 你可能不知道单片机软件抗干扰技术有多么优秀!
你可能不知道单片机软件抗干扰技术有多么优秀!
电子仪器设备的抗干扰技术是一门博大精深的领域。大部分的电子设备所在的工作环境往往比较恶劣,干扰严重,这些干扰会严重影响设备的正常工作,使其不能正常运行,比如空调就工作在高温、大电流、强干扰(电机)的环境下。
因此,为了保证这些设备能在实际应用中可靠地工作,必须要周密考虑和解决抗干扰的问题。除了在硬件上考虑抗干扰的问题,我们也可以在软件上做一些抗干扰的措施,来提高系统的抗干扰能力。
下面简单介绍了几个抗干扰的措施,起一个抛砖引玉的作用,希望各位同事可以在工作中加以应用和完善。
一、数字量输入输出中的软件抗于扰
数字量输入过程中的干扰,其作用时间较短,因此在采集数字信号时,可多次重复采集,直到若干次采样结果一致时才认为其有效。例如通过A/D转换器测量各种模拟量时,如果有干扰作用于模拟信号上,就会使A/D转换结果偏离真实值。
这时如果只采样一次A/D转换结果,就无法知道其是否真实可靠,而必须进行多次采样,得到一个A/D转换结果的数据系列,对这一系列数据再作各种数字滤波处理,最后才能得到一个可信度较高的结果值。如果对于同一个数据点经多次采样后得到的信号值变化不定,说明此时的干扰特别严重,已经超出允许的范围,应该立即停止采样并给出报警信号。
如果数字信号属于开关量信号,如限位开关、操作按扭等,则不能用多次采样取平均值的方法,而必须每次采样结果绝对一致才行。这时可编写一个采样子程序,程序中设置有采样成功和采样失败标志,如果对同一开关量信号进行若干次采样,其采样结果完全一致,则成功标志置位;否则失败标志置位。后续程序可通过判别这些标志来决定程序的流向。
单片机控制的设备对外输出的控制信号很多是以数字量的形式出现的。单片机给出一个正确的数据后,由于外部干扰的作用有可能使输出装置得到一个被改变了的错误数据,从而使输出装置发生误动作。对于数字量输出软件抗干扰最有效的方法是重复输出同一个数据,重复周期应尽量短。这样输出装置在得到一个被干扰的错误信号后,还来不及反应,一个正确的信号又来到了,从而可以防止误动作的产生。
在程序结构上,可将输出过程安排在监控循环中。循环周期取得尽可能短,就能有效地防止输出设备的错误动作。需要注意的是。经过这种安排后输出功能是作为一个完整的模块来执行的,与这种重复输出措施相对应。
软件设计中还必须为各个外部输出设备建立一个输出暂存单元,每次将应输出的结果存入暂存单元中,然后再调用输出功能模块将各暂存单元的数据一一输出,不管该数据是刚送来的,还是以前就有的。
这样可以让每个外部设备不断得到控制数据,从而使干扰造成的错误状态不能得以维持。在执行输出功能模块时,应将有关输出接口芯片的初始状态也一并重新设置。
因为由于干扰的作用可能使这些芯片的工作方式控制字发生变化,而不能实现正确的输出功能,重新设置控制字就能避免这种错误.确保输出功能的正确实现。
二、程序执行过程中的软件抗于扰
前面述及的是针对输入输出通道而言的,干扰信号还未作用到CPU本身,CPU还能正确地执行各种抗干扰程序。如果干扰信号已经通过某种途径作用到了CPU上,则CPU就不能按正常状态执行程序,从而引起混乱,这就是通常所说的程序“跑飞”。
程序“跑飞”后使其恢复正常的一个最简单的方法是使CPU复位,让程序从头开始重新运行。很多单片机控制的设备中都有设置人工复位电路。人工复位一般是在整个系统已经完全瘫痪,无计可施的情况下才不得已而为之的。因此在进行软件设计时就要考虑到万一程序“跑飞”,应让其能够自动恢复到正常状态下运行。
程序“跑飞”后往往将一些操作数当作指令码来执行,从而引起整个程序的混乱。采用“指令冗余”是使“跑飞”的程序恢复正常的一种措施。
所谓“指令冗余”,就是在一些关键的地方人为地插入一些单字节的空操作指令NOP。当程序“跑飞”到某条单字节指令上时,就不会发生将操作数当成指令来执行的错误。对于MCS51单片机来说,所有的指令都不会超过3个字节,因此在某条指令前面插入两条NOP指令,则该条指令就不会被前面冲下来的失控程序拆散,而会得到完整的执行,从而使程序重新纳入正常轨道。通常是在一些对程序的流向起关键作用的指令前面插入两条NOP指令。应该注意的是在一个程序中“指令冗余”不能使用过多,否则会降低程序的执行效率。
采用“指令冗余”使“跑飞”的程序恢复正常是有条件的,首先“跑飞”的程序必须落到程序区,其次必须执行到所设置的冗余指令。如果“跑飞”的程序落到非程序区(如 EPROM中未用完的空间或某些数据表格等),或在执行到冗余指令之前已经形成了一个死循环,则“指令冗余”措施就不能使“跑飞”的程序恢复正常了。这时可以采用另一种软件抗干扰措施,即肠胃“软件陷阱”。
“软件陷阱”是一条引导指令,强行将捕获的程序引向一个指定的地址,在那里有一段专门处理错误的程序。假设这段处理错误的程序入口地址为ERR,则下面三条指令即组成一个“软件陷阱”:
NOP
NOP
JR ERR
如果“跑飞”的程序落到一个临时构成的死循环中时,冗余指令和软件陷阱都将无能为力。这时可以采用人工复位的方法使系统恢复正常,实际上可以设计一种模仿人工监测的“程序运行监视器”,俗称“看门狗”(WATCHDOG)。
WATCHDOG有如下特征:
(1)本身能独立工作,基本上不依赖于 CPU。CPU只在一个固定的时间间隔内与之打一次交道,表明整个系统“目前尚属正常”。
(2)当CPU落入死循环之后,能及时发现并使整个系统复位。
目前有很多单片机在内部已经集成了片内的硬件WATCHDOG电路,使用起来更为方便。也可以用软件程序来形成WATCHDOG。
例如可以采用单片机一个多于不用的定时器来形成10ms的软件WATCHDOG。软件WATCHDOG启动后,系统工作程序必须每隔小于10ms的时间重新设置定时器的计数初值。如果程序“跑飞”后执行不到这条指令,则在10ms之内即会产生一次定时器溢出中断,则定时器中断程序就可以处理系统“意外”的情况。
采用软件WATCHDOG有一个弱点,就是如果“跑飞”的程序使某些操作数变形成为了修改定时器功能的指令,则执行这种指令后软件WATCHDOG就会失效。因此软件WATCHDOG的可靠性不如硬件高。
-
单片机
+关注
关注
6032文章
44521浏览量
633104
发布评论请先 登录
相关推荐
XD08M3232红外感应单片机在智能垃圾桶抗干扰性分析
XD08M3232接近感应单片机在智能垃圾桶抗干扰性分析
关于陶瓷电路板你不知道的事
又一电工不知道,施耐德变频器怎么复位,如果不告诉你,你知道怎么复位吗?

十天学会单片机可能吗?单片机入门需要多久?

单片机图形化编程软件有哪些
做emwin应用,图片太大,单片机ROM存不下怎么解决?
这些你不知道的卧式共模电感的选型依据
单片机抗干扰措施有哪些?

影响单片机硬件系统可靠运行的干扰因素
ADuCM360运行例程程序,在手接触到电路板或电源线的时候会导致单片机重启是为什么?
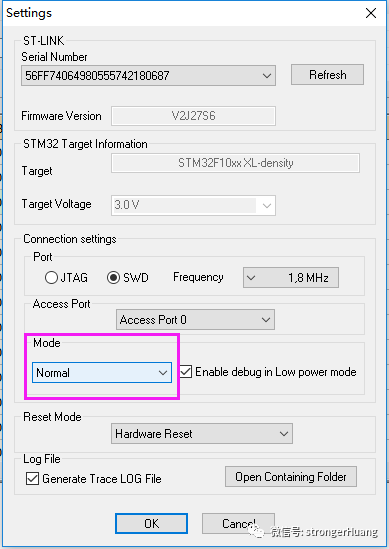
分享一下用ST-LINK Utility识别单片机程序是否跑飞





 工商网监
工商网监
评论