 雷达三大应用原理
雷达三大应用原理
如【一个小知识】雷达—科技圈的低调王者,你真的懂?(上)所述,雷达神通广大,无处不在地改变着我们的生活体验,但万变不离其宗。雷达令人眼花缭乱的应用场景,不外乎都基于它的三大应用原理:测距、测角和测速。
那么,雷达的测距、测角和测速又是怎么回事?看完此文保证你秒懂!
雷达测距
根据雷达原理,被测目标会把接收到的电磁波反射回雷达,不过反射回来的电磁波肯定和发射出去时的电磁波变得有点不一样了。就好比我们小时候如果干干净净的出门,但裹着满身泥巴回家,父母就会判断我们在地上打滚了,如果回家时间太晚,那就很可能是跑到更远的隔壁村了。同样的,通过对比原始的雷达发射脉冲和回波脉冲之间的延迟时间(小孩出门时间),就可以用来估算目标与雷达站点之间的距离。
举个栗子,电磁波在空气中传播的速度大约是光速 c,即3*10^8m/s,小学学习乘法时,就已经有类似的应用题,距离=速度*时间。只是说,雷达脉冲所走的路程,是雷达站和目标之间的一个来回,因此距离的计算公式,就变成了 。怎么样,连小学生都听得懂吧?
。怎么样,连小学生都听得懂吧?
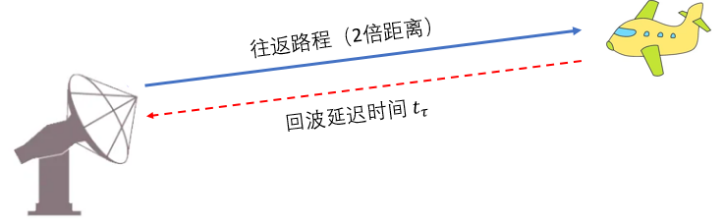
图1雷达测距原理
雷达测角
哪怕是千年古树,树冠虽大,但树干永远是最初的基础与成长的源头。不管通过雷达测距,虽然能够得到目标和雷达站之间的距离,但是如果不通过测角来确定出具体方位,目标就仿佛是修炼了鬼影神功的东瀛忍者,能以该距离为半径,360°全方位变换出无数个影分身迷惑住雷达站。对待这种难缠的敌人,就是时刻去琢磨他!分析他!研究他!最终找到突破点,从而一战胜之。
事实上,不论是雷达回波,还是什么奇奇怪怪的电磁波,无非都是从三个方向去剖析它,分别是幅度、频率和相位。而雷达测角功能,就可以通过相位,或者幅度的信息量来获得。未来雷达如何发展,掌握其原理,才握住了其命脉。
振幅法测角
振幅法主打的就是简单粗暴。雷达站将会在一定的扇形范围内,或者直接360°范围内重拳出击。只有当雷达波束打到真正的目标上,才会有回波返回到雷达站,雷达站只要找到回波脉冲串的最大值,就能确定这一个时刻波束的指向,就是目标的所在方向!
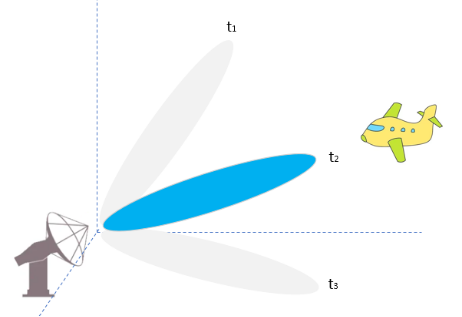
图2振幅法测角原理
相位法测角
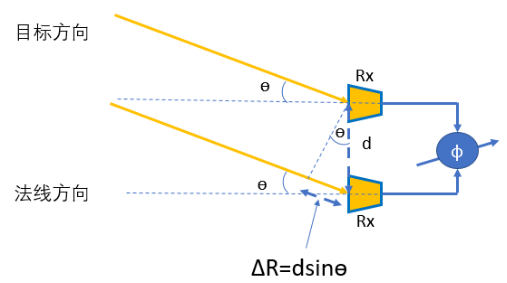
图3 相位法测角原理
举个栗子,两个天线间距离已知为 d,因此它们所收到的回波由于存在波程差∆R,肯定会有一相位差 ɸ。高中物理时学过,相位=频率*时间,因此

也就是说,只要通过一个相位计,测出两个接收天线间的相位差,目标方向的角度 ɵ就呼之欲出了!
相比起来,振幅法的原理似乎比相位法简单多了,但是振幅法自身还是有不少局限性,比如雷达发送两个相邻脉冲时,肯定是有一定转角的,这样就会存在一定的“量化测角误差”,更严重的是,如果转角过大,目标偏离波束轴线太远,有可能直接就漏掉目标了。
雷达测速
得到目标距离和方位的“小雷达们”不禁沾沾自喜,“目标位置已锁定,随时准备全军出 击!” 殊不知,万事万物都是在时刻变化的。等到大军到达之前锁定好的战场,可能早就已经是“昔人已乘黄鹤去,此地空余黄鹤楼”了。因此时刻把握敌军的运动情况(测速),并推演出下一时刻目标出现的位置,才是制胜的宝典。
多普勒效应
虽然连续波雷达实际中并不常用,但还是可以从最简单的连续波雷达来引入这个话题。假如连续波雷达信号的的角频率为W0,当目标和雷达之间存在相对运动时,两者间的距离 R 就会随时间变化,即R(t)=R0-vt。其中,R0 为 t=0 时刻的距离,v 为目标相对雷达的径向运动速度。因此,雷达回波的时延 ,那么回波信号相比起发射信号来说,相位差为
,那么回波信号相比起发射信号来说,相位差为 ,如果把该相位差再对时间求导,就得到了一个频率差
,如果把该相位差再对时间求导,就得到了一个频率差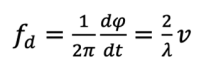 ,也就是说,目标和雷达之间的相对运动速度,和发射波与回波间频率差,存在着正比关系。如果雷达站和目标之间有相向运动时,接收者在单位时间内收到的振荡数目要比它们不动的时候更多一些,等效为就是频率增加了;二者间做背向运动时,频率就会减少。其实这就是我们平时所熟知的多普勒效应。
,也就是说,目标和雷达之间的相对运动速度,和发射波与回波间频率差,存在着正比关系。如果雷达站和目标之间有相向运动时,接收者在单位时间内收到的振荡数目要比它们不动的时候更多一些,等效为就是频率增加了;二者间做背向运动时,频率就会减少。其实这就是我们平时所熟知的多普勒效应。
典型雷达测速场景
在实际应用中,脉冲雷达才是雷达工作的主要方式,而脉冲对应的频谱是在频谱上无线宽的一个 sinc 函数。
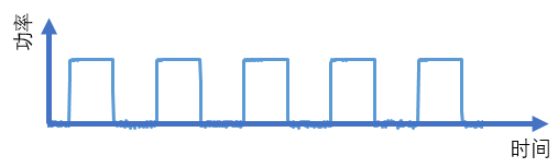
图4 脉冲信号时域图
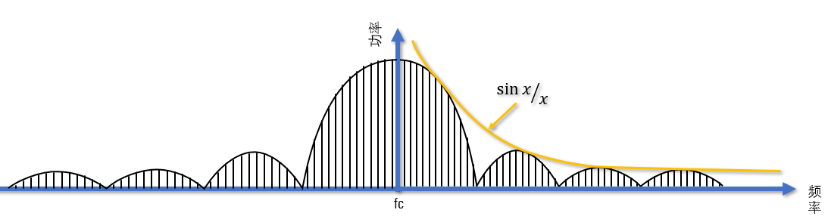
图5 脉冲信号频域图
要像单一频率的连续波那样,直接测量 sinc 函数的频偏,似乎就不那么容易了。但是条条大路都能通罗马,眼前的障碍,最靠谱的方式,往往是选择绕过去!
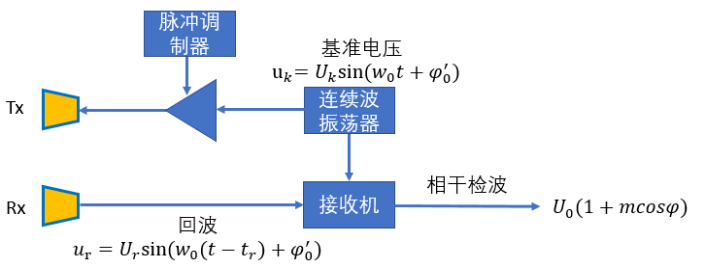
图6 脉冲雷达测速原理框图
接收机会将连续波信号 uk 和回波信号 ur 做一个简单的加法运算,然后再求出这个和信号相干检波后的包络 。
。
相干检波
这里需要额外提一句相干检波,它是会根据载波的相位信息去检测并接收信号。比如两个同幅同相的正弦波,它们相加后,幅值会叠加为原来的两倍; 但如果是同幅反相的正弦波,相加后,幅值不仅不会增加,反而会消减为 0。
因此图6中最终合成的信号的幅度,还得取决于回波和发射波之间的相位差值 。其中,U0 是连续振荡的基准电压经过检波后的输出,它是一直存在的,而
。其中,U0 是连续振荡的基准电压经过检波后的输出,它是一直存在的,而 则表示回波和基准电压做相干检波后,叠加上去的信号分量,并且它只存于回波信号到来的期间。
则表示回波和基准电压做相干检波后,叠加上去的信号分量,并且它只存于回波信号到来的期间。
假如是一个固定不动的目标,收到的回波和发射波之间的相位差必然是一个常数。因此,检波后,隔去直流分量,就可以得到一串等幅的脉冲输出。但是,对于运动的目标而言,回波相对于发射波的相位差会随时间改变。
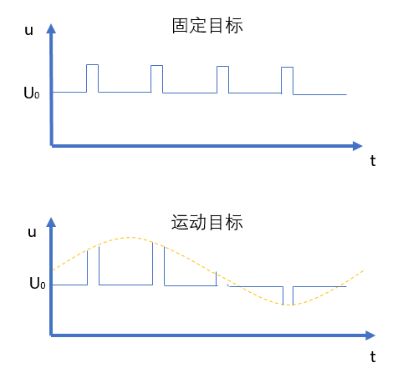
图7 相干检波时域波形图

因此,隔去直流后的脉冲信号包络为

其中,多普勒频移 ,即
,即 。
。
呀!这不就和连续波雷达求得的多普勒频率公式一样了嘛,多普勒频率和目标的径向运动速度成正比关系!只是说脉冲雷达的多普勒频率刚好就是回波脉冲的包络调制频率,这相当于是连续波雷达工作的一个取样状态。
看到这里,必须为你撒花!鼓掌!点赞!虽然这一章节有一丢丢的烧脑,但是我相信,雷达测距、测角和测速的原理你已经了然于胸了!
-
雷达
+关注
关注
50文章
2930浏览量
117465 -
电磁波
+关注
关注
21文章
1454浏览量
53815
原文标题:【一个小知识】雷达测距、测角和测速是怎么回事?看完秒懂!
文章出处:【微信号:罗德与施瓦茨中国,微信公众号:罗德与施瓦茨中国】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
UART串口通信问题,求解答,谢谢大家了
毫米波雷达VS激光雷达VS超声波雷达
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观
5.8G雷达存在感应模块,微波雷达智能感应灯应用,多普勒雷达技术
汽车雷达不响的原因
基于AWR1642的短程雷达解决方案
激光雷达类型:TOF雷达与三角测距雷达
全球自动驾驶传感器的市场格局
一文读懂自动驾驶的环境感知技术

安信可Ai-Thinker Rd-01 24G人体存在感应模组,帮助客户低成本实现智能化!
雷达三大应用原理:测距、测角和测速

传感器科普:毫米波雷达(三)





 工商网监
工商网监
评论