 雷达模块底噪检测功能作用与使用
雷达模块底噪检测功能作用与使用
雷达模块在日常生活中的使用,难免会受到环境因素的干扰。在不同的使用的场景下,用户需要根据产品所处环境来自定义设置雷达模块的参数。
虽然HLK-LD2410B/2410C的干扰性很强,但是由于使用环境的多样性以及参数调节不当等问题,还是会存在少量的环境干扰,产生误触。如模块直面空调、窗帘、风扇、绿植等,因为如果这些物体的摆动可能引起模块误识别。
为了更好地减少环境干扰和模块误触等问题,HLK-LD2410B/2410C两款模块推出了底噪检测功能。
HLK-LD2410B/2410C模块在调参之前,先对模块的使用环境进行一个初步的环境检测,给出运动感应和微动感应的能量参考值,用户基于这一参考值再去调节运动能量值、静止能量值和感应距离等参数,从而达到最佳检测效果,减少环境干扰的影响。
底噪检测是什么?
底噪检测本质上就是在用户调节灵敏度和感应范围等参数之前,先对使用环境进行一次检测,输出初始的运动能量值、静止能量值,其中包括最大值、最小值和平均值。
底噪检测的作用
如窗帘无意间被风吹动产生的运动,在雷达模块检测到后误识别成有人,就容易造成误触。为了减少这个误触,先在无人环境下进行底噪检测,然后再设置参数。
假设检测在某一场景中底噪检测的运动能量平均值为35,那么将运动能量值设为35,可以在一定程度上屏蔽掉窗帘开关等环境干扰因素,减少误判,提高精准度。
底噪检测的使用
底噪检测是在模块上电之后,通过蓝牙连接到APP(HLKRadar Tool ),在APP上进行调参之前,先开始底噪检测,输出检测到的初始环境值,用户再根据初始环境值来进行调参。
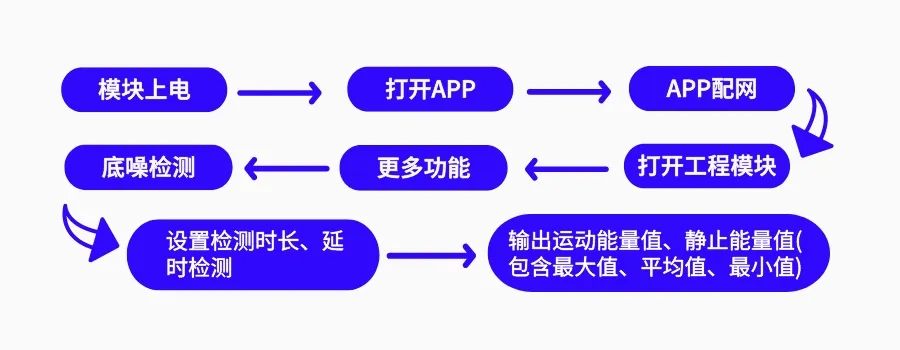
底噪检测中的初始环境值,建议在无人环境下进行,检测范围在0.75-6米,距离和检测范围的参数设置对底噪检测功能无效,模块自动按照默认距离门和检测范围进行底噪检测。
用户可自定义设置检测时长和延时检测,检测时长越长精准度越高,检测完成后,输出环境中运动能量值和静止能量值的最大值、最小值、平均值,用户可根据对应的底噪检测参考值设置参数。
HLK-LD2410B/2410C最远感应距离为可达6米,探测角度可达±60度。模块可分级调参,每距离门0.2m或0.75m可选,最大8个距离门。
同时,模块自带蓝牙功能,支持APP和上位机调参,可设置光敏固件,新增底噪检测功能后,模块在高性能高性价比的基础上,抗干扰能力能力更强,运用于人体感应灯控、广告屏等设备的人体感应唤醒、生命安全防护、智能家居、智能家电等场景中效果更佳。
编辑:黄飞
-
蓝牙
+关注
关注
114文章
5908浏览量
171834 -
雷达
+关注
关注
50文章
2991浏览量
118442
原文标题:LD2410B新增底噪检测功能 提高抗干扰能力和减少误触
文章出处:【微信号:HLK_WULIAN,微信公众号:海凌科智慧物联】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论