 KUAK机器人常用系统变量介绍
KUAK机器人常用系统变量介绍
带有机器人中断数据的结构
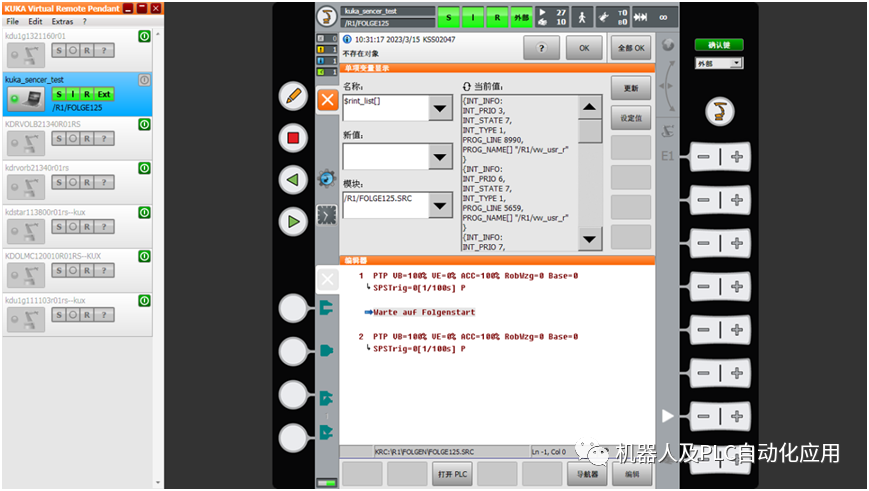
这些数据可以通过变量校正功能或通过主菜单中的诊断功能显示。
在robot和submit程序中,最多可以同时声明32个中断,同时最多可以激活16个中断。
$RINT_LIST[ Index ]={INT_PRIO Priority,INT_STATE State,INT_TYPEType,PROG_LINE Line ,PROG_NAME[] "Name"}
| Index |
类型:INT 中断的索引 1 … 32 |
| INT_PRIO |
类型:INT 中断的优先级 1, 2, 4 … 39 81 … 128 |
| INT_STATE |
中断状态的位阵列 Bit 0=1:宣布并激活中断。 Bit 1=1:中断被激活并启用。 Bit 2=1:全局声明中断。 |
| INT_TYPE |
类型:INT 中断类型 0:标准中断 1:由于紧急停止而中断($EMSTOP) 2:中断快速测量输入的激活($MEAS_PULSE) 3:由于错误停止而中断($STOPMESS) 4:由于触发而中断(子程序调用) |
| PROG_LINE |
类型:INT 宣布中断的机器人程序的行号 |
| PROG_NAME |
类型:CHAR 宣布中断的机器人程序的目录和名称:最多32个字符 |
审核编辑:彭静
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
211文章
28745浏览量
208926 -
数据
+关注
关注
8文章
7193浏览量
89828 -
编程
+关注
关注
88文章
3642浏览量
94103
原文标题:KUAK机器人常用系统变量之$RINT_LIST[]
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
机器人常用材料
机器人常用材料1)碳素结构钢和合金结构钢这类材料强度好,特别是合金结构钢,其强度增大了4~5倍,弹性模量E大,抗变形能力强,是应用最广泛的材料。2)铝、铝合金及其他轻合金材料 这类材料的共同特点是
发表于 09-04 09:21
盘点机器人常用的三种电机
有时观看完一些机器人视频或现场的比赛,都会有自己动手制作机器人的冲动,但一般人都不具有专业知识,导致不知该如何入手。今天,创客集结号介绍一些机器人
发表于 10-25 11:50
机器人、协作机器人和移动机器人,你分的清楚吗
机器人”的额外指导。图1很好地展示了一个机器人系统,其具有一般受保护的工作空间和一个协同操作空间。下面的视频中对此也有介绍。ISO/TS 15066的关键主题之一是“功率和力限制”。在
发表于 10-30 11:33
桁架机器人核心配件介绍
桁架机器人核心配件介绍1.控制器在数控机床机器人控制器方面,目前通用的多轴控制器平台主要分为以嵌入式处理器(DSP,POWERPC)为核心的运动控制卡和以工控机加实时系统为核心的PLC
发表于 11-22 12:08
机器人系统是什么?
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及
发表于 09-10 10:44
DF-1仿人机器人怎么样?
中应用的传感器种类繁多,例如视觉传感器、电子罗盘、加速度计和超声波传感器等都是仿人机器人中常用的传感器。DF-1机器人是我院自主研制的一款仿人机器人。本文首先对DF-1机器人总
发表于 09-18 06:17
拳头机器人视觉线跟踪系统介绍
在物流搬运行业,拳头机器人由于其独特的并联结构,常用于高速整列、装箱等场合。其中,拳头机器人的视觉线跟踪技术正得到广泛的应用,如下图所示:
发表于 08-06 06:30
机器人Python仿真软件介绍
相关知识机器人Python仿真软件介绍软件安装使用Python的第一步现在,我们将尝试使该机器人移动。 有关的RoBIOS命令是int VWSetSpeed(int linSpeed, int
发表于 12-20 07:53
PDF——工业机器人技术及应用
本书系统地介绍了工业机器人的基本组成、机械机构、运动学及动力学、控制系统、编程与调试、典型应用、管理与维护等内容。全书共7章,第1章介绍了工
发表于 10-16 21:21
读取机器人程序中的变量
其中包含引用解释器的进程指针的数据. 变量包含接下来将在解释器中执行的块的数据。 根据特定的解释器,访问数据的方式如下: 读取机器人程序中的变量是指机器人在解释器中的状态。 在提交程序






 工商网监
工商网监
评论