 加快风扇速度控制设计
加快风扇速度控制设计
讨论了控制无刷直流冷却风扇的速度。图中显示了分立式和IC风扇速度控制器的示例。本文介绍了 12V、24V 和 48V 设计以及隔离版本。讨论了用于速度控制的转速表反馈。
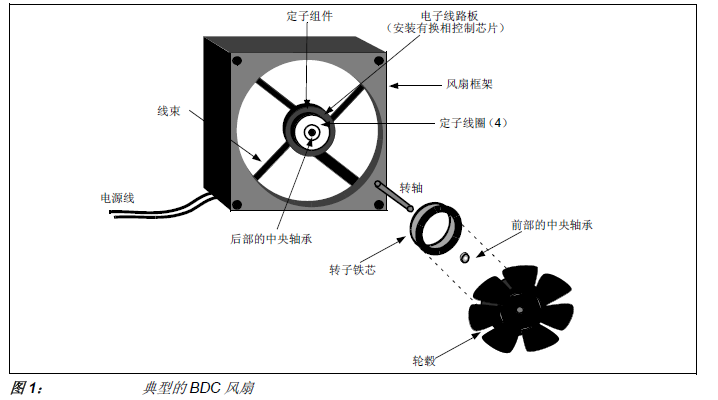
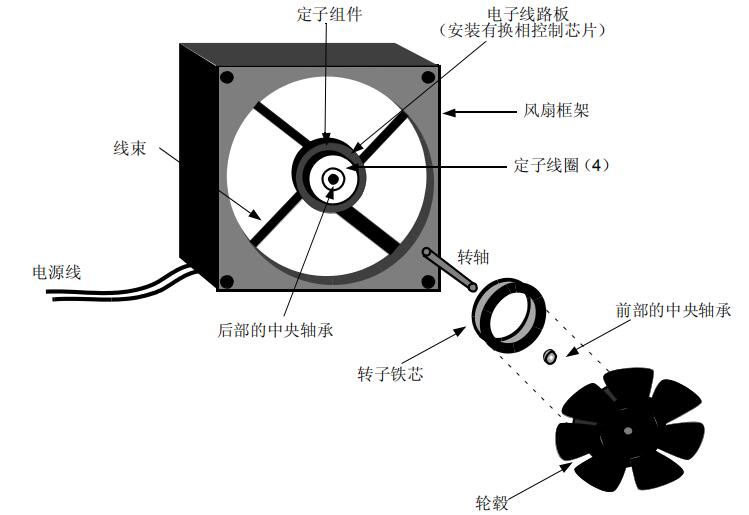
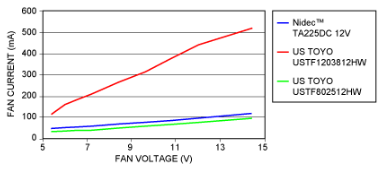
PC和其他类型电子设备中常用的无刷直流风扇的速度控制因其非线性行为而变得复杂。如图1所示,在电压达到高度可变的启动电压之前,电机根本不运行,并且速度仅近似线性超过该点。
图1.此图显示了典型无刷直流风扇的电压与速度的关系。风扇转动在 3V 至 5V 之间启动,但很难预测确切的启动电压。确切的点因风扇的使用寿命和环境条件而异。尽管该图在起点上方是线性的,但大多数风扇仅近似于电压与速度的线性关系。闭环风扇速度调节克服了所有这些困难。
调节风扇速度的电路可以克服这些困难。带转速计输出的电机的可用性有助于这些电路的设计。
基本的风扇控制放大器
一段时间以来,已经有集成电路(IC)可用,其中包括用于控制风扇速度的DAC(数模转换器)。这些电路包括PC系统健康监测器和专用风扇控制IC,如MAX1669,具有线性DAC输出和PWM输出。虽然这些IC主要设计用于PC,但已用于其他类型的电子设备。他们配备了I2C 或 SMBus 接口,用于与控制器、处理器或计算机进行通信。通常,DAC输出被馈入两种类型的模拟放大器电路中的任何一种,以升压其电压输出,以应用于风扇。
这些系统是“开环”的,并受启动电压要求的约束。一种常见的方法是在降低风扇以达到所需速度之前,将全电压馈送到风扇一小段间隔。最低可行速度是根据经验确定的,由于它随时间和条件而变化,因此需要不断重新验证。
图2描述了一个简单的基于DAC的开环风扇控制的原理图。它受启动限制的约束。虽然通常与配备转速计输出的风扇一起使用,但IC仅使用这些转速计信号来监控风扇速度并确定速度是否低于“看门狗”限制。由于这些转速计信号非常普遍,因此很容易有机会关闭风扇控制的环路。
图2.简单的开环风扇控制由一些健康监测器、超级I/O和MAX1669典型的风扇控制器提供。这种设计可以通过任何DAC和任何接口来实现。健康监测器IC始终具有转速表的输入,但仅作为看门狗功能,以便主机系统可以验证风扇是否以最低速率运行。转速表信号不直接用于风扇控制。由于启动问题,DAC的某些范围丢失,导致系统实际上对7位DAC的风扇速度控制不到8位。
闭环风扇控制放大器
通过使用闭合转速表环路的外部放大器,可以对DAC驱动风扇控制器进行增强。这种方法基本上可以对从8到0的整个255位DAC代码范围进行线性控制。由于转速表已经存在,因此这种修改只需要一些信号调理和合适的放大器布置。在图3所示电路中,对转速计脉冲进行调理,以便去除(区分)所有脉冲宽度信息,仅保留脉冲速率信息。然后,代表频率或风扇速度的脉冲用作积分电机控制放大器的反馈。
图3.该闭环风扇控制放大器与图2所示的IC配合使用。该设计使用转速计信号进行反馈。这提供了对DAC整个输出范围的线性控制。风扇将在任何设置下可靠地启动,而无需先将风扇全速启动。
微分器的时间常数最初设置为在风扇全速下提供的脉冲刚好短于最短转速计脉冲的持续时间。这通常提供的收益太少。可以通过减小R2或C1的值来增加增益。应设置增益,使风扇刚好达到全速,并将全DAC输出施加到放大器电路的输入端。
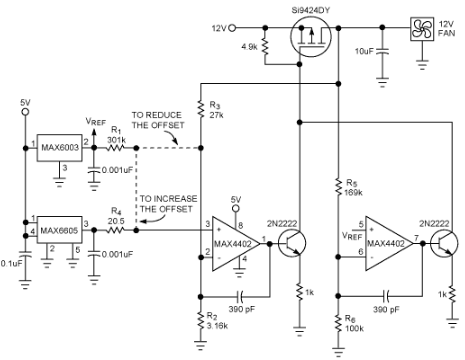
积分器的时间常数设置为对速度变化提供平滑响应,而不会产生任何过冲或搜寻。通常,这是根据实际风扇和系统的经验完成的。图4和图5中的曲线显示了放大器在积分电容C2在0.1μF和1.0μF两个值下的响应。 这些值中的任何一个都符合惯常的稳定性标准,这决定了过冲小于25%。
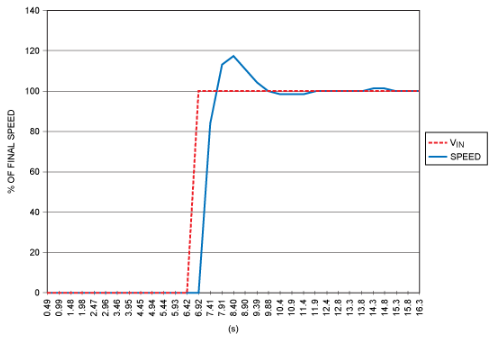
图4.该图描绘了一个具有0.01μF积分电容的闭环风扇控制放大器响应阶跃变化输入。
图5.该图描绘了一个具有1μF积分电容的闭环风扇控制放大器响应阶跃变化输入。
风扇调节集成解决方案
使用专用IC(如MAX6650/MAX6651)大大简化了风扇调速设计。
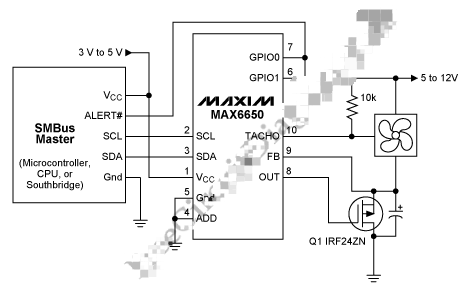
MAX6650设计用于控制单个风扇。MAX6651控制单个风扇,可以监视并充当另外三个风扇转速计输出的看门狗。多个MAX6651可以同步以控制多个风扇。这些风扇速度调节器与 I 接口2C 或 SMBus 并使用来自风扇的转速计反馈来调节其速度。广泛的可编程性可适应各种风扇速度和类型。图6所示为MAX6650的典型连接方式。
图6所示,MAX6650/MAX6651与外部调整管配合使用。由于MAX6650/MAX6651的输出级是模拟DAC和放大器组合,因此反馈从晶体管的漏极获取到标有FB的IC上的端子。这种DAC/放大器组合需要本地反馈。完整环路的反馈实际上是风扇的转速计信号,这也返回到MAX6650/MAX6651。这些器件将驱动风扇,直到转速计信号与MAX6650/MAX6651速度寄存器中的编程周期相匹配。
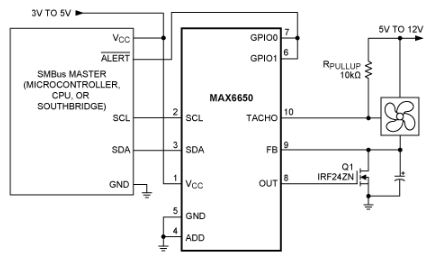
图6.MAX6650为风扇速度调节提供完整的集成、可接口方案。
控制高压风扇
有些风扇的额定电压范围为24V至48V,MAX6650/MAX6651可以很容易地用于控制这些高压风扇。只需将反馈和转速计信号衰减到与实际电源和 12V 之差成正比的量即可。实质上,MAX6650/MAX6651可以被“欺骗”,认为它控制着一个12V风扇。这种修改是通过反馈和转速计输出上的简单衰减网络完成的。
当设置这些衰减器的值时,TACHO引脚上的转速计反馈信号应始终保持比FB引脚上的电压更正。这是在FB网络上以稍大的衰减完成的。FB网络实际上可以容忍很宽范围的衰减,因为这只设置MAX6650/MAX6651输出级的本地增益。该输出级仍然包含在由TACHO信号形成的更大反馈环路中。
图7所示为MAX6650/MAX6651连接至更高电压风扇的电路。R1应足够大,以避免加载上拉电阻,R上拉.R1和R2的衰减因子设置为与12V以上电压增加成正比的衰减因子。例如,在图7中,R1和R2将转速计信号衰减到风扇值的四分之一,因为风扇工作在48V。确定R1和R2的衰减因子后,选择R3和R4具有稍大的衰减因子,以便反馈电压始终比转速计信号更负。在图7中,反馈信号是Q1漏极值的五分之一。转速计和反馈信号之间的关系如图8所示的示波器轨迹所示。这种衰减关系是必要的,因为转速计阈值(以FB引脚为参考)比FB引脚高约1.25V。
图7.该电路使MAX6650能够通过将反馈和转速计信号衰减到类似于48V风扇产生的电平来控制12V风扇。在此设计中,选择具有足够额定电压的 MOSFET。最差情况耗散将为 0.25 × I扇× V扇,其中我扇是风扇的额定电流和V扇是 24V 至 28V 电源。在确定散热要求时,请考虑这一点。
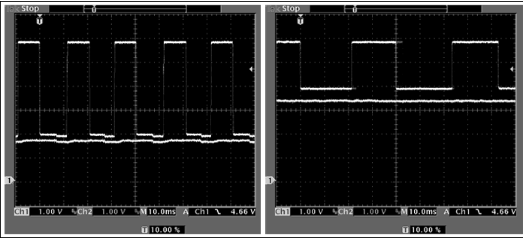
图8.左边的示波器照片是在 780 rpm 下拍摄的,驱动 48V 电机。正确的迹线是在 1526 rpm 下拍摄的。方波是MAX6650转速计引脚上的转速计信号。直线是MAX6650FB引脚的反馈。请注意,在风扇的工作范围内,FB引脚上的电压比TACHO引脚的负电压更大。这是通过将图3中的R4/R7组合设置为比R1/R2组合稍大的衰减来确保的。
隔离风扇驱动
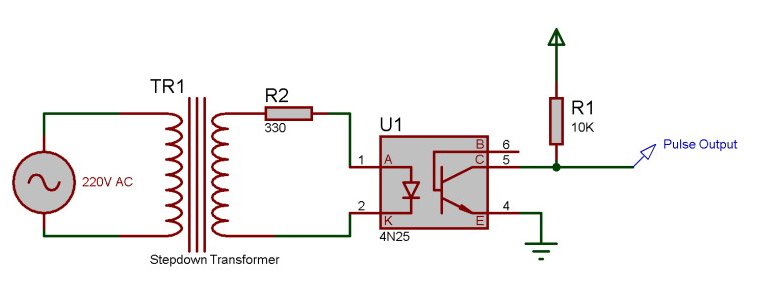
在某些系统中,风扇的高波动接地电流会因接地回路而引起噪声问题。接地环路问题很容易通过电流隔离来解决。图9的原理图可用于隔离任何I2C或SMBus风扇控制器,包括前面提到的MAX1669或MAX6650/MAX6651。该电路利用已经隔离的风扇电源,使得MAX6650/MAX6651不必包括一个单独的昂贵的隔离式5V DC-DC转换器。MAX6330/MAX6331并联稳压器提供了一种经济可靠的48V电压调节方式。MAX23/MAX6330的SOT6331封装与5W压降电阻的尺寸相结合,优于调整稳压器和散热器。此外,5W电阻比散热器更容易安装,安装成本更低。
图9.隔离式风扇控制电路在高风扇电流产生的接地噪声可能成为问题的情况下非常有用。IC1和IC2包括一个用于数据线的双向数字隔离器。由于MAX6650/MAX6651仅作为时钟输入,因此IC3时钟可以使用单向隔离。IC4是耦合的可选补充。
在图9中,双向光隔离器电路隔离数据线。双向隔离器电路在前面的文献中已经描述过。1,2IC1和IC2连接在一起,因此两端的低电平导致另一侧的低电平,而无需隔离器电路锁存。
几乎所有的 I2这里讨论的 C 和 SMBus 器件具有仅输入的时钟引脚(而不是某些 I2C IC,可以通过保持低时钟来“拉伸”时钟)。这种设计只需要一个单向隔离器,从而简化了隔离。这些器件中的大多数还具有看门狗或报警输出,可通过另一个单向隔离器耦合回控制器。
风扇速度调节与风扇速度控制
闭环风扇控制克服了控制直流无刷风扇所涉及的固有非线性。然后,风扇控制变为风扇速度调节。即使在风扇与风扇之间以及由于老化而变化的情况下,也能确保精确的风扇速度。通过可用的风扇控制和健康监测IC,通过在输出端使用闭环放大器电路,可以轻松实现闭环风扇调节。最近,IC提供闭环风扇速度调节。
这些相同的方法很容易适应满足更有限需求的电路。电信等许多应用都使用48V风扇,这些电路和IC可以适应该用途。电流隔离方法可以解决风扇电流尖峰大时偶尔出现的混乱接地环路问题。
审核编辑:郭婷
-
集成电路
+关注
关注
5389文章
11576浏览量
362372 -
转换器
+关注
关注
27文章
8730浏览量
147452 -
dac
+关注
关注
43文章
2299浏览量
191229
发布评论请先 登录
相关推荐
怎么实现使用智能手机控制风扇速度
BLDC 风扇的可变速度控制算法
剖析风扇速度控制器原理
如何使用Arduino生成的PWM来控制交流风扇的速度
使用Arduino和晶闸管(TRIAC)控制交流风扇的速度

风扇控制的进步:考虑风扇速度调节





 工商网监
工商网监
评论