 如何对spmv算法进行优化
如何对spmv算法进行优化
主要是介绍如何对spmv算法进行优化。Spmv,即稀疏化的矩阵向量乘操作,关于稠密的矩阵向量乘操作,已经在上一篇文章中介绍过了。关于稀疏kernel的优化,是CUDA优化中最难的一部分,其难度在于稀疏特性千差万别,需要针对不同的应用、不同的数据选择不同的数据存储格式,然后再根据不同的数据特点进行特定的并行算法设计。而现实生活中,尤其是科学计算里面,基本上都是稀疏问题。在深度学习领域中,也一直有针对稀疏模型的研究,主要是针对推理方向,将模型进行剪枝之后,直接减少了计算量来达到对模型的加速目的。但实际上,为了保证模型的精度,稀疏度有限,且稀疏问题很难充分地利用硬件性能,导致了这一条路线其实并不好走。唠唠叨叨说了挺多,总之,稀疏kernel的优化是一个非常难的话题。本文会详细地介绍一下spmv。
一、前言
在说spmv之前,说一下稀疏格式。当矩阵中的绝大多数元素都是0时,需要一些特殊的格式来存储非零元素。这些格式也就是稀疏格式,常用的稀疏格式有:COO、CSR、DIA、ELL、HYB。深度学习领域还有blocked CSR、blocked ELL等。具体的稀疏格式总结见以下链接:
稀疏矩阵存储格式总结+存储效率对比:COO,CSR,DIA,ELL,HYB - Bin的专栏 - 博客园www.cnblogs.com/xbinworld/p/4273506.html
在本文中,使用CSR格式存储稀疏矩阵,后续所说的一系列优化也是针对CSR格式而言。说完了稀疏格式,现在再来说一下spmv,即稀疏矩阵向量乘。稠密的矩阵向量乘,即gemv已经在之前说过了。具体的操作即给定稀疏矩阵A和向量x,需要计算两者的乘积y。示意图如下。
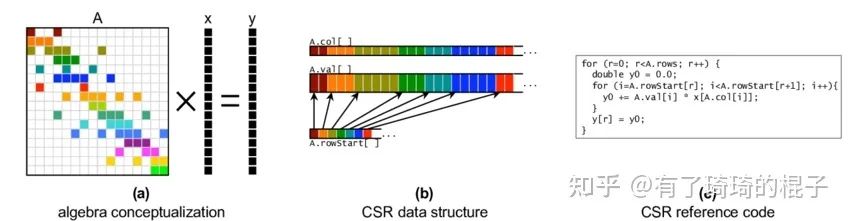
spmv介绍
二、并行算法设计
并行算法设计,主要是block和thread的设计,在这里主要参考了cusp的实现。有一个很重要的考虑是workload的分配。我们需要使用多少个线程来负责A矩阵中一行的计算?需要说明的是,在不同的数据特性下,需要采用不同的取值。如果这一行的元素非常多,那使用一个warp或者一个block,如果这一行只有一个元素,只需要一次乘加指令,那显然只能使用一个线程,毕竟用两个线程处理一个元素,怎么都不像正常人能干出的事。因而,我们假定一个参数,即THREADS_PER_VECTOR,来代表这个值。每THREADS_PER_VECTOR个线程为一组,他们需要负责A矩阵中一行元素的计算。
说完了这个核心思路,接下来看看每个线程需要干的工作。每个线程都要单独地对A矩阵的offset和index等进行读取,然后计算当前行的结果。如果每一行的元素特别少,比如这一行元素有4个,THREADS_PER_VECTOR就设为4,有8个元素就设为8,平均多少个元素,THREADS_PER_VECTOR就设为几,但上限是32。元素比32多的话,就多进行几个迭代即可。总之最多使用一个warp来处理一行元素。
至于如何得到一行元素有多少,row_offset数组长度除以y数组长度即可得。有必要在这里再提一句的是,这些参数的选择,以及对于不均衡的A矩阵元素如何处理,这些都是比较棘手的问题。有一大堆的论文在谈负载均衡和自动调参这两个事情,大家可以搜一下相关的论文瞅瞅。
讲完了思路,下面说一下具体的代码,如下:
template__device__ __forceinline__ float warpReduceSum(float sum) { if (WarpSize >= 32)sum += __shfl_down_sync(0xffffffff, sum, 16); // 0-16, 1-17, 2-18, etc. if (WarpSize >= 16)sum += __shfl_down_sync(0xffffffff, sum, 8);// 0-8, 1-9, 2-10, etc. if (WarpSize >= 8)sum += __shfl_down_sync(0xffffffff, sum, 4);// 0-4, 1-5, 2-6, etc. if (WarpSize >= 4)sum += __shfl_down_sync(0xffffffff, sum, 2);// 0-2, 1-3, 4-6, 5-7, etc. if (WarpSize >= 2)sum += __shfl_down_sync(0xffffffff, sum, 1);// 0-1, 2-3, 4-5, etc. return sum; } template __global__ void My_spmv_csr_kernel(const IndexType row_num, const IndexType * A_row_offset, const IndexType * A_col_index, const ValueType * A_value, const ValueType * x, ValueType * y) { const IndexType THREADS_PER_BLOCK = VECTORS_PER_BLOCK * THREADS_PER_VECTOR; const IndexType thread_id = THREADS_PER_BLOCK * blockIdx.x + threadIdx.x; // global thread index const IndexType thread_lane = threadIdx.x & (THREADS_PER_VECTOR - 1); // thread index within the vector const IndexType row_id = thread_id / THREADS_PER_VECTOR; // global vector index if(row_id < row_num){ const IndexType row_start = A_row_offset[row_id]; //same as: row_start = Ap[row]; const IndexType row_end = A_row_offset[row_id+1]; // initialize local sum ValueType sum = 0; // accumulate local sums for(IndexType jj = row_start + thread_lane; jj < row_end; jj += THREADS_PER_VECTOR) sum += A_value[jj] * x[ A_col_index[jj] ]; sum = warpReduceSum (sum); if (thread_lane == 0){ y[row_id] = sum; } } }
首先说一下传入的几个模板参数,IndexType代表索引类型,一般用int,如果矩阵十分巨大,可以考虑long long,ValueType代表数值存储的格式,科学计算一般都双精度,深度学习一般用单精度,或者fp16。推理甚至有一些int8这样的需求。THREADS_PER_VECTOR这个参数已经在前面说过了,VECTORS_PER_BLOCK则是代表一个block中有多少vector。我们尽可能地保证一个block有256个线程,所以VECTORS_PER_BLOCK = 256 / THREADS_PER_VECTOR。看完了模板参数,再看函数输入参数,分别是A矩阵的行数,A矩阵的CSR表示,有3个数组,然后是向量x和向量y。
接下来到了具体的kernel逻辑,首先计算了四个参数,需要注意的是thread_lane和row_id参数,thread_lane代表当前元素是当前组里面的第几个元素,row_id代表当前元素负责A矩阵中第几行的计算。接下来的逻辑也比较明了,先计算当前行对应的索引值,即row_start和row_end。定义sum变量来存储该行的计算结果,而后进行多次迭代,将每个线程对应的sum取出来,最后将sum元素进行warp的reduce_sum操作。最后将元素写到y向量中。
三、优化技巧
在上一节中已经把代码说完了,接下来盘点一下具体的优化技巧,以及优化中需要考虑的方方面面。
1、合理的block和thread调整。我一直觉得这个点是优化中最重要的一点。核心就是THREADS_PER_VECTOR需要根据实际的数据进行调整。这一点主要是考虑到如果使用更多的线程处理的话,只有THREADS_PER_VECTOR个线程在工作,其他的线程都被浪费了。
2、Shuffle指令减少访存的latency。在不使用shuffle指令的话,只能通过shared memory完成最后的求和操作。从shared memory中取数比寄存器之间直接访问要花费更多的latency。因而要尽可能地使用shuffle指令。
3、对于global memory的合并访存。对于稀疏问题,由于CSR格式中的col数组和val数组不能保证地址对齐,因而针对global memory的合并访存其实是有一定的困难。我们可以仔细地来进行分析。当A矩阵行数比较多的情况下,spmv主要的访存有3部分,分别是A_value,A_col_index和x。其中,对于A_value和A_col_index的访存是连续的,但是由于地址不能保证对齐,所以访存效率大概率不会太高。而对于x的访存本身就是不连续的,因而cache命中率会显然易见地低。如何解决这些问题呢?对于A_value和A_col_index的访存问题,尚可以尝试对其进行数据填充,强制其地址对齐。而对于x的非连续访存问题,如何提高访存效率,这个问题就非常困难了。
4、关于向量化指令的使用。之前在进行gemm和gemv优化中大量地使用了float4这样的向量化访存结构。如何将向量化带到spmv中,这也是一个非常困难的问题。最大的根源是因为每一行的元素不确定,并且本身A中每行的元素就比较少,根本没有那么多数据去喂到LDS128指令上。
5、关于负载均衡的思考。CUDA上的负载均衡问题可以从两个角度考虑,一个是block之间的负载均衡,另一个是block/warp内,不同线程之间的负载均衡。关于spmv的负载均衡问题,可以参考一下Speculative Segmented Sum for Sparse Matrix-Vector Multiplication on Heterogeneous Processors。
四、实验与总结
最后,我们来说一下实验环节。实验主要用来说明两个问题,第一个是THREADS_PER_VECTOR参数对性能的影响,第二个是与cusparse的对比,用以观察不同数据下的性能表现。
实验一,从佛罗里达矩阵库里面选了一个稀疏矩阵,shyy41。平均一行有4.2个元素。我们在不同的参数下进行了实验,其结果如下:
| THREADS_PER_VECTOR | spmv kernel耗时(ns) |
|---|---|
| 2 | 4093 |
| 4 | 3969 |
| 8 | 4066 |
| 16 | 4368 |
| 32 | 4976 |
这个结果和预期的差不多,因为平均一行元素个数是4.2,所以THREADS_PER_VECTOR参数取4或8会有更好的性能表现。
实验二,从佛罗里达矩阵库里面随机选取了一些矩阵,其稀疏特性如下,矩阵旁边有x-y-z标识。x和y代表矩阵的行数和列数,z代表矩阵中的非零元个数。
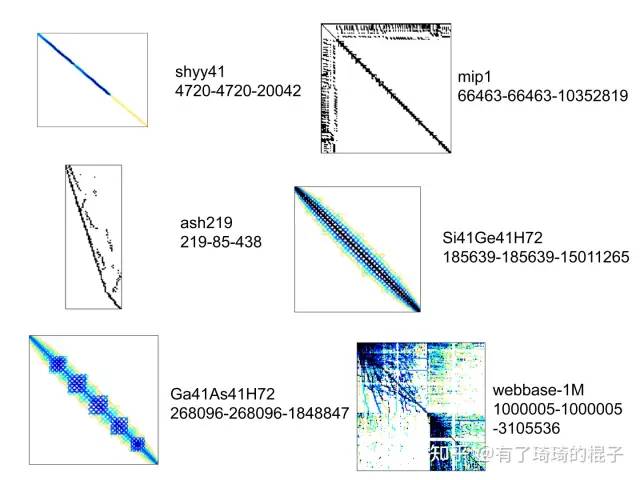
稀疏矩阵
性能表现如下,
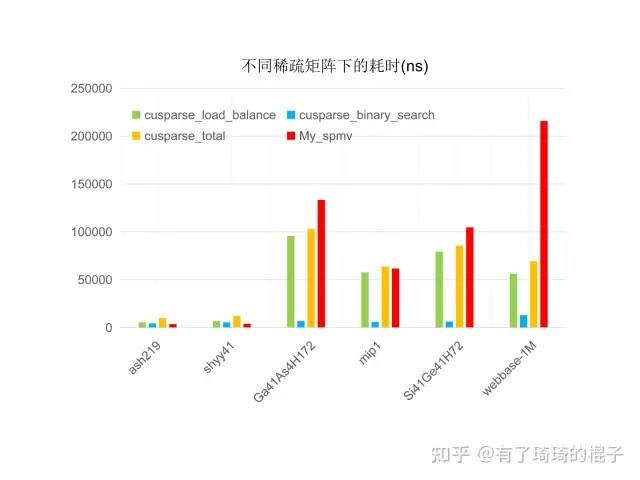
与cusparse的性能对比
结论:
1、先单独看cusparse的表现,库里面会调用两个kernel,分别是binary_seach和load_balance。这个名称简写了。总之,就是cusparse不管来的数据是啥,都会进行负载均衡,在数据量比较多的时候,额外的开销比较少,能够取到足够的效益。
2、如果是结构化的网格,即元素聚集在对角线附近,且每行的非零元都差不了太多的时候,我写的spmv会比cusparse快一些。如果每行的非零元方差特别大,cusparse中的负载均衡工作就发挥了威力,在web网络这种矩阵上能够比我的spmv快2-3倍。总之,在sparse问题中,负载均衡非常重要,我会在下一篇博文中说明如何在spmm中进行负载均衡。
总之,我们实现了spmv kernel,并对主要的优化技巧进行了解析和说明,然后大概地说了一下在spmv上需要注意的问题。通过实验评估了不同参数对性能的影响以及在不同的稀疏矩阵下同cusparse进行了比较,在部分矩阵上性能能够超越cusparse。但由于没有考虑负载均衡,在非均匀网格上,与cusparse有一定的差距。
-
数据
+关注
关注
8文章
7045浏览量
89061 -
存储
+关注
关注
13文章
4316浏览量
85861 -
模型
+关注
关注
1文章
3247浏览量
48854 -
澎峰科技
+关注
关注
0文章
55浏览量
3170
原文标题:深入浅出GPU优化系列:spmv优化
文章出处:【微信号:perfxlab,微信公众号:perfxlab】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
《MATLAB优化算法案例分析与应用》
粒子群算法城镇能源优化调度问题
多目标优化算法有哪些
如何改进和优化RSA算法
如何优化控制算法的代码
智能电网定价的光学优化算法
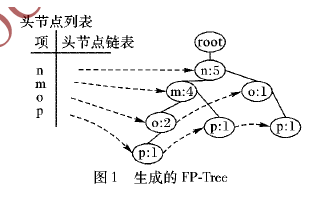
如何使用Spark进行并行FP-Growth算法优化及实现
如何进行耦合数据的融合算法的分解优化
如何使用混合果蝇优化算法进行现场服务调度问题的解决方法





 工商网监
工商网监
评论