 埋在沙子中雷达目标的相干雷达成像和检测
埋在沙子中雷达目标的相干雷达成像和检测
无人机探地合成孔径雷达(SAR)将无人机和雷达技术结合起来,可以对地面进行高分辨率的成像。这项技术可以应用于军事、民用和科学领域,例如对地形进行三维成像、监测冰川变化、或者搜索失联人员等等。它的优点是高效、准确、灵活和经济,可以在短时间内完成大面积成像任务。此外,它的低视距优势,还可以避免由于气候和地形等因素所产生的影响。 下面视频中介绍的是其中一个应用场景:地雷探测。 视频简单介绍了系统功能,自主导航和定位是生成高质量GPSAR图像的先决条件。该系统采用的是大疆M600 Pro微型无人机(MAV),载重高达6.0kg。用户能够指定一个地理参考的GPSAR任务,然后MAV自主执行。着陆后,MAV从同步的GNSS和IMU测量数据中自动计算精确的雷达天线位置,并输入到雷达成像过程中。 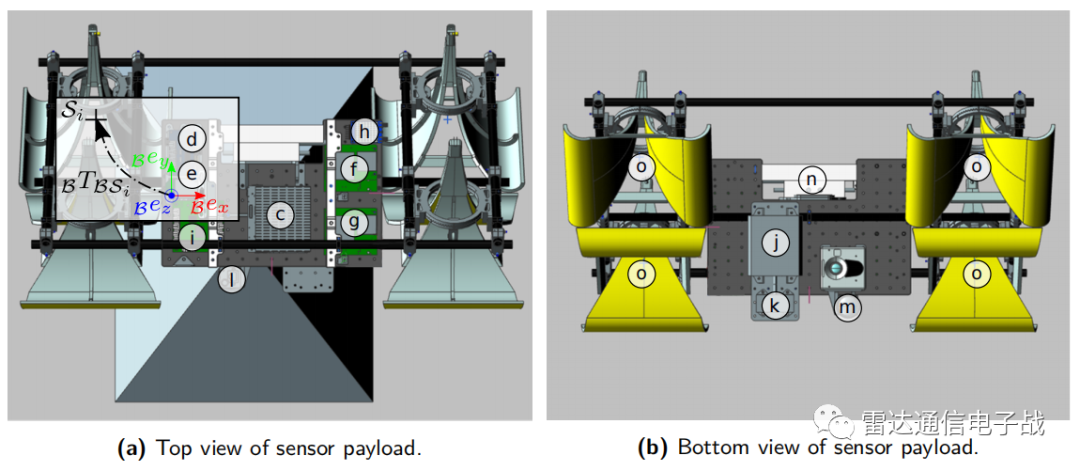 如上图所示,板载计算单元(c)功能强大,可以记录传感器数据,在线计算导航解决方案,并通过自动驾驶仪和机器人操作系统(ROS)控制来MAV。VersaVIS (d)是一个带有外设的MCU,用于连接传感器。IMU(e)和两个GNSS接收器(f)和(g),再加上两个螺旋三波段天线和校正调制解调器(h),构成了精确平台定位所需的高精度导航解决方案的基础。 所有组件均由单个电源板(i)供电,该电源板能够将MAV的18v电源从机载电池转换为5V,12V和24V。在吊舱的底部,雷达高度计(j)和激光雷达高度计(k)用于测量平台相对于地面的高度(AGL)。相机(l)和镜头(m)生成航拍图像,构建用于路径规划和雷达成像的摄影测量图。 另外,定制的1GHz至4GHz FMCW雷达(n)及其四个不同极化方向的喇叭天线(o)被用于GPSAR图像。相机相对于IMUBTBS5的姿态通过校准软件确定。
如上图所示,板载计算单元(c)功能强大,可以记录传感器数据,在线计算导航解决方案,并通过自动驾驶仪和机器人操作系统(ROS)控制来MAV。VersaVIS (d)是一个带有外设的MCU,用于连接传感器。IMU(e)和两个GNSS接收器(f)和(g),再加上两个螺旋三波段天线和校正调制解调器(h),构成了精确平台定位所需的高精度导航解决方案的基础。 所有组件均由单个电源板(i)供电,该电源板能够将MAV的18v电源从机载电池转换为5V,12V和24V。在吊舱的底部,雷达高度计(j)和激光雷达高度计(k)用于测量平台相对于地面的高度(AGL)。相机(l)和镜头(m)生成航拍图像,构建用于路径规划和雷达成像的摄影测量图。 另外,定制的1GHz至4GHz FMCW雷达(n)及其四个不同极化方向的喇叭天线(o)被用于GPSAR图像。相机相对于IMUBTBS5的姿态通过校准软件确定。 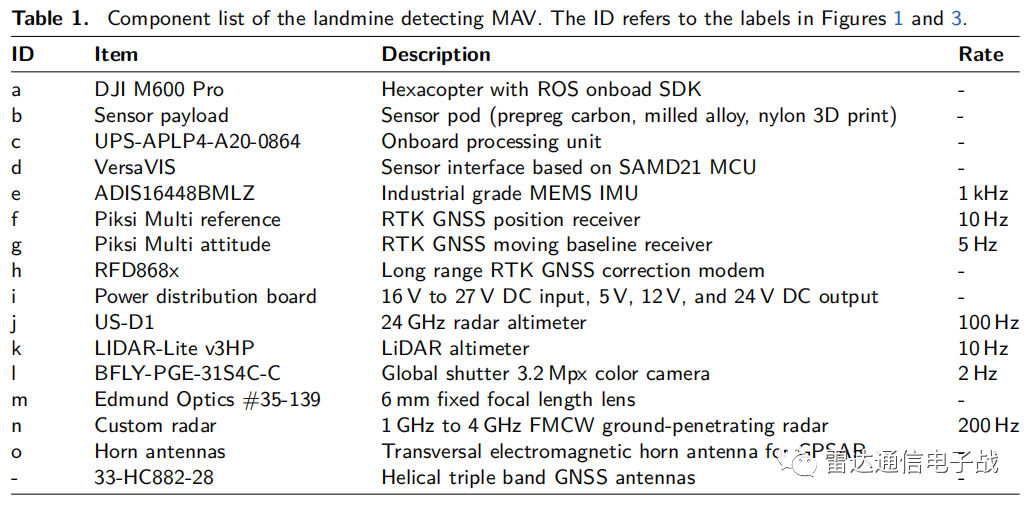 为了安全起见,操作人员可以随时使用遥控器(RC)中断任务。任务本身也可以根据地理参考地图,在现场或办公室的操作人员笔记本电脑上进行规划,如下图b所示。 在测量RTK GNSS基站位置后,任务自动执行,所有处理和数据记录都在图c所示的有限状态机控制的平台上进行。有限状态机启动传感器记录并自动起飞MAV。平台上升到无碰撞高度,例如30米,先飞行到任务开始上方的位置。然后下降到任务高度,执行预先规划的轨迹。完成后,平台飞回高空,返回起飞位置,最后自动着陆。着陆后从板载计算机下载传感器和定位数据,传给光学或雷达成像处理器。
为了安全起见,操作人员可以随时使用遥控器(RC)中断任务。任务本身也可以根据地理参考地图,在现场或办公室的操作人员笔记本电脑上进行规划,如下图b所示。 在测量RTK GNSS基站位置后,任务自动执行,所有处理和数据记录都在图c所示的有限状态机控制的平台上进行。有限状态机启动传感器记录并自动起飞MAV。平台上升到无碰撞高度,例如30米,先飞行到任务开始上方的位置。然后下降到任务高度,执行预先规划的轨迹。完成后,平台飞回高空,返回起飞位置,最后自动着陆。着陆后从板载计算机下载传感器和定位数据,传给光学或雷达成像处理器。 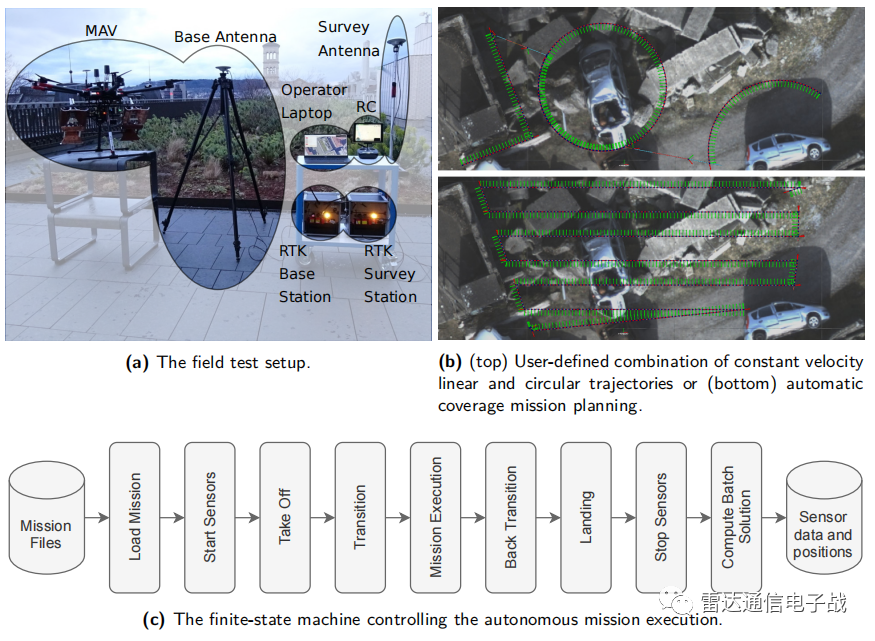 关于该试验的文献资料共40页,详细介绍了系统工作原理和过程,并试验验证了定位精度,实现了对埋在沙子中雷达目标的相干雷达成像和检测,验证了其用于地雷探测的潜力。
关于该试验的文献资料共40页,详细介绍了系统工作原理和过程,并试验验证了定位精度,实现了对埋在沙子中雷达目标的相干雷达成像和检测,验证了其用于地雷探测的潜力。
-
传感器
+关注
关注
2553文章
51511浏览量
757256 -
软件
+关注
关注
69文章
5034浏览量
88184 -
雷达
+关注
关注
50文章
2974浏览量
118140
原文标题:无人机探地SAR的应用场景之一:地雷探测
文章出处:【微信号:雷达通信电子战,微信公众号:雷达通信电子战】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
射频测量在现代雷达和电子战信号设计验证的应用
C2激光相干成像雷达在巡航导弹导航及战术弹道导弹末制导中的应
MIMO雷达的相干脉冲串检测性能
基于FPGA雷达成像方位脉冲压缩系统的设计
双基地MIMO雷达相干目标角度估计
基于Xilinx开发平台和FPGA器件实现一维成像雷达目标识别







 工商网监
工商网监
评论