 KUKA系统变量:$IOBUS_INFO[]读取是否出现总线故障
KUKA系统变量:$IOBUS_INFO[]读取是否出现总线故障

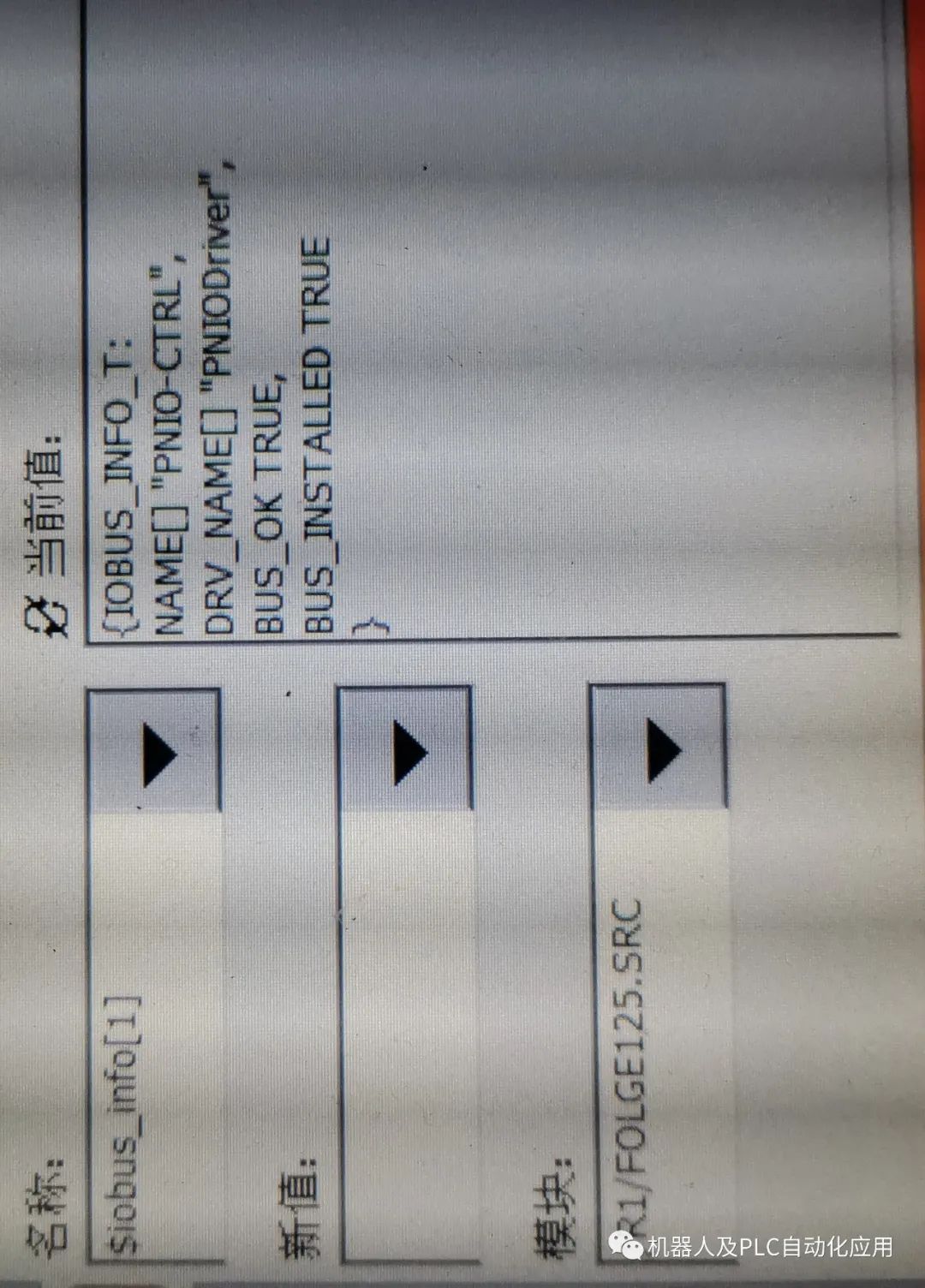
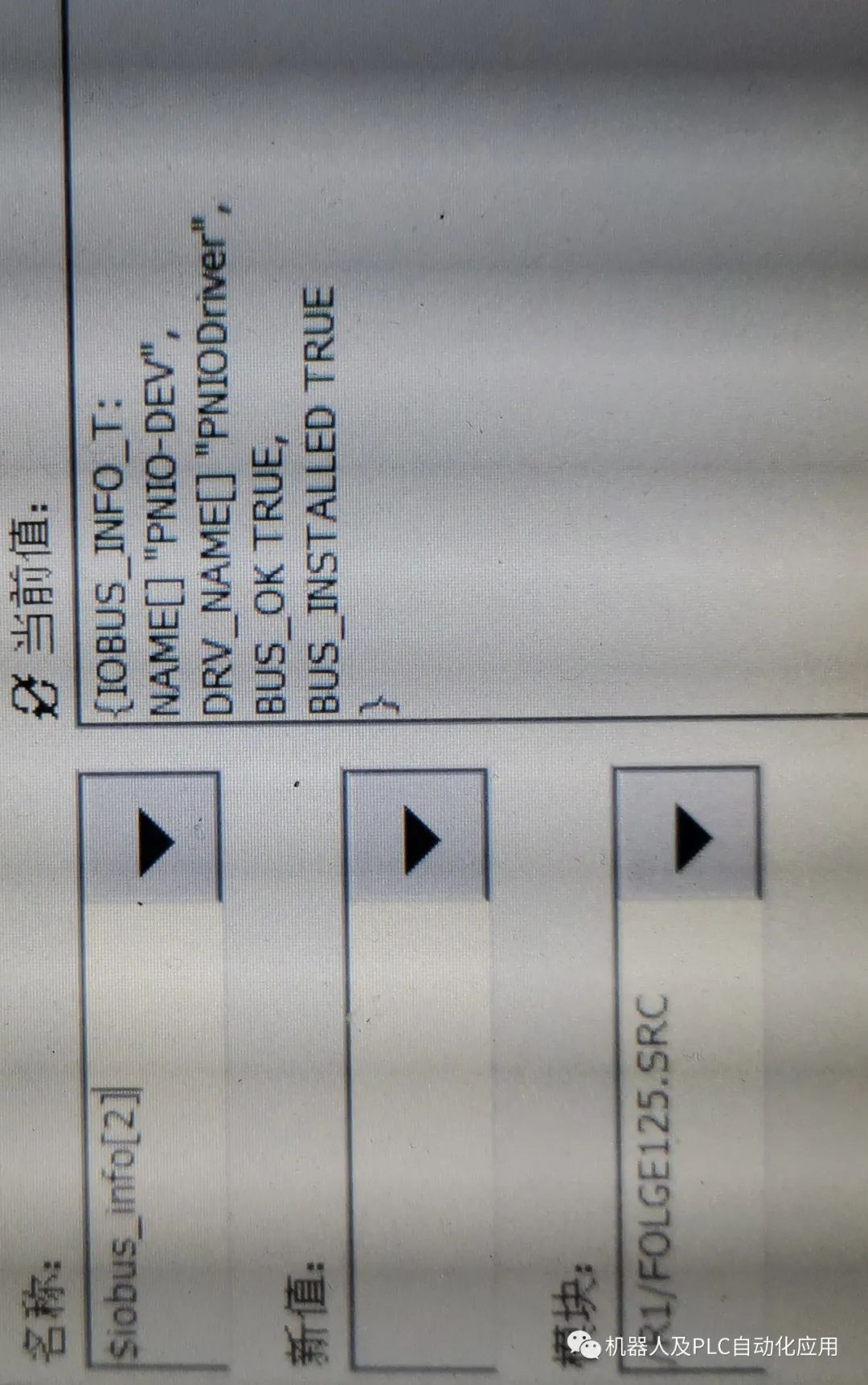
$IOBUS_INFO[]
具有有关总线驱动程序信息的结构
$IOBUS_INFO[Index ]=Information
Index: 网络号,序列号会自动分配给总线驱动程序。
Information: 类型: Iobus_Info_T, 列出有关总线驱动程序的信息
STRUC Iobus_Info_T CHAR name[256], drv_name[256], BOOL bus_ok, bus_installed
name[] : 总线实例的名称,例如 SYS-X44
drv_name[] : 总线驱动程序的名称,例如 ECat.DRV
bus_ok: TRUE:总线驱动程序正常。
FALSE:总线驱动程序有故障或不兼容。
bus_installed: TRUE:已安装总线驱动程序。
FALSE:未安装总线驱动程序。
激活 / 停用总线故障
借助 IOCTL 函数可停用并再次激活总线故障。在默认情况下激活总线故障。如果出现总线故障,这会导致停止和 / 或锁定激活命令。
可为一个或多个总线实例停用总线故障。如果总线故障被停用,会有如下表现:
总线故障:不停止和 / 或锁定激活命令
总线故障:smartHMI 信息窗口中没有故障信息
smartHMI 信息窗口中会显示以下信息:
KRC IO 总线错误抑制针对下列总线实例激活:{ 总线实例 }{ 总线实例 }{总线实例 }
如果总线实例中已出现故障,则无法再次激活总线故障。
该情况下可通过系统变量 $IOBUS_INFO[] 读取是否出现总线故障。
激活和停用可以通过 HMI 或 KRL 执行。
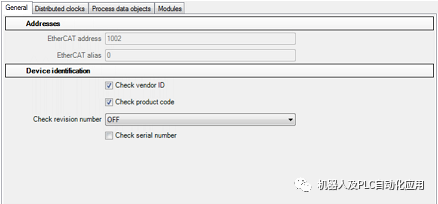
EtherCAT 地址: 自动分配 EtherCAT 地址。该地址可在拓扑编辑器中更改。
EtherCAT Alias: 可脱开设备的 Alias 地址,例如 EMD在运行期间耦合或解耦可脱开设备时,需要该 Alias 地址。
检查制造商识别号:
勾选: 启动设备时检查制造商 ID。
未勾选: 不检查制造商 ID。
检验产品号;
勾选:启动设备时检查产品编号。
未勾选:不检查产品编号。
检查审核编号:
检查设备版本号的方法。可选的版本号取决于设备。
OFF: 不检查版本号。
EQ: 检查版本号是否一致。
LW_EQ : 检查版本号的 16 低位字元是否一致。
从设备说明文件中读取默认设置。
检查系列号;
勾选:启动设备时检查序列号。
未勾选: 不检查序列号。
审核编辑:刘清
-
HMI
+关注
关注
9文章
736浏览量
52441 -
DRV
+关注
关注
0文章
18浏览量
20993 -
KUKA机器人
+关注
关注
4文章
144浏览量
10121
原文标题:KUKA 系统变量:$IOBUS_INFO[]读取是否出现总线故障
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
KUKA焊接机器人伺服电机常见故障及维修处理
探究$err 故障变量的用法
探究IOBUS_INFO[]读取是否会出现总线故障
![探究<b class='flag-5'>IOBUS_INFO</b>[]<b class='flag-5'>读取</b><b class='flag-5'>是否</b>会<b class='flag-5'>出现</b><b class='flag-5'>总线</b><b class='flag-5'>故障</b>](https://file.elecfans.com/web1/M00/EE/6A/pIYBAGCWBbyAX-AwAAAYSRZEjrw906.png)
![$<b class='flag-5'>IOBUS_INFO</b>[]<b class='flag-5'>读取</b><b class='flag-5'>是否</b><b class='flag-5'>出现</b><b class='flag-5'>总线</b><b class='flag-5'>故障</b>](https://file1.elecfans.com/web2/M00/88/AD/wKgaomRvBpGAIymvAAAYSRZEjrw131.png)



评论