 4D成像雷达专栏 | 4D高分辨毫米波雷达概述
4D成像雷达专栏 | 4D高分辨毫米波雷达概述
本文首发于公众号【调皮连续波】,其他平台为自动同步,内容若不全或乱码,请前往公众号阅读。保持关注调皮哥,和1.6W雷达er一起学习雷达技术!
【正文】
编辑|雷达小助理 审核|调皮哥
1、概述
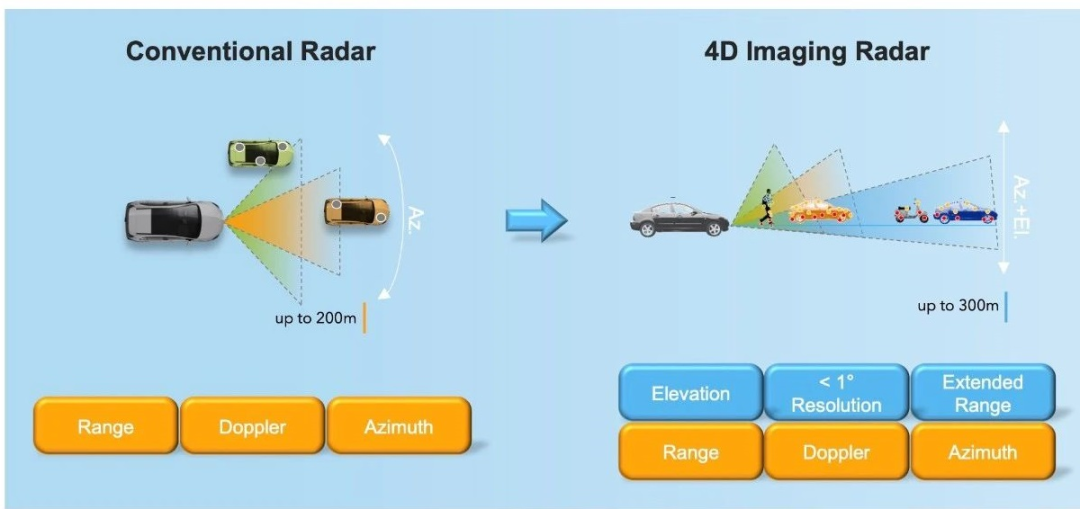
4D高分辨毫米波雷达(4D High Resolution Radar),也叫做4D成像毫米波雷达,简称4D成像雷达。不论是传统毫米波雷达(mmWave Radar),还是4D成像雷达,或者是其他汽车上使用的雷达,都可以统称为汽车雷达。
4D指的是距离(Range)、速度(Velocity)、水平角度(Azimuth)和俯仰角度或高度(Elevation)四个维度的信息,但极少数雷达厂商为了吸引投资者眼球,在4D的基础上增加上雷达散射截面积(Radar Cross Section,RCS)、微多普勒(Micro-Doppler)或者其他维度信息,自称5D成像雷达。不过业内一般仅提4D成像雷达,把RCS、微多普勒等信息当作目标的特殊属性提取特征,并采用机器学习模型实现目标分类(Classification)。上述的每一个维度的信息获取,都是4D成像雷达的一个子课题或者关键技术,后续会慢慢提及这些关键技术。
虽然,在未来4D成像雷达将承担自动驾驶关键传感器的角色,如360°环视感知、行泊一体、全自动驾驶等,但目前(2023年5月)4D成像雷达还没有大规模使用,用于车载的雷达仍旧以低成本的传统前向雷达为主。
现代雷达是一个庞大且复杂的系统,涉及天线、射频、信号处理、数据处理等“软硬算测”等多方面的内容,而毫米波雷达麻雀虽小但五脏俱全,其复杂程度没有半点降低,且面对的场景更加复杂。对天的军事雷达工作环境背景比较干净,但其模式比较复杂(如搜索、跟踪、监视、导引)。
目前,车载4D成像雷达工作模式可以说比较单一,即使目前的车载前向雷达可以具备多模功能,可同时探测“远中近”的目标。但在城市道路十分复杂的环境背景,存在多径干扰和目标形态各异等原因,要做好一款4D成像雷达并不简单。可以说很多事情都是摸着石头过河,并不是光砸钱就能解决的,而未来汽车雷达也可能具备复杂的工作模式。
本文主要介绍4D成像雷达的一些实现技术和可以拓展的功能,毫米波雷达未来的发展趋势是:小体积、低功耗、高实时性(低算力)、低成本、多模式、高分辨、智能化、全方位感知。更进一步说,目前在硬件趋于同质化的情况下,如果没有新的技术从底层硬件材料或者信号处理算法上得到突破,那么未来的雷达将在智能化方面联合人工智能(AI)算法,增强雷达的数据处理以及目标识别与分类的能力。但前提是,底层信号处理链路提供的点云能够保质保量,正所谓:兵不在多,而在精。
2、高分辨点云
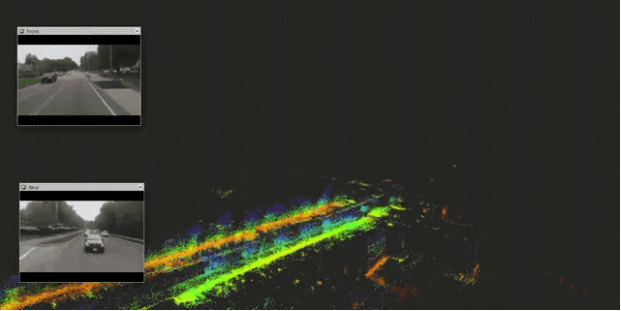
与传统毫米波雷达相比,4D成像雷达的优势就是高分辨,即让目标在距离维度和角度维上的分辨率更高,得到的散点簇(Cluster)数量是传统毫米波雷达的数十倍,根据目前雷达企业的产品指标一般每秒(15~20帧)数万个点。如此密集的散点簇组合后被称为点云(Point cloud),点云能够在一定程度上体现目标的轮廓,达到“成像”的效果,这就是4D成像雷达4D Imaging Radar)的由来,但和激光雷达(Lidar)、合成孔径雷达(SAR)相比还远远不够。
前面提到,一味追求点云数量并非明智之选,还需要保证点云的质量。点云数量多实时性难以保证,冗余的点云信息其实没有用。也就是说需要在保证点云质量的基础上,提高点云的数量,即使数量少一些也要保证质量。
4D成像雷达最具优势的特点就是提供高质量的点云,高质量的点云却极大地扩展了毫米波的应用范围,传统毫米波雷达只能在ADAS(L2和L3级别的自动驾驶)中使用。而4D成像雷达的推出,为毫米波雷达家族(前向、后向、侧向、角雷达、舱内活体检测、360环视感知)进入高级无人驾驶提供入场券,可与摄像头、激光雷达、超声波雷达同分一杯羹了。
3、4D成像雷达功能
4D成像雷达下述的功能,使其更进一步获得与激光雷达和相机相提并论的资格。
(1)360环视场景感知
(2)自动泊车(APS)或行泊一体化
(3)可行驶区域检测(Freespace)
(4)目标分类(Classification)
(5)目标局部定位(Locallization)
(6)SLAM(landmark based SLAM)
目前国内的大部分雷达厂商都还不具备量产资格,即使从2018年开始研发4D成像雷达,如今(2023年)5年的时间过去了,也只有几家企业官宣量产上车。
国外雷达企业如大陆、博世、安波福、海拉、奥托立夫等玩法诸多,有多芯片级联方案、有特殊的天线结构、布阵形式等。METAWAVE的核心技术是利用超材料构建波束扫描收发阵列,采用基于Pencil Beam的窄波束扫描整个FoV,并在算法层面引入AI Engine,实现了一款高分辨智能雷达。另外,Cognitive、Arbe、Oculii、Uhnder、Vayyar、Lunewave、Echodyne、瑞萨等公司都在相继研发4D成像雷达。
4、4D成像雷达实现方案
总的来说,目前主要有以下四种方案,未来可能还会出现新的方案。
(1)软件虚拟孔径雷达方案
本方案强调“软件定义的雷达”,主要厂家有傲酷(Oculii)、Mobileye、Zadar等。软件虚拟孔径雷达(VAR),其核心在于通过软件模拟,增大毫米波雷达的孔径以提升角分辨率。角分辨率即为雷达的指向精度。比如雷达指向精度0.01rad(换算成角度就是0.6°),则自动驾驶车辆可以在100米的距离获得1米的分辨率。在雷达中,角分辨率的高低与波长与孔径大小有关(3dB波束宽度或半功率波束宽度),即波长越长,角分辨率越低,孔径越大,分辨率越高。
传统毫米波雷达大多为24GHz,波长较长且孔径小,其特性注定角度分辨率低。倘若扩展天线的尺寸或者增加天线的数量,可以提高雷达性能,但也会显著增加成本、尺寸和功耗。而
4D成像雷达可通过虚拟孔径成像软件算法和天线设计模拟数倍、甚至数十倍天线以提升角分辨率。4D成像雷达公司傲酷(美国)推出的商用4D成像雷达EAGLE,其搭载虚拟孔径成像软件可动态发送相位调制的自适应波形。该波形可跟随环境实时变化,并随时间编码数据,从而可雷达硬件的角分辨率最高提升达100倍。最终实现水平120°和纵向30°的宽视场中提供0.5°水平x1°纵向的角分辨率。傲酷的点云数量看似很多,但其牺牲了置信度换取更高的分辨率,实则点云的质量并不高,且国内反响并不明显。
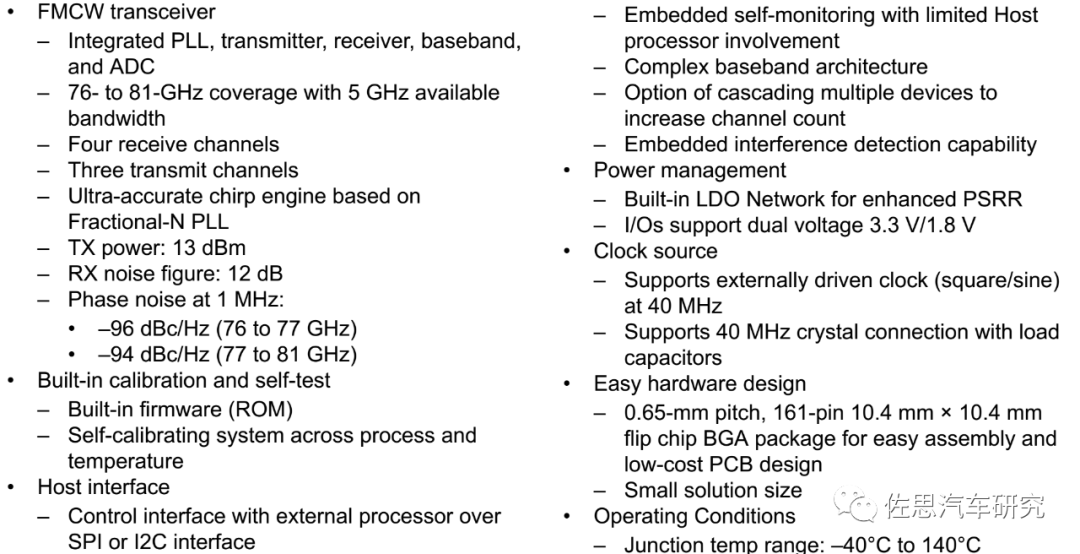
(2)专用成像雷达芯片方案
本方案主要是如Arbe、Vayyar等。成像雷达芯片是整个系统的核心,包括多种功能电路,如低噪声放大器(LNA)、功率放大器(PA)、混频器、压控振荡器(VCO)、锁相环频率综合器(PLL)、本振链路(LO)、移相器(Phase shifter)、倍频器(Frequency multiplier)、分频器(Divider)、可编程增益放大器(PGA)、滤波器(Filter)、甚至收发天线等,需要具备射频损耗小、噪声低、频带宽、动态范围大、输出功率大、功率附加效率高、抗电磁辐射能力强、收发隔离度高等特点。
目前量产的76GHz~81GHz毫米波雷达芯片技术大都采用SiGe制程,接收通道、发射通道和本振(LO)通道分开实现。目前正在向成本更低、集成度更高的硅基CMOS技术演进,从65nm、40nm逐步向28nm、16nm工艺演进,同时集成度进一步提高,实现射频前端、ADC、MCU和存储器单片全集成,达到成本低、封装小、重量轻、功耗低的设计要求。
毫米波雷达根据点云密度由低至高可分为24GHz、77GHz、79GHz三种,以前24GHz为市场主流,目前77GHz及79GHz初入量产阶段,逐渐替代24GHz。点云密度低意味着自动驾驶车辆在行驶中无法对周围行人、车辆、桩桶点云成像,使得仅搭载毫米波雷达的车辆无法在复杂路段行驶。而目前4D成像雷达普遍为77GHz及以上频段,车辆可在行驶中达到类似激光点云的成像方式。
但存在问题是,Arbe的超高通道方案目前行业整体反馈并不好,Vayyar则被TI拆解后发现造假。
(3)多芯片级联方案
本方案主要目的是以增加天线数量,提高角度分辨率,比如大陆、博世、采埃孚(ZF)、森思泰克、楚航科技、行易道等一众公司。
毫米波雷达天线的主流方案是微带阵列,利用较小的高频印刷电路板(PCB)空间产生足够的天线辐射强度,并实现与芯片的互连。基于多芯片级联的79GHz MIMO毫米波成像雷达是未来产业化方向,采用多芯片级联和微型化PCB板载天线阵列,加上雷达信号处理,可以实现面向高精度多维成像的79GHz MIMO虚拟阵列雷达,将识别精度进一步提升到微米级别,支持距离、速度、角度、高度测量和多视角可调多工作模式,实现全天候下的多维毫米波成像。
芯片级联可分为双级联、四级联、六级联和八级联4种方式,通过3发4收的芯片联为一体组成6发8收、12发16收、18发24收、24发32收芯片。然而,此种传统提高角分辨率的方式,只是简单堆砌更多芯片、更多天线。例如提高角分辨率到1度角,必须通过多个芯片级联、增加天线孔径,但缺点是雷达硬件受成本、尺寸、功耗的限制较大,部分四级联成像雷达功耗都达到25W。
(4)超材料方案
采用超材料研发新型雷达架构,代表厂家有Metawave等。通过在超材料表面上嵌入显微结构,该结构可结合电磁波传播技术,以此创建出比传统电路要小很多的电路。此类技术为代表的公司是Metawave,其SPEKTRA雷达通过模拟波束并不断转向波束,可对350米以上的车辆和200米以上的行人进行检测和分类。
Metawave采用的方法是把电磁波束紧紧地聚拢起来,让其能量集中在一处,要实现这样的效果,在数字空间(Digital Space)是办不到的,只有在模拟空间(AnalogSpace)里才能做到。实际上,WARLORD可以说是一款模拟波束雷达产品(Analog Beam Forming Radar)。WARLORD的技术特性如下所示:
(1)Metawave采用的是单天线,而非天线阵列,同时接收也是单线的。这种天线由复合超材料结构而成,每一个超材料单元(Unit Cell)都有活跃组件能够参与波束成形,还能调整波束角度,这相较于如今大部分雷达用的多天线结构有很大的优势。
(2)Metawave采用了英飞凌、NXP和TI等Tier2的芯片将天线和芯片组进行了整合。
(3)采用优越的微控制技术,比如要控制天线探测前方的物体,追踪其距离、角度、速度以及运动的方式,同时还要判断这些物体的类别,最后还要把这些经过处理的信息传送给(自动驾驶汽车)的传感器融合单元。
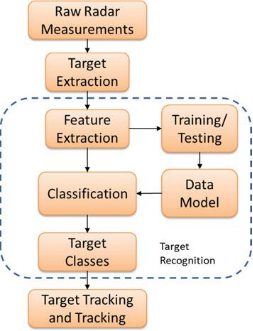
5、4D成像雷达算法
雷达算法分为信号处理和数据处理两个部分,信号处理偏底层,是雷达算法的关键基础技术,雷达信号处理(Radar Signal Processing,RSP),主要要包含如下几个方面:
(1)阵列天线设计
阵列天线布局设计与优化,涉及到均匀线阵(ULA)、非均匀线阵(NLA)、最小冗余阵(MRA)、嵌套阵(NA)、互质阵(CPA),4D成像雷达的方位角分辨率和俯仰角度分辨率需要达到1°以内。
通常布阵后续的MIMO信号处理和超分辨DOA估计是联合在一起的,需要系统考虑。
(2)MIMO信号处理
MIMO信号处理主要是通道分离,主要涉及到波形设计技术,如TDMA、BPMA、DDMA、CDMA、TDMA+DDMA-MIMO等波形,另外还有采用PMCW波形。
(3) 目标检测与参数估计
雷达链路预算、CFAR、测距、测速、测角,比如FFT+插值细化。
(4) 超分辨DOA估计
FFT、DBF、Capon等算法分辨率不够,无法提供角度高分辨,因此需要采用超分辨算法,比如ROMP、IAA、DML、CS、神经网络DOA估计等。DOA算法大概有20多种,传统的毫米波雷达采用的算法还是ULA+FFT,但对于4D成像雷达还不够,一般为了满足实时性要求,在工程上大多数方案喜欢ULA(稀疏阵)+FFT粗搜+超分辨细搜方案。
(5)通道校准(Calibration)
天线通道校准是必须的,校准方面如通道幅相误差、频率误差、阵列互耦误差、阵元位置误差、方向图一致性误差、有限采样误差(Finite Samping Error)、安装误差(Mount Error)等。
(6)点云聚类算法
聚类算法并不是必须的,有时候无须聚类也行。常用的聚类算法是DBSCAN,但对于实际场景中如何区分汽车和汽车旁边的行人,并不会引起同簇分裂和异簇合并,却没有那么简单。一些新的聚类算法被提出用于提高算法执行效率或者改善聚类效果,比如多帧联合聚类(ICP)、分阶段二次聚类,或者基于Kd-tree的加速聚类算法。
(7)目标跟踪算法
目标跟踪算法主要涉及航迹起始、跟踪滤波和数据关联三大核心技术。航迹起始有逻辑法(滑窗法)、直观法、Hough变换法。跟踪滤波采用卡尔曼滤波,卡尔曼滤波有很多种,如KF、EKF、UKF、CKF。关联算法有单目标采用NN、PDA,多目标采用JPDA、匈牙利匹配。
(8)目标分类与识别算法
目标识别技术可以对被检测物体进行区分和分类,识别完成之后,就有可以针对特定类型的目标优化信号处理算法,例如,针对客车和行人可以采用不同的跟踪和滤波算法,这样可以提高雷达的检测效果,这种就有点类似于自适应动态调整。
常见的机器学习算法有KNN、SVM、随机森林、决策树等等。
(9)多传感器融合
雷雷融合、雷视融合等。
(10)可行驶区域检测
可行驶区域检测可以帮助自动驾驶汽车规划行驶路线。
上述技术的具体实现方法,本文不做详细论文,留待后续的文章中详细解析。
6、4D成像雷达效果展示
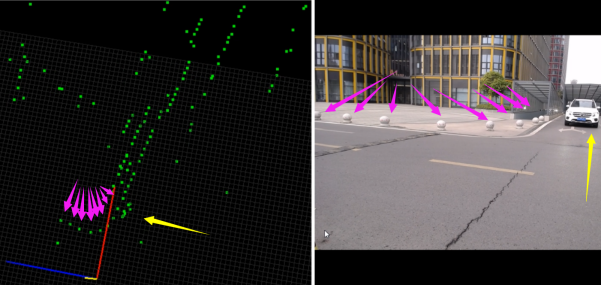
(1)ARS548
点云数量并不多,但质量是真的高。
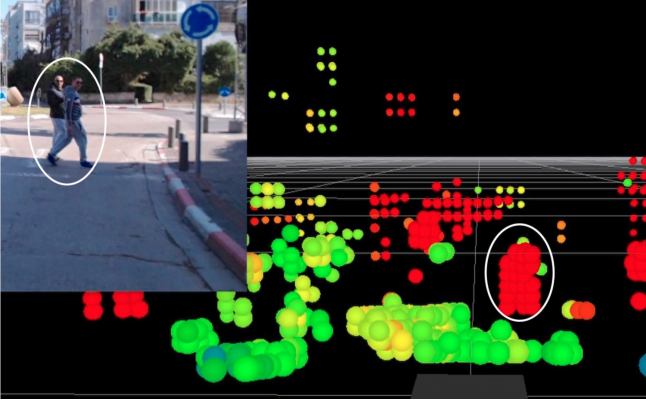
(2)Arbe

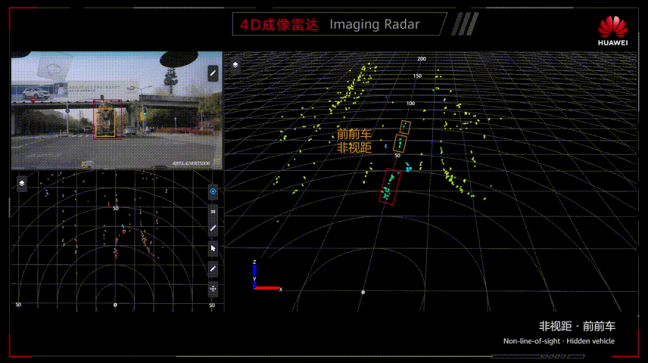
(3)华为
(4)特斯拉
(5)傲酷
从本文开始,博主将做一个4D成像雷达专栏,主要分析当下的4D成像雷达前沿技术和工程应用技术,帮助读者认识4D成像雷达。当然,其他种类的雷达也可以借鉴4D成像雷达技术,因为大多数内容是相通的。所有文章的Word版会陆续放在了年度会员文章库中,会员可直接下载阅读。
【本期结束】
| 序号 | 类别 | 内容 | 文件路径 |
|---|---|---|---|
| 1 | 雷达文章 | 本文内容Wrod版 | 根目录雷达文章库 |
【点击以下链接可直达各个业务模块】
| 加入年度会员(专属VIP群) | |
|
雷达项目交流与合作 |
|
本文是空闲时个人的心得体会,仅供参考。目前我还有很多内容需要学习,如果还有没有说到或者不全面的地方,还请指正,感谢大家。喜欢本文,可以转发朋友圈。欢迎关注备用号【跳频连续波】。
审核编辑黄宇
-
成像
+关注
关注
2文章
231浏览量
30475 -
雷达
+关注
关注
50文章
2929浏览量
117456 -
4D
+关注
关注
0文章
61浏览量
11559
发布评论请先 登录
相关推荐
拥抱自动驾驶,4D成像毫米波雷达已悄然崛起!
剖析如何做好一款4D高分辨毫米波雷达

什么是4D毫米波雷达?
4D毫米波雷达加速了4D成像系统的可能性
4D毫米波雷达发展到哪一步了?国内18家供应商技术盘点
4D毫米波雷达市场技术盘点
经纬恒润新产品系列 | 4D成像毫米波雷达

对比ZF和特斯拉的4D毫米波雷达设计,国产4D毫米波雷达迅速崛起

经纬恒润4D成像毫米波雷达亮相 CES 2024





 工商网监
工商网监
评论