 什么是陀螺仪 六轴陀螺仪MPU6050介绍
什么是陀螺仪 六轴陀螺仪MPU6050介绍
已经有很多大佬介绍过了MPU6050的协议、数据处理方式、滤波算法,所以这部分就不再复述了,本篇主要是针对看不懂长篇大论的小白的简易上手的方法。
首先呢还是得简单介绍下什么是陀螺仪:
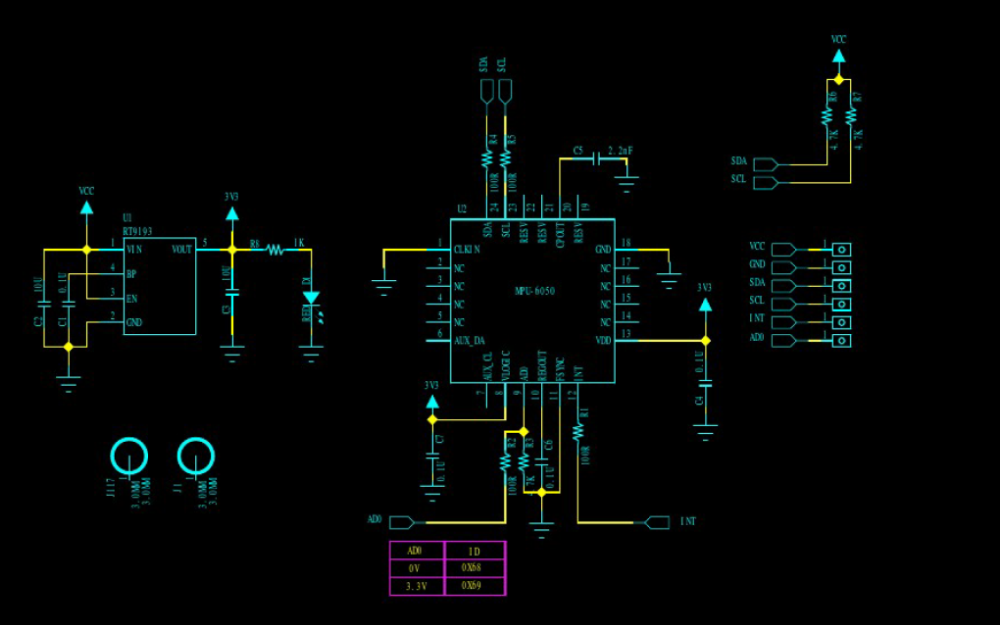
MPU-60X0是世界上第一款集成 6 轴MotionTracking设备。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器 DMP( DigitalMotion Processor),可用I2C接口连接一个第三方的数字传感器,比如磁力计。
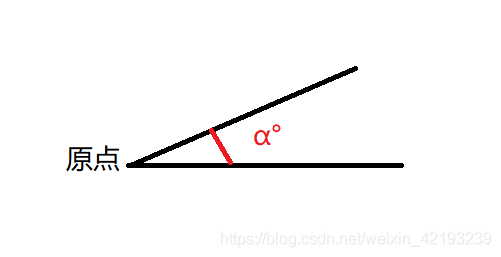
那么本篇文章呢,主要介绍通过复制粘贴的代码可以实现对当前角度的读取(软件IIC),检测三轴方向上的角度,如上图,假如该陀螺仪平放在水平面上,从侧面看为一个线段,现取一个顶点(圆点),让另一边绕该点旋转,形成一个角度的示意图,如下图,这样便呈现了一个角度,我们的单片机通过协议和处理方法,将这个角度读取出来(-90-90°),当换一个平面时,相同的绕圆点旋转便可以出现Y轴,
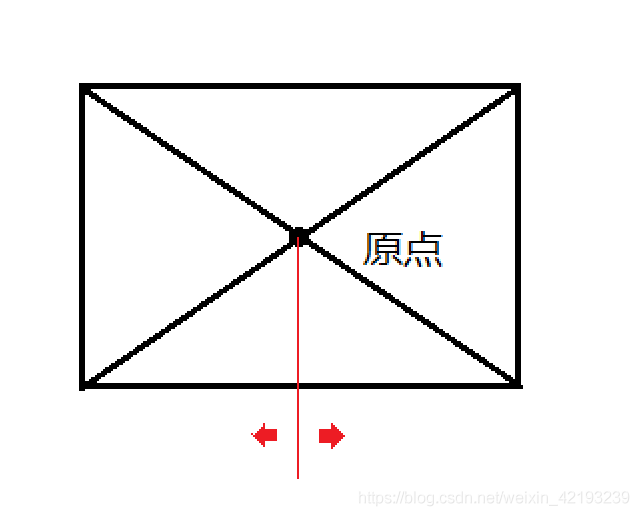
当如果我们想读取Z轴时(不常用),选择的方式是以该平面的中心为圆点进行旋转,可以得到一个角度值,该值通过本篇方法处理后有一定的偏差,常用的为X和Y轴
上面简单介绍了X、Y、Z轴读取后的数据分别代码什么内容,下面来讲解针对STM32平台的代码移植过程,本篇使用的方式为软件IIC(通过IO的读和写来实现数据读取,方便移植)
首先我们打开该工程的OLED_I2C.H文件(本文最下面附链,以STM32F1为例)
#define OLED_I2C I2C1
#define OLED_I2C_CLK RCC_APB1Periph_I2C1
#define OLED_I2C_CLK_INIT RCC_APB1PeriphClockCmd
#define OLED_I2C_SCL_PIN GPIO_Pin_6
#define OLED_I2C_SCL_GPIO_PORT GPIOB
#define OLED_I2C_SCL_GPIO_CLK RCC_AHB1Periph_GPIOB
#define OLED_I2C_SCL_SOURCE GPIO_PinSource6
#define OLED_I2C_SCL_AF GPIO_AF_I2C1
#define OLED_I2C_SDA_PIN GPIO_Pin_7
#define OLED_I2C_SDA_GPIO_PORT GPIOB
#define OLED_I2C_SDA_GPIO_CLK RCC_AHB1Periph_GPIOB
#define OLED_I2C_SDA_SOURCE GPIO_PinSource7
#define OLED_I2C_SDA_AF GPIO_AF_I2C1
void I2C_Configuration(void);
void I2C_WriteByte(uint8_t addr,uint8_t data);
void WriteCmd(unsigned char I2C_Command);
void WriteDat(unsigned char I2C_Data);
void OLED_Init(void);
void OLED_SetPos(unsigned char x, unsigned char y);
void OLED_Fill(unsigned char fill_Data);
void OLED_CLS(void);
void OLED_ON(void);
void OLED_OFF(void);
void OLED_ShowStr(unsigned char x, unsigned char y, unsigned char ch[], unsigned char TextSize);
void OLED_ShowCN(unsigned char x, unsigned char y, unsigned char N);
void OLED_DrawBMP(unsigned char x0,unsigned char y0,unsigned char x1,unsigned char y1,unsigned char BMP[]);
该头文件部分对使用到的引脚进行了声明,例如该工程中使用到的SCL引脚为PB6,SDA引脚为PB7,同时我们看一下OLED_I2C.C中是如何使用这些内容的
void I2C_Configuration(void)
{
I2C_InitTypeDef I2C_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
OLED_I2C_CLK_INIT(OLED_I2C_CLK,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitStructure.GPIO_Pin = OLED_I2C_SCL_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD; // 开漏输出
GPIO_Init(OLED_I2C_SCL_GPIO_PORT, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = OLED_I2C_SDA_PIN;
GPIO_Init(OLED_I2C_SDA_GPIO_PORT, &GPIO_InitStructure);
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;/* 高电平数据稳定,低电平数据变化 SCL 时钟线的占空比 */
I2C_InitStructure.I2C_OwnAddress1 = OLED_ADDRESS;//OLED的I2C地址
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;/* I2C的寻址模式 */
I2C_InitStructure.I2C_ClockSpeed = I2C_Speed;
I2C_Init(I2C1, &I2C_InitStructure); /* I2C1 初始化 */
I2C_Cmd(I2C1, ENABLE); /* 使能 I2C1 */
}
发现在该C文件中使用到初始化的部分都是通过#define的值进行调用的,所以!! 在本工程中只需要改动OLED_I2C.H种的内容就可以完全实现移植,兼容任何STM32的标准库
说完了移植代码,下面看一下如何获取数据:
首先在main()函数里面需要有两个初始化,
//I2C初始化
i2c_GPIO_Config();
//MPU6050初始化
MPU6050_Init();
while(MPU6050ReadID() == 0);
通过这两个初始化和再次校验,MPU6050的初始化就成功了,现在我们进入数据读取环节
/**
* @brief 读取MPU6050的加速度数据
* @param
* @retval
*/
void MPU6050ReadAcc(short *accData)
{
u8 buf[6];
MPU6050_ReadData(MPU6050_ACC_OUT, buf, 6);
accData[0] = (buf[0] << 8) | buf[1];
accData[1] = (buf[2] << 8) | buf[3];
accData[2] = (buf[4] << 8) | buf[5];
}
/**
* @brief 读取MPU6050的角加速度数据
* @param
* @retval
*/
void MPU6050ReadGyro(short *gyroData)
{
u8 buf[6];
MPU6050_ReadData(MPU6050_GYRO_OUT,buf,6);
gyroData[0] = (buf[0] << 8) | buf[1];
gyroData[1] = (buf[2] << 8) | buf[3];
gyroData[2] = (buf[4] << 8) | buf[5];
}
/**
* @brief 读取MPU6050的原始温度数据
* @param
* @retval
*/
void MPU6050ReadTemp(short *tempData)
{
u8 buf[2];
MPU6050_ReadData(MPU6050_RA_TEMP_OUT_H,buf,2); //读取温度值
*tempData = (buf[0] << 8) | buf[1];
}
所有的读取数据都是通过这三个函数实现的,经过上面的初始化后可以直接在主函数中进行使用,我们这里用到的主要是MPU6050ReadGyro()函数,函数内封装有数据转换,可以直接得到角度值,此时我们先新建一个变量
新建一个成员为3的数组,方便一次性获取X、Y、Z轴的数据,使用方式为:
MPU6050ReadGyro(Gyro);
JD1[0]=abs(Gyro[0])/100+'0';
JD1[1]=abs(Gyro[0])/10%10+'0';
JD1[2]=abs(Gyro[0])%10+'0';
该语句是将X轴的角度数据转换为字符串数据,方便新手下面通过串口输出数值进行转换
编辑:黄飞
-
陀螺仪
+关注
关注
44文章
784浏览量
98676 -
ST
+关注
关注
32文章
1133浏览量
128916 -
STM32
+关注
关注
2270文章
10897浏览量
355822 -
滤波算法
+关注
关注
2文章
89浏览量
13723 -
MPU6050
+关注
关注
39文章
307浏览量
71376
发布评论请先 登录
相关推荐
我为什么要用陀螺仪MPU6050的理由,你有吗?
什么是陀螺仪
陀螺仪MPU6050的相关资料推荐
三轴陀螺仪MPU6050的测试程序免费下载

模块介绍之六轴陀螺仪MPU6050篇(STM32基本使用)

【平衡小车制作】(四)陀螺仪MPU6050(超详解)





 工商网监
工商网监
评论