_buf[6]&0x0f);
}
复制
十五、OLED
typedef unsigned int u16; //对数据类型进行声明定义
typedef unsigned char u8;
#define u32 unsigned long
#define high 1
#define low 0
#define OLED_CMD 0 //写命令
#define OLED_DATA 1 //写数据
#define OLED_MODE 0
#define SIZE 8
#define XLevelL 0x00
#define XLevelH 0x10
#define Max_Column 128
#define Max_Row 64
#define Brightness 0xFF
#define X_WIDTH 128
#define Y_WIDTH 64
sbit SCL=P2^3;
sbit SDA=P2^4;
code unsigned char F6x8[][6] =
{
0x00, 0x00, 0x00, 0x00, 0x00, 0x00,// sp
0x00, 0x00, 0x00, 0x2f, 0x00, 0x00,// !
0x00, 0x00, 0x07, 0x00, 0x07, 0x00,// "
0x00, 0x14, 0x7f, 0x14, 0x7f, 0x14,// #
0x00, 0x24, 0x2a, 0x7f, 0x2a, 0x12,// $
0x00, 0x62, 0x64, 0x08, 0x13, 0x23,// %
0x00, 0x36, 0x49, 0x55, 0x22, 0x50,// &
0x00, 0x00, 0x05, 0x03, 0x00, 0x00,// '
0x00, 0x00, 0x1c, 0x22, 0x41, 0x00,// (
0x00, 0x00, 0x41, 0x22, 0x1c, 0x00,// )
0x00, 0x14, 0x08, 0x3E, 0x08, 0x14,// *
0x00, 0x08, 0x08, 0x3E, 0x08, 0x08,// +
0x00, 0x00, 0x00, 0xA0, 0x60, 0x00,// ,
0x00, 0x08, 0x08, 0x08, 0x08, 0x08,// -
0x00, 0x00, 0x60, 0x60, 0x00, 0x00,// .
0x00, 0x20, 0x10, 0x08, 0x04, 0x02,// /
0x00, 0x3E, 0x51, 0x49, 0x45, 0x3E,// 0
0x00, 0x00, 0x42, 0x7F, 0x40, 0x00,// 1
0x00, 0x42, 0x61, 0x51, 0x49, 0x46,// 2
0x00, 0x21, 0x41, 0x45, 0x4B, 0x31,// 3
0x00, 0x18, 0x14, 0x12, 0x7F, 0x10,// 4
0x00, 0x27, 0x45, 0x45, 0x45, 0x39,// 5
0x00, 0x3C, 0x4A, 0x49, 0x49, 0x30,// 6
0x00, 0x01, 0x71, 0x09, 0x05, 0x03,// 7
0x00, 0x36, 0x49, 0x49, 0x49, 0x36,// 8
0x00, 0x06, 0x49, 0x49, 0x29, 0x1E,// 9
0x00, 0x00, 0x36, 0x36, 0x00, 0x00,// :
0x00, 0x00, 0x56, 0x36, 0x00, 0x00,// ;
0x00, 0x08, 0x14, 0x22, 0x41, 0x00,// <
0x00, 0x14, 0x14, 0x14, 0x14, 0x14,// =
0x00, 0x00, 0x41, 0x22, 0x14, 0x08,// >
0x00, 0x02, 0x01, 0x51, 0x09, 0x06,// ?
0x00, 0x32, 0x49, 0x59, 0x51, 0x3E,// @
0x00, 0x7C, 0x12, 0x11, 0x12, 0x7C,// A
0x00, 0x7F, 0x49, 0x49, 0x49, 0x36,// B
0x00, 0x3E, 0x41, 0x41, 0x41, 0x22,// C
0x00, 0x7F, 0x41, 0x41, 0x22, 0x1C,// D
0x00, 0x7F, 0x49, 0x49, 0x49, 0x41,// E
0x00, 0x7F, 0x09, 0x09, 0x09, 0x01,// F
0x00, 0x3E, 0x41, 0x49, 0x49, 0x7A,// G
0x00, 0x7F, 0x08, 0x08, 0x08, 0x7F,// H
0x00, 0x00, 0x41, 0x7F, 0x41, 0x00,// I
0x00, 0x20, 0x40, 0x41, 0x3F, 0x01,// J
0x00, 0x7F, 0x08, 0x14, 0x22, 0x41,// K
0x00, 0x7F, 0x40, 0x40, 0x40, 0x40,// L
0x00, 0x7F, 0x02, 0x0C, 0x02, 0x7F,// M
0x00, 0x7F, 0x04, 0x08, 0x10, 0x7F,// N
0x00, 0x3E, 0x41, 0x41, 0x41, 0x3E,// O
0x00, 0x7F, 0x09, 0x09, 0x09, 0x06,// P
0x00, 0x3E, 0x41, 0x51, 0x21, 0x5E,// Q
0x00, 0x7F, 0x09, 0x19, 0x29, 0x46,// R
0x00, 0x46, 0x49, 0x49, 0x49, 0x31,// S
0x00, 0x01, 0x01, 0x7F, 0x01, 0x01,// T
0x00, 0x3F, 0x40, 0x40, 0x40, 0x3F,// U
0x00, 0x1F, 0x20, 0x40, 0x20, 0x1F,// V
0x00, 0x3F, 0x40, 0x38, 0x40, 0x3F,// W
0x00, 0x63, 0x14, 0x08, 0x14, 0x63,// X
0x00, 0x07, 0x08, 0x70, 0x08, 0x07,// Y
0x00, 0x61, 0x51, 0x49, 0x45, 0x43,// Z
0x00, 0x00, 0x7F, 0x41, 0x41, 0x00,// [
0x00, 0x55, 0x2A, 0x55, 0x2A, 0x55,// 55
0x00, 0x00, 0x41, 0x41, 0x7F, 0x00,// ]
0x00, 0x04, 0x02, 0x01, 0x02, 0x04,// ^
0x00, 0x40, 0x40, 0x40, 0x40, 0x40,// _
0x00, 0x00, 0x01, 0x02, 0x04, 0x00,// '
0x00, 0x20, 0x54, 0x54, 0x54, 0x78,// a
0x00, 0x7F, 0x48, 0x44, 0x44, 0x38,// b
0x00, 0x38, 0x44, 0x44, 0x44, 0x20,// c
0x00, 0x38, 0x44, 0x44, 0x48, 0x7F,// d
0x00, 0x38, 0x54, 0x54, 0x54, 0x18,// e
0x00, 0x08, 0x7E, 0x09, 0x01, 0x02,// f
0x00, 0x18, 0xA4, 0xA4, 0xA4, 0x7C,// g
0x00, 0x7F, 0x08, 0x04, 0x04, 0x78,// h
0x00, 0x00, 0x44, 0x7D, 0x40, 0x00,// i
0x00, 0x40, 0x80, 0x84, 0x7D, 0x00,// j
0x00, 0x7F, 0x10, 0x28, 0x44, 0x00,// k
0x00, 0x00, 0x41, 0x7F, 0x40, 0x00,// l
0x00, 0x7C, 0x04, 0x18, 0x04, 0x78,// m
0x00, 0x7C, 0x08, 0x04, 0x04, 0x78,// n
0x00, 0x38, 0x44, 0x44, 0x44, 0x38,// o
0x00, 0xFC, 0x24, 0x24, 0x24, 0x18,// p
0x00, 0x18, 0x24, 0x24, 0x18, 0xFC,// q
0x00, 0x7C, 0x08, 0x04, 0x04, 0x08,// r
0x00, 0x48, 0x54, 0x54, 0x54, 0x20,// s
0x00, 0x04, 0x3F, 0x44, 0x40, 0x20,// t
0x00, 0x3C, 0x40, 0x40, 0x20, 0x7C,// u
0x00, 0x1C, 0x20, 0x40, 0x20, 0x1C,// v
0x00, 0x3C, 0x40, 0x30, 0x40, 0x3C,// w
0x00, 0x44, 0x28, 0x10, 0x28, 0x44,// x
0x00, 0x1C, 0xA0, 0xA0, 0xA0, 0x7C,// y
0x00, 0x44, 0x64, 0x54, 0x4C, 0x44,// z
0x14, 0x14, 0x14, 0x14, 0x14, 0x14,// horiz lines
};
code unsigned char F8X16[]=
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,// 0
0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//! 1
0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//" 2
0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//# 3
0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$ 4
0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//% 5
0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//& 6
0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//' 7
0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//( 8
0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//) 9
0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//* 10
0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+ 11
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//, 12
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//- 13
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//. 14
0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,/// 15
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//0 16
0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//1 17
0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//2 18
0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//3 19
0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//4 20
0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//5 21
0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//6 22
0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//7 23
0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//8 24
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//9 25
0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//: 26
0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//; 27
0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//< 28
0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//= 29
0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,//> 30
0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//? 31
0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@ 32
0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A 33
0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B 34
0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08,0x00,//C 35
0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D 36
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E 37
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F 38
0xC0,0x30,0x08,0x08,0x08,0x38,0x00,0x00,0x07,0x18,0x20,0x20,0x22,0x1E,0x02,0x00,//G 39
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H 40
0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I 41
0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J 42
0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K 43
0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L 44
0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M 45
0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N 46
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O 47
0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P 48
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q 49
0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R 50
0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S 51
0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T 52
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U 53
0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V 54
0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W 55
0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X 56
0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y 57
0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z 58
0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[ 59
0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,// 60
0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//] 61
0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^ 62
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_ 63
0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//` 64
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a 65
0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b 66
0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c 67
0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d 68
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e 69
0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f 70
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g 71
0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h 72
0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i 73
0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j 74
0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k 75
0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l 76
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m 77
0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n 78
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o 79
0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p 80
0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q 81
0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r 82
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s 83
0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t 84
0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u 85
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v 86
0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w 87
0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x 88
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y 89
0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z 90
0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{ 91
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//| 92
0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//} 93
0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~ 94
};
/**********************************************
//IIC Start
**********************************************/
void IIC_Start()
{
SCL = high;
SDA = high;
SDA = low;
SCL = low;
}
/**********************************************
//IIC Stop
**********************************************/
void IIC_Stop()
{
SCL = low;
SDA = low;
SCL = high;
SDA = high;
}
/**********************************************
// IIC Write byte
**********************************************/
void Write_IIC_Byte(unsigned char IIC_Byte)
{
unsigned char i;
for(i=0;i<8;i++)
{
if(IIC_Byte & 0x80)
SDA=high;
else
SDA=low;
SCL=high;
SCL=low;
IIC_Byte<<=1;
}
SDA=1;
SCL=1;
SCL=0;
}
/**********************************************
// IIC Write Command
**********************************************/
void Write_IIC_Command(unsigned char IIC_Command)
{
IIC_Start();
Write_IIC_Byte(0x78); //Slave address,SA0=0
Write_IIC_Byte(0x00); //write command
Write_IIC_Byte(IIC_Command);
IIC_Stop();
}
/**********************************************
// IIC Write Data
**********************************************/
void Write_IIC_Data(unsigned char IIC_Data)
{
IIC_Start();
Write_IIC_Byte(0x78); //D/C#=0; R/W#=0
Write_IIC_Byte(0x40); //write data
Write_IIC_Byte(IIC_Data);
IIC_Stop();
}
void Delay_50ms(unsigned int Del_50ms)
{
unsigned int m;
for(;Del_50ms>0;Del_50ms--)
for(m=6245;m>0;m--);
}
void Delay_1ms(unsigned int Del_1ms)
{
unsigned char j;
while(Del_1ms--)
{
for(j=0;j<123;j++);
}
}
/********************************************
// fill_Picture
********************************************/
void fill_picture(unsigned char fill_Data)
{
unsigned char m,n;
for(m=0;m<8;m++)
{
Write_IIC_Command(0xb0+m); //page0-page1
Write_IIC_Command(0x00); //low column start address
Write_IIC_Command(0x10); //high column start address
for(n=0;n<132;n++)
{
Write_IIC_Data(fill_Data);
}
}
}
void OLED_WR_Byte(unsigned dat,unsigned cmd)
{
if(cmd)
{
Write_IIC_Data(dat);
}
else {
Write_IIC_Command(dat);
}
}
void OLED_Set_Pos(unsigned char x, unsigned char y)
{
OLED_WR_Byte(0xb0+y,OLED_CMD);
OLED_WR_Byte(((x&0xf0)>>4)|0x10,OLED_CMD);
OLED_WR_Byte((x&0x0f),OLED_CMD);
}
//开启OLED显示
void OLED_Display_On(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC命令
OLED_WR_Byte(0X14,OLED_CMD); //DCDC ON
OLED_WR_Byte(0XAF,OLED_CMD); //DISPLAY ON
}
//关闭OLED显示
void OLED_Display_Off(void)
{
OLED_WR_Byte(0X8D,OLED_CMD); //SET DCDC命令
OLED_WR_Byte(0X10,OLED_CMD); //DCDC OFF
OLED_WR_Byte(0XAE,OLED_CMD); //DISPLAY OFF
}
//清屏函数,清完屏,整个屏幕是黑色的!和没点亮一样!!!
void OLED_Clear(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte (0xb0+i,OLED_CMD); //设置页地址(0~7)
OLED_WR_Byte (0x00,OLED_CMD); //设置显示位置—列低地址
OLED_WR_Byte (0x10,OLED_CMD); //设置显示位置—列高地址
for(n=0;n<128;n++)OLED_WR_Byte(0,OLED_DATA);
} //更新显示
}
void OLED_On(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte (0xb0+i,OLED_CMD); //设置页地址(0~7)
OLED_WR_Byte (0x00,OLED_CMD); //设置显示位置—列低地址
OLED_WR_Byte (0x10,OLED_CMD); //设置显示位置—列高地址
for(n=0;n<128;n++)OLED_WR_Byte(1,OLED_DATA);
} //更新显示
}
//在指定位置显示一个字符,包括部分字符
//x:0~127
//y:0~63
//mode:0,反白显示;1,正常显示
//size:选择字体 16/12
void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 Char_Size)
{
unsigned char c=0,i=0;
c=chr-' ';//得到偏移后的值
if(x>Max_Column-1){x=0;y=y+2;}
if(Char_Size ==16)
{
OLED_Set_Pos(x,y);
for(i=0;i<8;i++)
OLED_WR_Byte(F8X16[c*16+i],OLED_DATA);
OLED_Set_Pos(x,y+1);
for(i=0;i<8;i++)
OLED_WR_Byte(F8X16[c*16+i+8],OLED_DATA);
}
else {
OLED_Set_Pos(x,y);
for(i=0;i<6;i++)
OLED_WR_Byte(F6x8[c][i],OLED_DATA);
}
}
//m^n函数
u32 oled_pow(u8 m,u8 n)
{
u32 result=1;
while(n--)result*=m;
return result;
}
//显示2个数字
//x,y :起点坐标
//len :数字的位数
//size:字体大小
//mode:模式 0,填充模式;1,叠加模式
//num:数值(0~4294967295);
void OLED_ShowNum(u8 x,u8 y,u32 num,u8 len,u8 size2)
{
u8 t,temp;
u8 enshow=0;
for(t=0;t120){x=0;y+=2;}
j++;
}
}
void OLED_Init(void)
{
OLED_WR_Byte(0xAE,OLED_CMD);//--display off
OLED_WR_Byte(0x00,OLED_CMD);//---set low column address
OLED_WR_Byte(0x10,OLED_CMD);//---set high column address
OLED_WR_Byte(0x40,OLED_CMD);//--set start line address
OLED_WR_Byte(0xB0,OLED_CMD);//--set page address
OLED_WR_Byte(0x81,OLED_CMD); // contract control
OLED_WR_Byte(0xFF,OLED_CMD);//--128
OLED_WR_Byte(0xA1,OLED_CMD);//set segment remap
OLED_WR_Byte(0xA6,OLED_CMD);//--normal / reverse
OLED_WR_Byte(0xA8,OLED_CMD);//--set multiplex ratio(1 to 64)
OLED_WR_Byte(0x3F,OLED_CMD);//--1/32 duty
OLED_WR_Byte(0xC8,OLED_CMD);//Com scan direction
OLED_WR_Byte(0xD3,OLED_CMD);//-set display offset
OLED_WR_Byte(0x00,OLED_CMD);//
OLED_WR_Byte(0xD5,OLED_CMD);//set osc division
OLED_WR_Byte(0x80,OLED_CMD);//
OLED_WR_Byte(0xD8,OLED_CMD);//set area color mode off
OLED_WR_Byte(0x05,OLED_CMD);//
OLED_WR_Byte(0xD9,OLED_CMD);//Set Pre-Charge Period
OLED_WR_Byte(0xF1,OLED_CMD);//
OLED_WR_Byte(0xDA,OLED_CMD);//set com pin configuartion
OLED_WR_Byte(0x12,OLED_CMD);//
OLED_WR_Byte(0xDB,OLED_CMD);//set Vcomh
OLED_WR_Byte(0x30,OLED_CMD);//
OLED_WR_Byte(0x8D,OLED_CMD);//set charge pump enable
OLED_WR_Byte(0x14,OLED_CMD);//
OLED_WR_Byte(0xAF,OLED_CMD);//--turn on oled panel
}
编辑:黄飞;t++)>
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
单片机
+关注
关注
6039文章
44586浏览量
636722 -
寄存器
+关注
关注
31文章
5357浏览量
120747 -
定时器
+关注
关注
23文章
3253浏览量
115059 -
STC
+关注
关注
14文章
299浏览量
66302 -
GPIO
+关注
关注
16文章
1213浏览量
52205
发布评论请先 登录
相关推荐

AVR单片机 实验一 单片机基本输入输出(GPIO)实验
AVR单片机 实验一 单片机基本输入输出(GPIO)实验1 实验目的掌握ICCAVR 集成开发环境的使用;了解ATmega16单片机
发表于 11-14 20:36
•17次下载

航标项目中单片机STM32L151两个外部GPIO中断其中一个不能执行
问题:本项目同时开启了两个外部中断,其一,GPS模块1PPS引脚输出到单片机PA4引脚,先初始化,但始终不能进入中断;其二,BL8025模块
发表于 12-27 18:37
•1次下载
STM32单片机外部中断简介 STM32单片机外部中断的配置过程
STM32 单片机是一款高性能、低功耗的 32 位微控制器,具有强大的计算能力、灵活的外设模块以及优秀的扩展性,开发周期短、成本低。在单片机应用中,外部中断是一种重要的硬件触发方式,本
发表于 08-15 18:21
•3165次阅读
STM32单片机的GPIO输入、输出模式与配置方法
STM32 单片机是一款高性能、低功耗的 32 位微控制器,具有强大的计算能力、灵活的外设模块和实现微控制器应用所需的社区支持。在单片机应用中,GPIO 输入输出模式是必不可少的硬件接
发表于 08-15 18:23
•8519次阅读





 工商网监
工商网监
评论