 使用AI爱克斯开发板与LabVIEW实现麦克纳母轮小车的控制
使用AI爱克斯开发板与LabVIEW实现麦克纳母轮小车的控制
01
/简介/
本项目旨在探索和实现利用AI 爱克斯开发板和LabVIEW软件平台对麦克纳母轮小车的精确控制。麦克纳母轮小车以其灵活的移动能力和广泛的应用前景在机器人领域受到广泛关注,目前作为创新动手平台,已广泛应用于各大中小学以及高校的 STEAM 教育中。
基于英特尔N5105处理器的 AI 爱克斯开发板是一款功能强大的小型计算机,专为支持入门级边缘人工智能应用程序和设备而设计。无论是在人工智能学习、开发还是实训等应用场景下,它都能完美胜任。

NI LabVIEW 则是一款图形化编程环境,以其直观的编程方式和丰富的数据处理能力深受工程师们的喜爱。
在本项目中,我们将 AI 爱克斯开发板和 LabVIEW 结合,通过设计和实现适合麦克纳母轮小车的控制算法,实现对麦克纳母轮小车的实时控制。
本文范例代码:
git clone
https://github.com/aiblockly/aixbroad_code_example.git
02
/Mbot mega 麦克纳母轮小车/
mBot Mega 是一款先进的二合一机器人套件。全金属外壳,科技感十足,自主拼装,享受动手乐趣与成就感。4个直流电机搭配全向移动麦克纳姆轮,可进行机器人移动算法学习,实现万向移动等更灵活更高级的机器人运动控制,尽享超感遥控体验。配备18650充电锂电池,2600mAh容量,为澎湃动力提供强劲电量。搭载多种智能传感器,可实现手势识别。支持图形化编程、Python、Arduino C 语言编程。


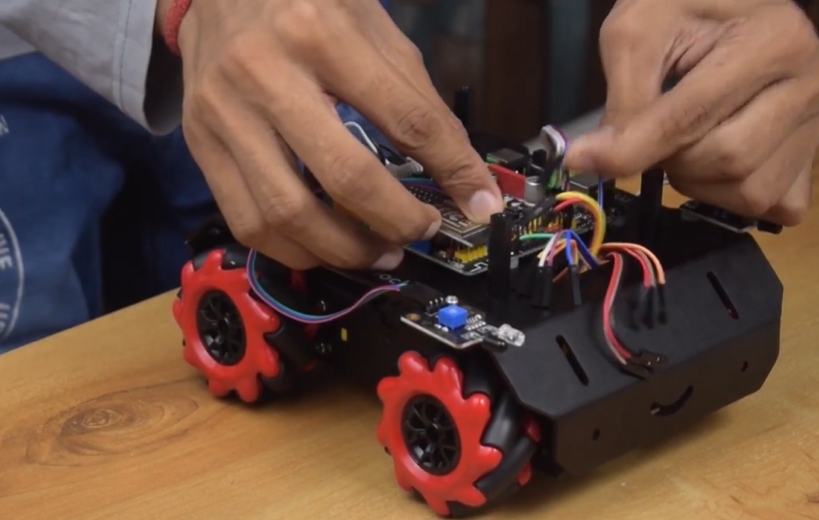
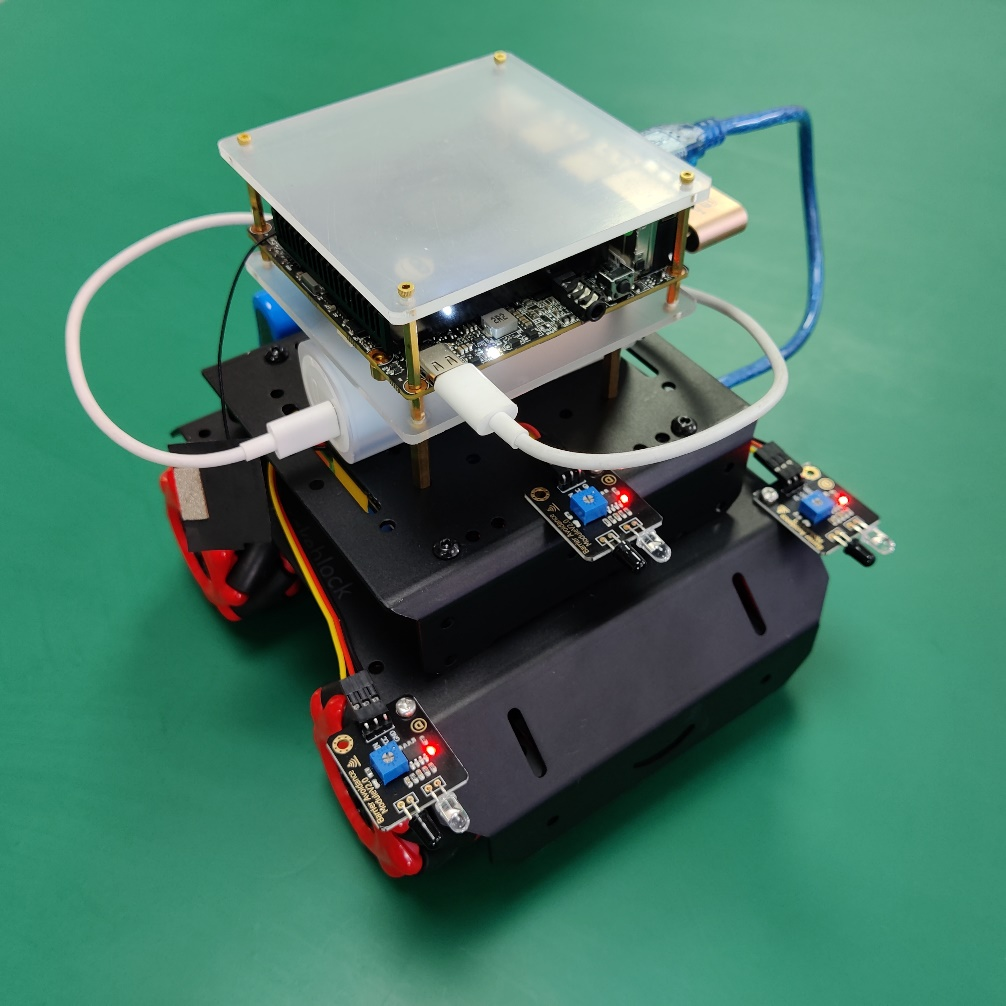
组装麦轮小车
请按照说明文档对麦克纳母轮小车进行组装,首先是小车本体的组装,随后需要将 AI 爱克斯开发板安装在小车上,具体可以参考图或相关文档。
03
/开发 LabVIEW 程序/
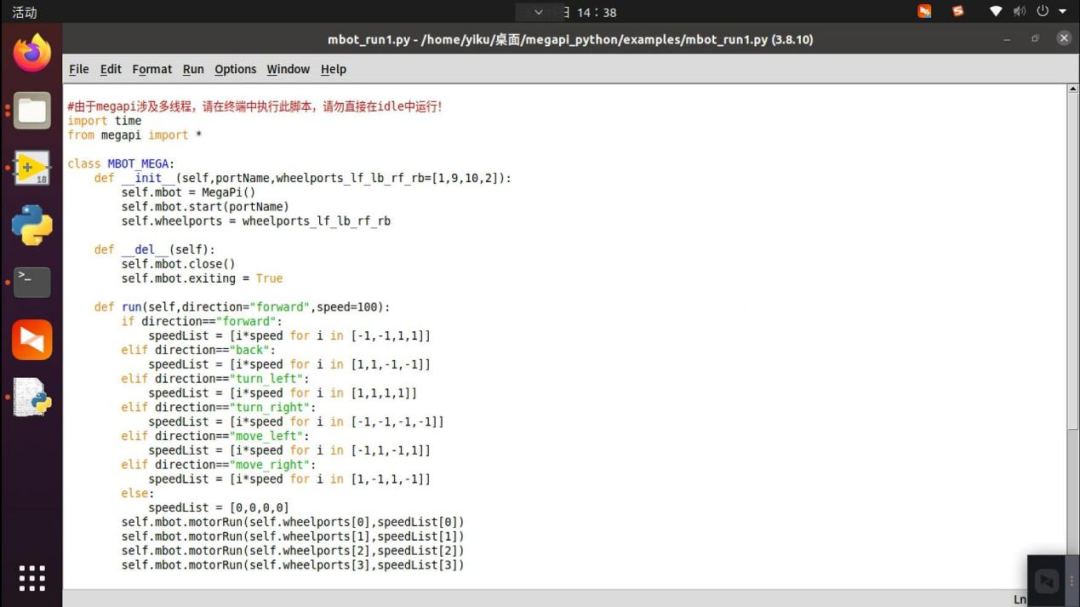
我们可以使用 Python 代码来实现对麦克纳母轮小车的控制(如下图):
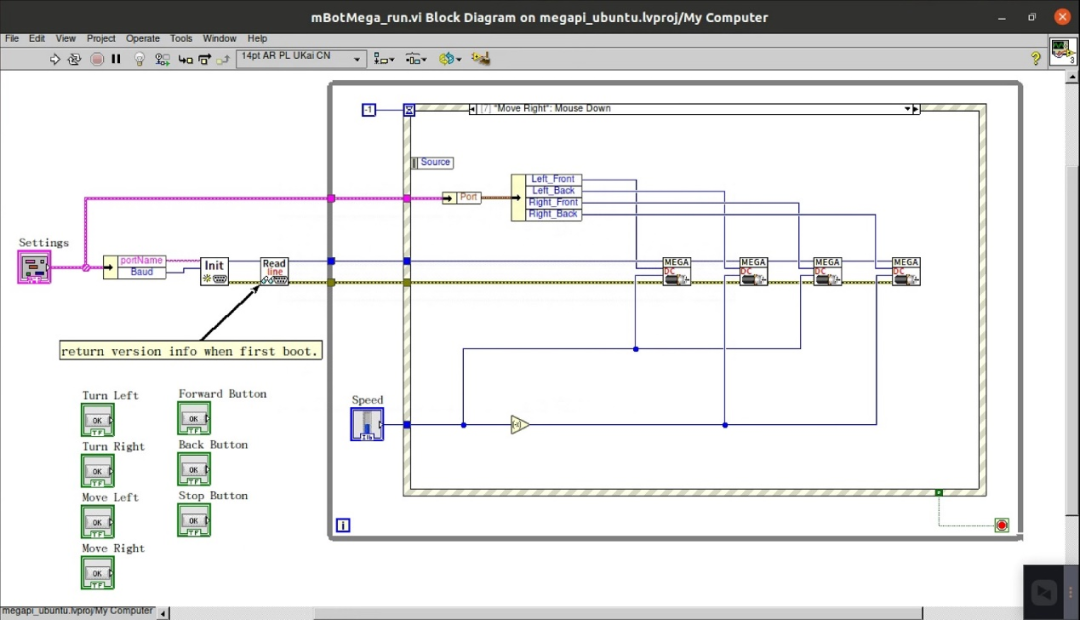
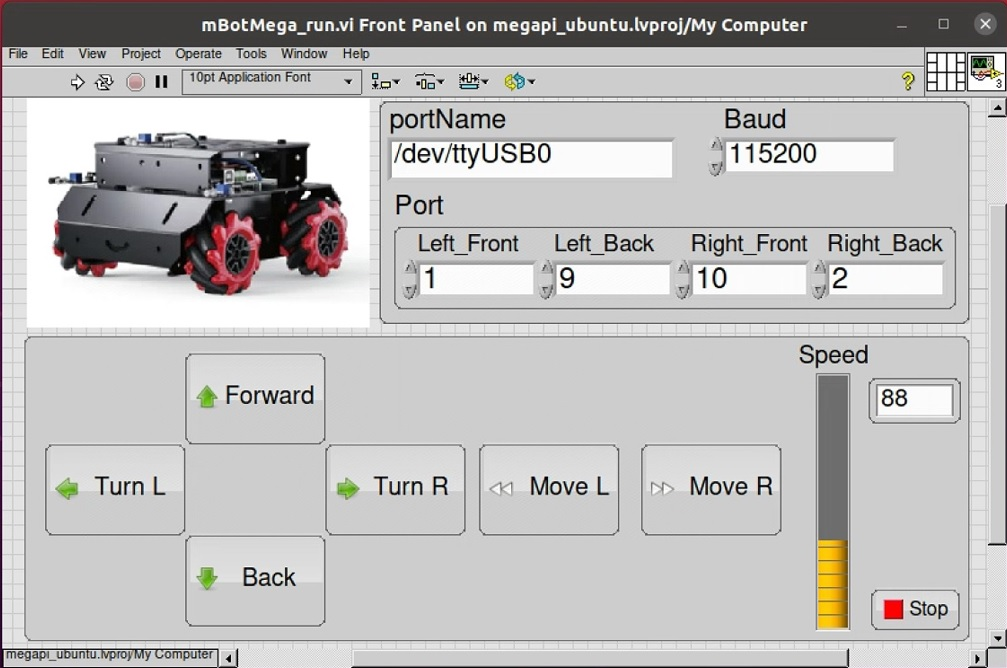
不过相比而言,使用 NI LabVIEW 图形化编程平台让开发更为简明,如下图程序所示,简单的一个事件循环就实现了对麦克纳母轮小车的基本运行控制(界面);
04
/结论/
通过本项目的实践探索,我们验证了 AI 爱克斯开发板与 LabVIEW 联合实现对麦克纳母轮小车的精确控制的可能性和有效性。LabVIEW 的图形化编程环境不仅使得控制逻辑的设计和实现更为直观,而且其丰富的数据处理能力也为我们提供了强大的后盾。同时, AI 爱克斯开发板控制板以其高性能处理器和丰富的接口,有效地执行了我们设计的控制算法,实现了对麦克纳母轮小车的控制。
值得指出的是,这样的软硬件结合模式不仅限于实现麦克纳母轮小车的基本运动控制,其开放的设计和强大的处理能力为我们提供了在此基础上实现更多人工智能算法的可能性。例如,我们可以在此系统上实现自主导航、避障、物体追踪等高级功能,从而将麦克纳母轮小车开发成一个功能强大的移动机器人平台。
更为重要的是,这种结合AI 爱克斯开发板和 LabVIEW 的控制方式也为 STEAM 教育提供了一种新的可能。通过编程控制麦克纳母轮小车,学生们可以更好地理解和学习科学、技术、工程、艺术和数学相关的知识,同时也能激发他们的创新思维和动手能力。我们期待看到,麦克纳母轮小车在此控制系统的驱动下,能够成为 STEAM 教育的一种新的、有趣的教学工具,激发更多学生对科技创新的兴趣。
审核编辑 :李倩
-
机器人
+关注
关注
211文章
28418浏览量
207083 -
人工智能
+关注
关注
1791文章
47274浏览量
238467 -
应用程序
+关注
关注
37文章
3268浏览量
57704
原文标题:使用AI爱克斯开发板与LabVIEW实现麦克纳母轮小车的控制 | 开发者实战
文章出处:【微信号:英特尔物联网,微信公众号:英特尔物联网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【米尔RK3576开发板评测】带你初步了解米尔RK3576这块开发板
搭载勘智K230的AI视觉开发板介绍


基于哪吒开发板部署YOLOv8模型







 工商网监
工商网监
评论