 RA6T2无传感器矢量控制应用笔记 [3] 控制程序描述 (1)
RA6T2无传感器矢量控制应用笔记 [3] 控制程序描述 (1)

3. 控制程序描述
介绍本应用笔记的目标软件。
3.1 控制的内容
3.1.1 电机启动/停止
电机的启动和停止通过来自“Renesas Motor Workbench”或SW1的输入控制。
为SW1指定一个通用端口,并根据其电平控制电机运行。
“高”电平 à 电机启动
“低”电平 à 电机停止
3.1.2 A/D转换器
1
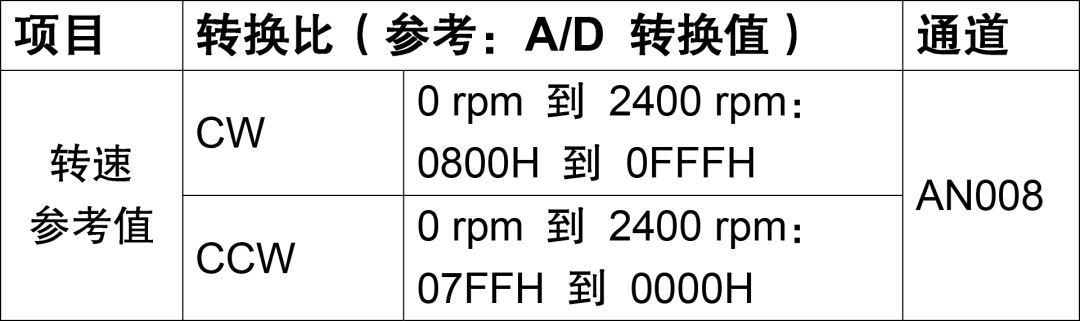
电机转速参考值
电机的转速命令值通过来自“Renesas Motor Workbench”的输入或VR1的输出值(模拟值)来确定。来自VR1的转速命令值的测量如下表所示。
表3-1 转速参考值的转换比
2
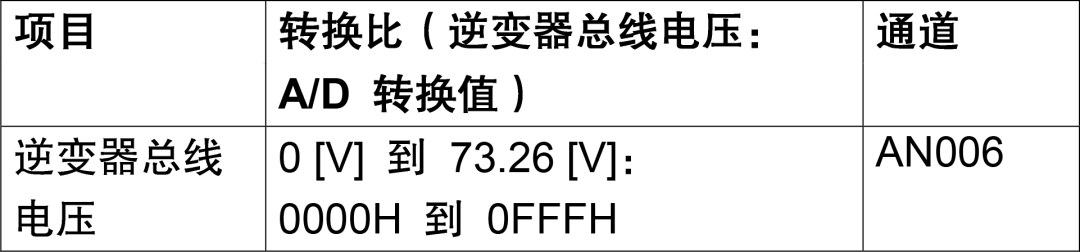
逆变器总线电压
逆变器总线电压的测量如下表所示。此电压用于计算调制比以及过电压和欠电压检测(出现异常时PWM停止)。
表3-2 逆变器总线电压转换比
3
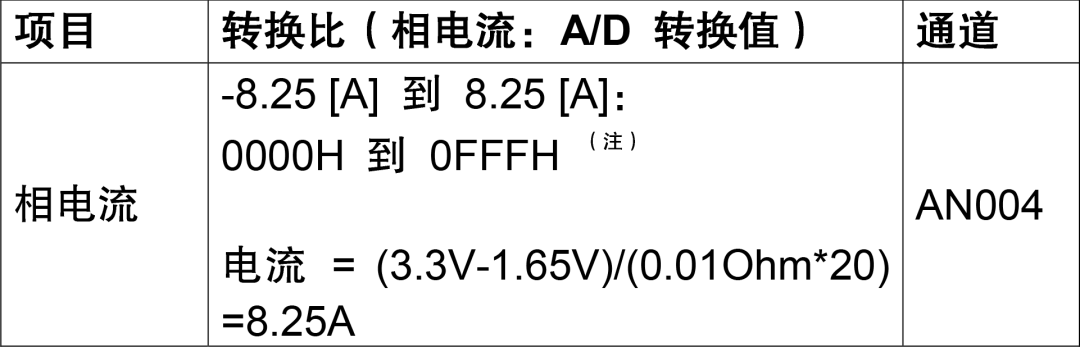
单电阻时的相电流
相电流的测量如表3-3所示,用于矢量控制。
表3-3 相电流转换比
注:
有关A/D转换特性的更多详细信息,请参见“RA6T2系列用户手册:硬件”。
3.1.3 调制
本应用笔记的目标软件采用脉宽调制(下文中称为 PWM)来生成电机的输入电压。PWM波形通过三角波比较方法来生成。
1
三角波比较方法
三角波比较方法用于输出电压命令值。通过该方法,输出电压的脉宽可通过比较载波波形(三角波)与电压命令值波形来确定。当电压命令值大于或小于载波波形时,可通过相应接通或关断开关的方法来输出近似正弦波的电压命令值。
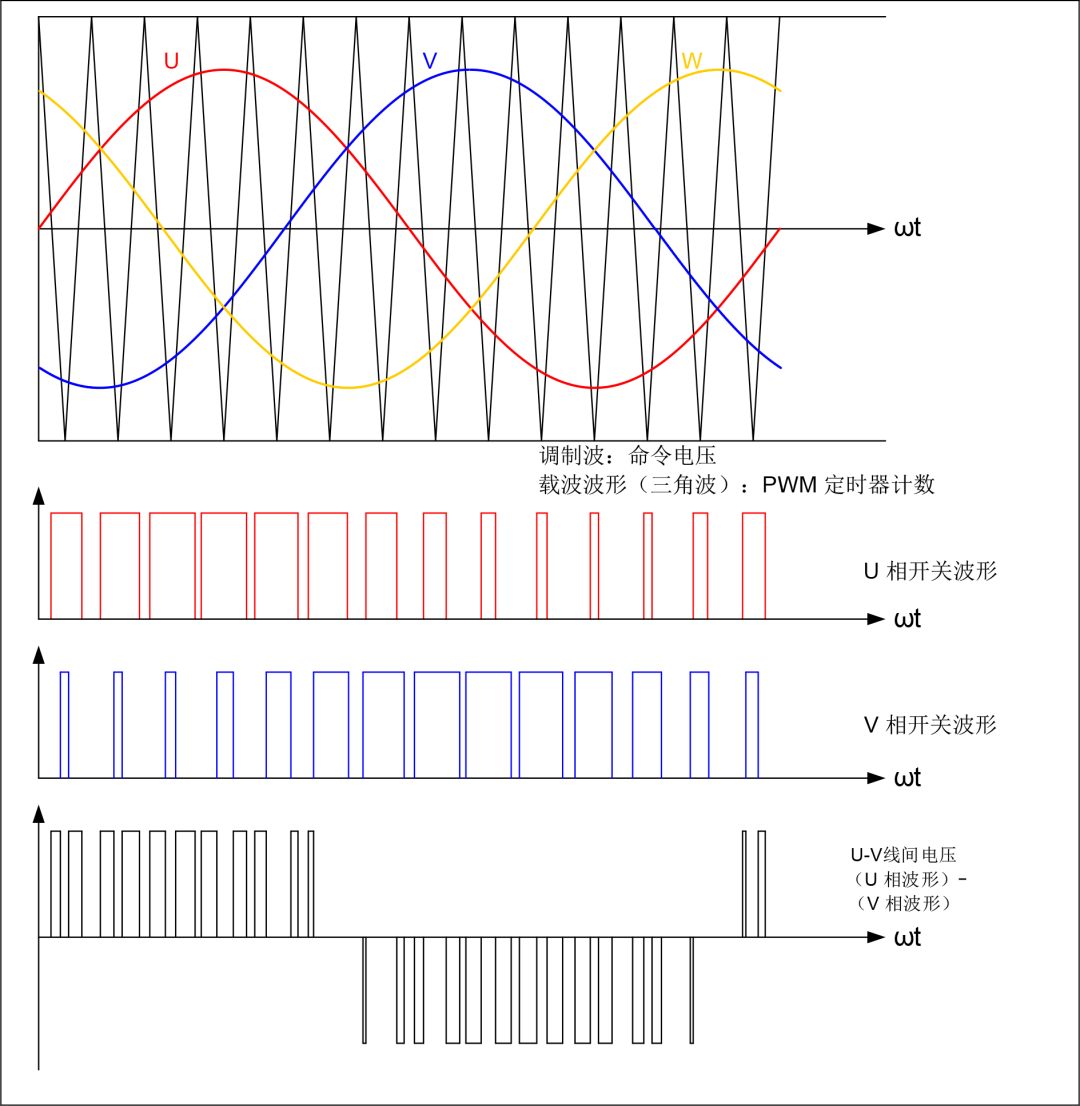
图3-1 三角波比较方法概念图
如图3-2所示,输出电压脉冲时间与一个载波周期之比称为占空比。
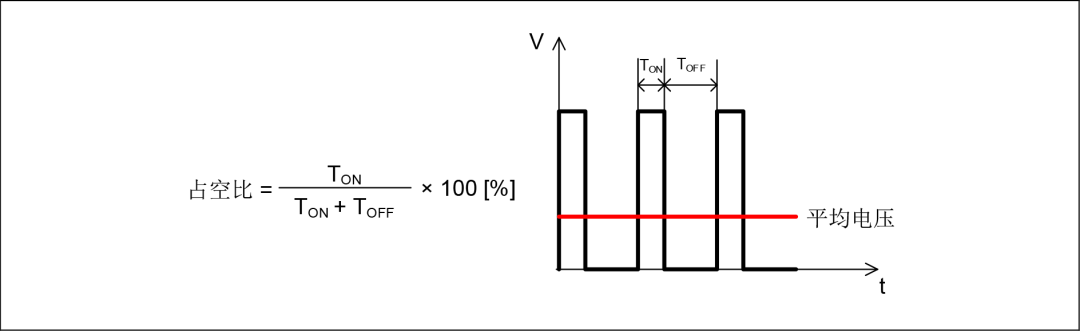
图3-2 占空比定义
调制系数“m”定义如下。

所请求的控制可通过将此调制系数设置为确定PWM占空比的寄存器值来执行。
3.1.4 状态转换
图3-3是无传感器矢量控制软件的状态转换图。在本应用笔记的目标软件中,软件状态受“系统模式”控制。电机1和2的控制方法相同。
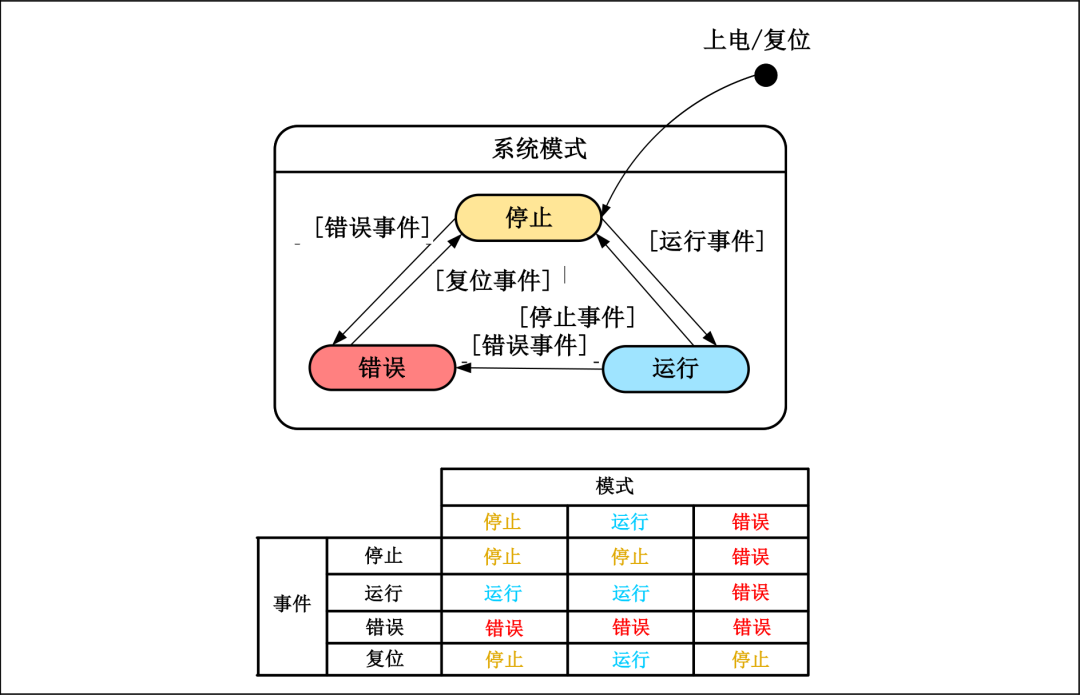
图3-3 无传感器矢量控制软件的状态转换图
1
系统模式
“系统模式”指示系统的运行状态。每当有事件发生时,状态都会转换。“系统模式”具有3个状态:电机驱动停止(非活动)、电机驱动(活动)和异常状况(错误)。
2
事件
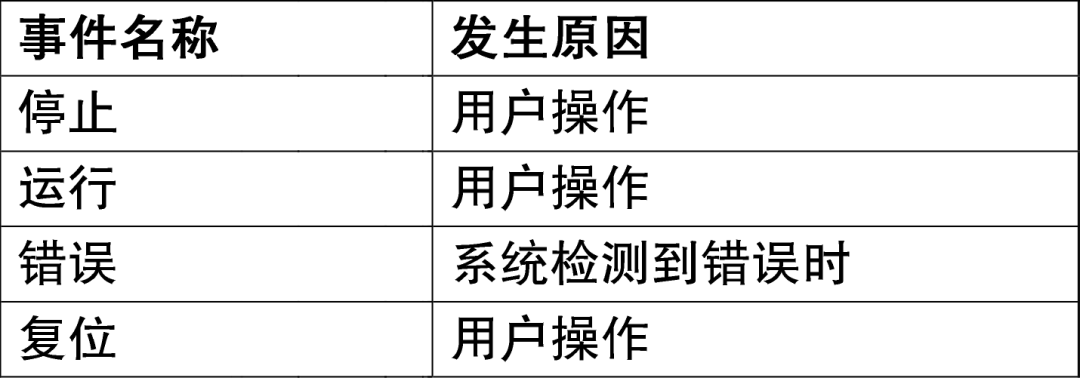
在每种“系统模式”下有“事件”发生时,“系统模式”都会根据具体“事件”发生变化,如上图3-3所示。各个事件的发生原因如下所示。
表3-4 事件列表
3.1.5 启动方法
图3-4显示了无传感器矢量控制软件的启动控制。每种模式均通过管理d轴电流、q轴电流和速度的各个参考值的标记来控制。
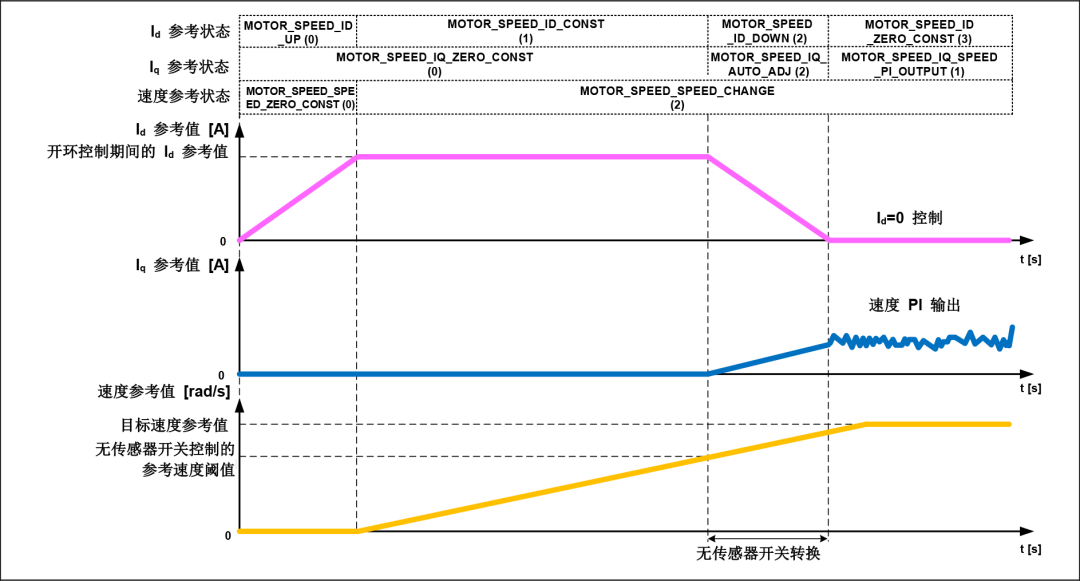
图3-4无传感器矢量控制软件的启动控制
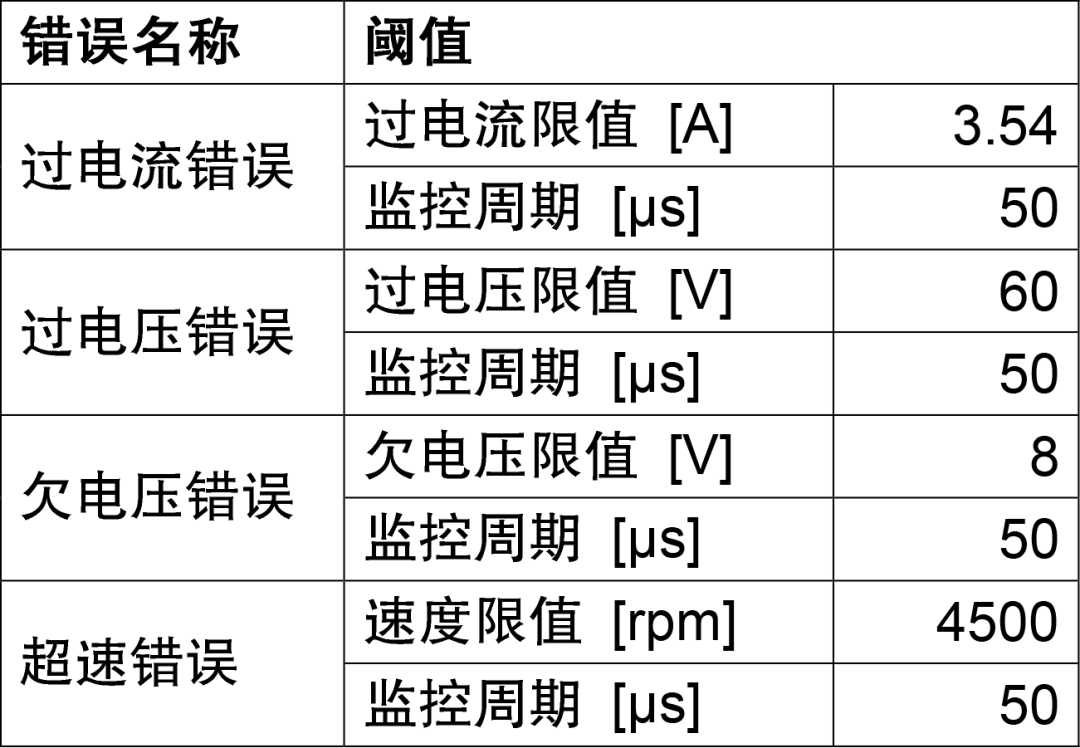
3.1.6 系统保护功能
本控制软件具有以下错误状态,发生相应错误时执行紧急停止功能。表3-5列出了系统保护功能的各个软件阈值。
3
过电流错误
有两种过电流保护。
硬件OCP:检测到来自硬件的紧急停止信号时,PWM 输出端口被自动设置为高阻抗输出(无软件干预)。
软件OCP:在过电流监控周期内对 U、V和W相电流进行监控。检测到过电流时,CPU执行紧急停止。
3
过电压错误
在过电压监控周期内对逆变器总线电压进行监控。检测到过电压(电压超出过电压限值)时,CPU执行紧急停止。这里的过电压限值在设置时会将检测电路电阻值的误差考虑在内。出现此误差时,CPU在出错的电机一端执行紧急停止。
3
欠电压错误
在欠电压监控周期内对逆变器总线电压进行监控。检测到欠电压(电压低于限值)时,CPU执行紧急停止。这里的欠电压限值在设置时会将检测电路电阻值的误差考虑在内。出现此误差时,CPU在出错的电机一端执行紧急停止。
3
超速错误
在转速监控周期内对转速进行监控。当速度超出限值时,CPU执行紧急停止。出现此误差时,CPU在出错的电机一端执行紧急停止。
表3-5 系统保护功能的设置值
未完待续_
-
mcu
+关注
关注
147文章
19110浏览量
403252 -
瑞萨
+关注
关注
38文章
22516浏览量
91164
发布评论请先 登录
RA6T1微控制器:功能特性、电气参数与设计要点解析
深入剖析RA6T3微控制器:特性、应用与设计考量
瑞萨RA2T1微控制器:低功耗设计的理想之选
Renesas MCK - RA6T2电机控制评估套件:设计与应用全解析
探索RA6T2微控制器:高性能与多功能的完美融合
探索Renesas RA6T1 CPU Card:助力电机控制评估新体验
Renesas MCK - RA6T3:开启电机控制新篇章
探索RA6T3微控制器:性能、特性与应用全解析
深入剖析RA2T1微控制器:特性、电气参数与设计要点
Renesas MCK - RA8T2电机控制评估套件:设计与应用全解析
瑞萨电子基于RA6T2的高频注入法方案详解

瑞萨电子推出RA2T1系列微控制器




评论