 咖啡机器人如何实现液体流量控制
咖啡机器人如何实现液体流量控制
咖啡机器人是近年来的一种智能化设备,它的出现大大提高了人们对咖啡制备的要求。在制作咖啡的过程中,液体流量控制是非常重要的一项工作。液体流量控制能够保证咖啡的品质和口感,因此在咖啡机器人的设计中液体流量控制是至关重要的。下文将介绍如何利用霍尔流量计实现液体流量控制。
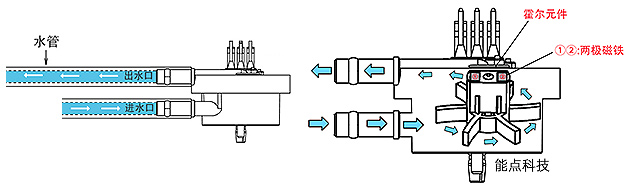
首先,我们需要了解霍尔流量计的原理。霍尔流量计是一种用来测量流体流量的设备,它利用了霍尔效应的原理,通过测量磁场的变化来确定流体流量。其工作原理是通过导电性管道中的磁场感应器将感应到的信号转换成电信号,然后这个电信号通过数字处理器进行处理,最终输出流体流量的实时数据。
然后,我们需要将霍尔流量计与咖啡机器人连接起来。在咖啡机器人中,将霍尔流量计安装在液体管路的某个位置,然后将霍尔流量计与控制模块连接。在控制模块中设置液体流量控制参数,如流量大小,流量变化速度等。当咖啡机器人启动时,液体从储存槽中流过霍尔流量计,霍尔流量计会感应到液体流动的速度,并将数据传输给控制模块。控制模块根据输入的数据和设定的参数,控制电磁阀的开闭,从而实现液体流量控制。
最后,我们需要注重日常维护。为了确保咖啡机器人的正常工作,我们需要定期对霍尔流量计进行清洗和维护,确保其灵敏度和准确性,并及时更换磁场感应器和控制模块中的相关元件,保证咖啡机器人的整体运作。
综上所述,利用霍尔流量计实现液体流量控制在咖啡机器人的设计中有着重要的作用,并可以大大提高咖啡的品质和口感,为人们带来更好的咖啡体验。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28445浏览量
207205 -
流量计
+关注
关注
10文章
1492浏览量
53623
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
中取得了令人瞩目的效果。
阅读感悟
从传统的手动编程到借助大模型实现智能化、自主化,从单一模态的交互到多模态信息的深度融合,再到扩散模型的应用,机器人控制技术正在以惊人的速度进化。这不仅让机器
发表于 12-29 23:04
【「具身智能机器人系统」阅读体验】1.初步理解具身智能
重要。
书中还详细介绍了支持具身智能机器人的核心技术系统,包括自主机器人计算系统、感知系统、定位系统及规划和控制系统。
本书共分5个部分。
第1部分(第1章和第2章)介绍具身智能机器人
发表于 12-28 21:12

如何使用AT指令集实现硬件流量控制?
我尝试使用 AT 指令集实现硬件流量控制。我已将主机控制器连接到 ESP8266 12S。
引脚 13 似乎一切正常,但引脚 15 看起来像是被拉下来并且永远不会改变它的状态,我无法
发表于 07-16 07:23
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
如何使用PLC控制机器人
随着工业自动化技术的飞速发展,机器人技术作为其中的重要组成部分,其应用范围日益广泛。在机器人的控制系统中,PLC(Programmable Logic Controller,可编程逻辑控制
机器人控制系统的基本单元有哪些
引言 机器人是一种具有高度自动化和智能化的设备,它可以模拟人类的行为和思维,完成各种复杂的任务。机器人控制系统是机器人的重要组成部分,它负责接收传感器的信号,处理数据,
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
和增强系统处理图像的实时性,本文提出了一种伊瑟特的六自由度机器人视觉伺服控制系统,将摄像头集成到基于 Zynq的伊瑟特主站上,提高了视觉伺服的实时性.经测试,该平台能够对视觉检测目标的变化做出及时的反应
发表于 05-29 16:17
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
地毯并增加吸力,或是绕过障碍物进行清扫。同时,通过手机APP远程控制、语音指令等方式,用户可以方便地操作扫地机器人,实现个性化的清洁需求。
3.扫地机器人面临的技术壁垒与客户体验问题
发表于 05-05 15:03
NVIDIA助力影智科技xbot咖啡机器人实现自然语义个性化印花咖啡制作
在当今时代,AI 与机器人的结合为各个行业带来了前所未有的变革。inSpace 影智旗下的 xbot 咖啡机器人,便是这一变革的杰出代表。
TP700多路数据记录仪在咖啡机的测试与应用
运用功率采集模块TP1706电参数功率采集模块可以对咖啡机的加热功率的测试,可以测得咖啡机的工作时的电功率变化,它的测量电压5~1000V,电流0~20A,并且交流和直流都可以测试。
自动奶茶机如何实现精准流量控制-光学流量计
在自动奶茶机的应用中,光学流量计是一种实现精准流量控制的重要工具。它利用叶轮切割光通路产生的脉冲信号,通过计算转轮的转动次数来测量水流量的多少。这种测量方式具有以下特点: 不含磁铁:光






 工商网监
工商网监
评论