 直流无刷电机的工作原理及Matlab/Simulink仿真分析
直流无刷电机的工作原理及Matlab/Simulink仿真分析
前言
系列文章将更新直流无刷电机的工作原理、仿真控制以及应用STM32开发板与驱动板完成对直流无刷电机的实际控制。
一、直流无刷电机简介
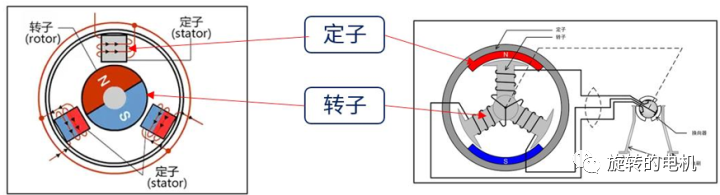
直流无刷电机(Brushless Direct Current Motor,BLDC)没有了直流有刷电机的电刷及换向器等结构,线圈绕组不参与旋转而是作为定子,永磁体作为转子,通过控制线圈电流方向来改变磁场方向,从而使转子持续旋转。 与直流有刷电机相比直流无刷电机使用寿命长、噪音低、转速快,但是价格较高,控制较为复杂。 下图为直流有刷电机与直流无刷电机的结构图对比。
二、直流无刷电机的工作原理
通电导体产生磁场,方向由安培定则确定。 磁场具有同性相吸,异性相斥的特性,BLDC正是利用通电线圈与永磁体的相互作用原理实现旋转,如下图所示。
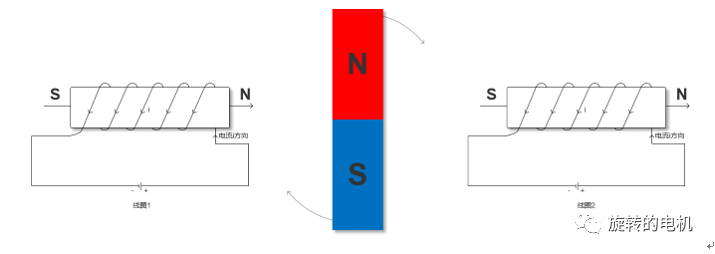
两边的线圈(定子)通电后,由安培定则可知两个通电线圈将产生方向向右的磁场,此时中间的永磁体(转子)会尽量使自己的内部磁感应线方向与外部磁感应线方向一致,形成一个最短磁力闭合回路,N极与S极相互吸引,从而使永磁体顺时针旋转。 当永磁体旋转至水平位置时将不受外部磁场作用力,但由于惯性作用永磁体还会继续沿顺时针转动,此时交换两个线圈中的电流方向,转子会继续沿顺时针方向转动,周而复始使永磁体一直沿顺时针旋转。

直流无刷电机的机构简图如上图所示,定子绕组为三相星型联结,加上转子位置如下图所示:

在A相加电源正极,B相加电源负极,线圈A、B将产生如上图所示的磁场BA、BB,由于磁场是矢量,所以线圈BA、BB产生的合成磁场为B,此时转子就会保持在图中位置。 BLDC的运行方式为绕组的两两导通,所以三相线圈A 、B、C的导通组合只有6中情况,通过合理的顺序依次切换三相绕组的通电顺序就可使转子跟着磁场旋转起来,如下图所示:
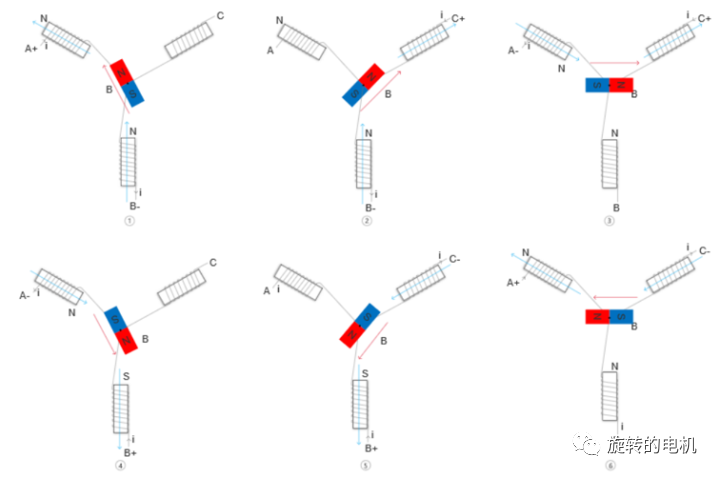
1)A端接正电压,B端接负电压,C端悬空,转子将会旋转至上图1位置;
2)在1)的基础上,C端接正电压,B端接负电压,A端悬空,转子将会从上图1位置旋转至图2位置;
3)在2)的基础上,C端接正电压,A端接负电压,B端悬空,转子将会从上图2位置旋转至图3位置;
4)在3)的基础上,B端接正电压,A端接负电压,C端悬空,转子将会从上图3位置旋转至图4位置;
5)在4)的基础上,B端接正电压,C端接负电压,A端悬空,转子将会从上图4位置旋转至图5位置;
6)在5)的基础上,A端接正电压,C端接负电压,B端悬空,转子将会从上图5位置旋转至图6位置;
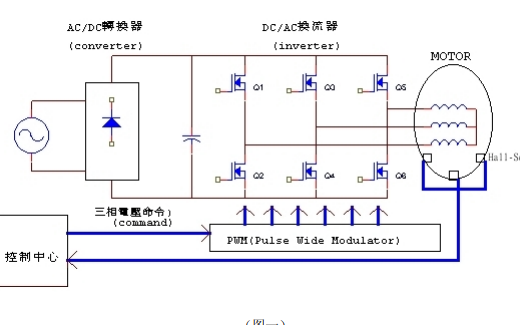
当转子旋转至上图6的位置时,重复1)的通电状态,转子将会从上图6的位置旋转至图1的位置。经过上述6个过程转子刚好旋转一圈,这种驱动方法即为BLDC的6步换相控制。通过三相逆变电路可以简单方便的实现BLDC的六步换相,如下图所示:

注:上述图片U、V、W分别对应A、B、C三相输入端。
上述六步换向法驱动BLDC的前提条件是我们必须知道电机转子的当前位置,无刷直流电机一般配有霍尔传感器用于获取电机转子位置。霍尔器件搭配外围电路可将检测到的磁场的变化转换为高低电平信号进行输出,以霍尔传感器为参照物,定子旋转时霍尔信号检测到的磁场变化及输出信号如下图所示:
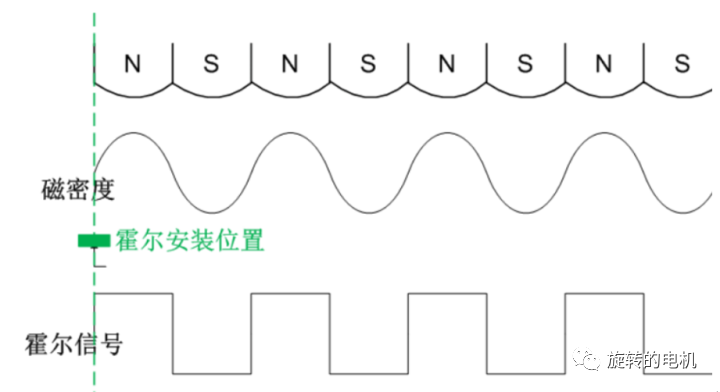
同无刷直流电机均匀分布的定子一样,用于输出3路磁场信号的3个霍尔传感器也是均匀分布在无刷直流电机的一周,相邻两个传感器的电角度相差120°。电机按一定方向转动时,三路霍尔信号的输出会按照六步的规律变化,如下图所示:

通过三路霍尔信号的输出波形就可判断出无刷直流电机当前的转子位置,三路霍尔信号的输出波形同样满足六步一周期,再根据当前转子位置进行三相逆变电路上下桥臂的导通,如下表所示:
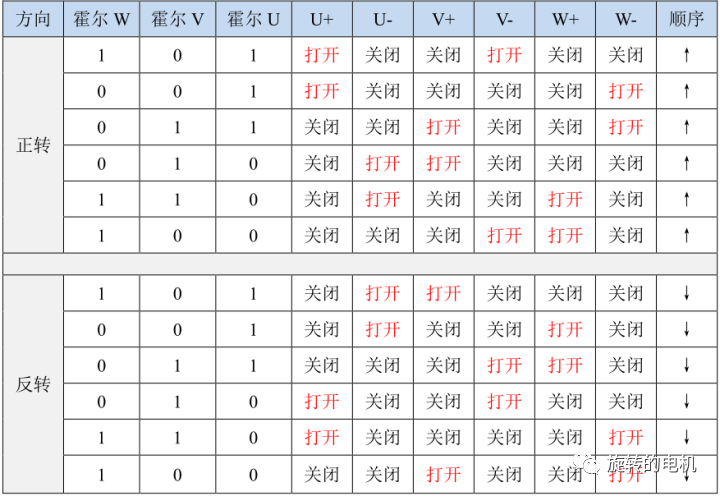
注:不同电机的六步换相控制逻辑表不同
由上述分析可推出无刷直流电机六步换相的驱动整体驱动方案如下:

三、直流无刷电机的驱动及仿真
由上述分析的无刷直流电机的工作原理,采用六步换相法驱动直流无刷电机的转动(开环驱动,速度不可调)。
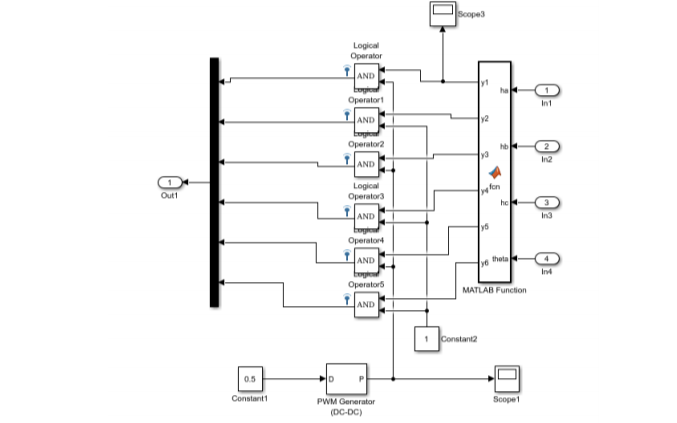
在Matlab/Simulink中搭建仿真模型如下,该模型采用六步换向法对电机进行开环控制,转速不可调。
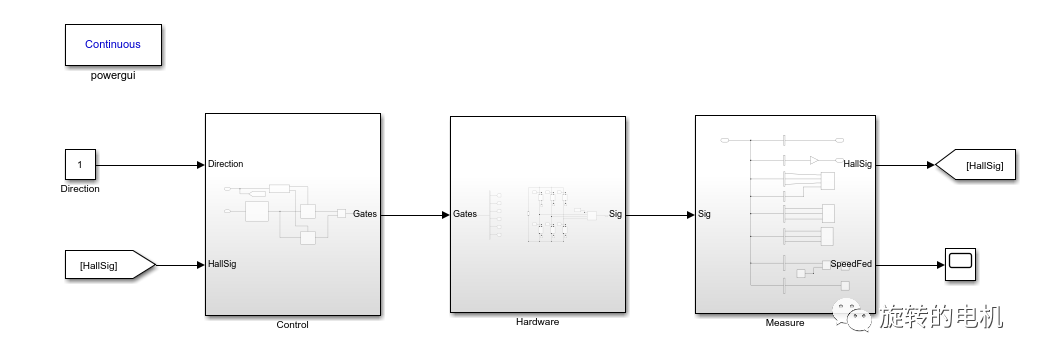
注:该模型采用离散求解器没有运行结果,至今未查明原因
3.1.1、仿真电路分析

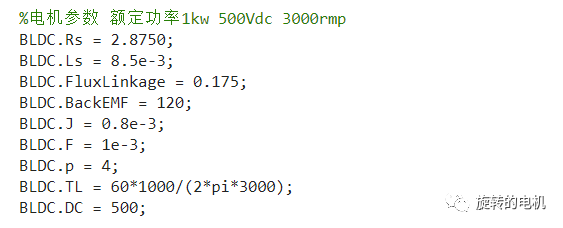
主电路包括:三相逆变电路和BLDC直流无刷电机两部分,BLDC的电机额定功率设置为1kw,额定电压500V,额定转速3000RMP,采用恒功率负载TL设置为10/π,电机具体参数如下所示。
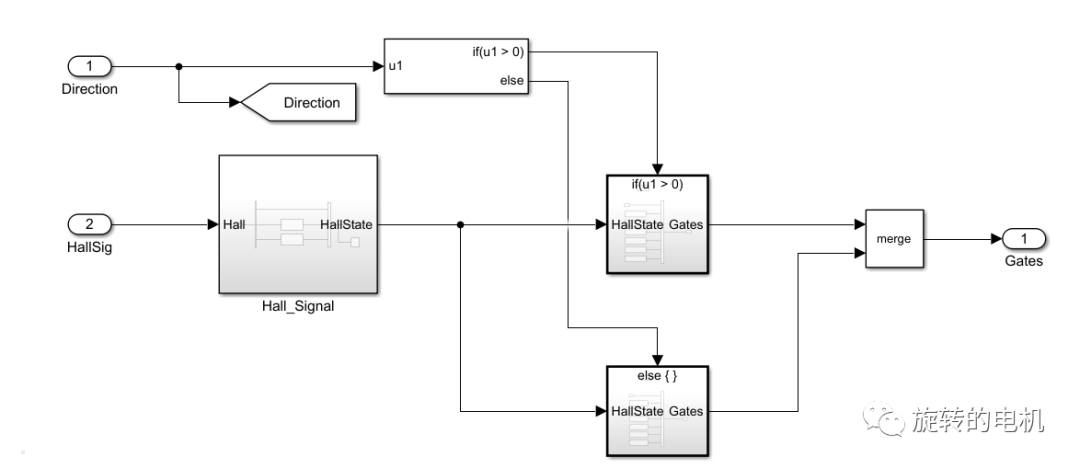
控制部分包括:霍尔信号处理和六步换相两部分。 根据霍尔信号判断转子当前所在的位置进而控制三相逆变电路的两两导通,根据设定Driection值进行电机正反转驱动。 该电机的换相表如下所示。

信号监测:监测BLDC输出的信号。
3.1.2、仿真结果分析
3.1.2.1、电机正转
Direction设置为1,实现电机正转。
电机转速:在0.1s加入额定负载TL

Hall信号:

反电动势:梯形波

电机定子电流:

电磁转矩:

转子位置:

3.1.2.2、电机反转
Direction设置为0,实现电机反转。
电机转速:在0.1s加入额定负载TL

Hall信号:

反电动势:梯形波

电机定子电流:

电磁转矩:

转子位置:

总结
本章节分析了直流无刷电机的工作原理,并通过Matlab/Simulink采用六步换相法实现了直流无刷电机的驱动及正反转控制,为后续章节的分析奠定基础
-
matlab
+关注
关注
187文章
2988浏览量
232153 -
STM32
+关注
关注
2281文章
10967浏览量
359904 -
Simulink
+关注
关注
22文章
537浏览量
63143 -
开发板
+关注
关注
25文章
5260浏览量
99703 -
直流无刷电机
+关注
关注
15文章
301浏览量
24005
发布评论请先 登录
相关推荐
matlab仿真直流电机与基于Matlab/Simulink的无刷直流电机控制仿真研究
基于Matlab/Simulink的无刷直流电机控制仿真研究
Simulink无刷直流电机仿真方案的建模过程详细说明
基于MATLAB-SIMULINK的直流电机模糊控制的仿真

直流无刷电机及Matlab/Simulink驱动仿真说明
直流无刷电机转速闭环调速系统及Matlab/Simulink仿真分析





 工商网监
工商网监
评论