 gemv优化总结
gemv优化总结
有朋友来信说:
1. “除了以NVIDIA(英伟达)为例,能不能谈点国产GPU优化的经验分享?”
2. “老讲国外的东西,你们能不能支持一下国产CPU和加速卡?“
这里解释一下原因:
1. N卡的资料和环境大家都比较好找,对于学习GPU并行优化编程的朋友比较友善。
2. 暂时受限于商业保密,我们相信后续会逐步开放起来,学习的平台和环境也容易找到。到时就可以分享一些国产CPU和加速卡的优化经验出来。
------ 正文分割线 ------
本文主要是介绍如何对gemv算法进行优化。gemv,即矩阵向量乘,即计算一个矩阵A与一个向量x的乘积,这是并行计算中的经典话题。个人感觉,gemv的优化核心是需要考虑不同shape的情况,然后针对型地进行优化。本篇文章会先介绍一下针对不同shape设计不同的并行算法,然后说明一下优化思路和相关优化技巧,最后说一下实验效果,在A矩阵列数为16 128的时候,我写的gemv能拥有超越cublas的性能表现。
一、前言
首先介绍一下gemv算法。给定矩阵A和向量x,gemv需要计算两者的乘积,示意图如下:
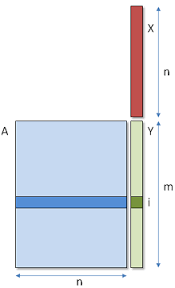
gemv
二、针对不同shape的并行算法设计
这次讲到并行算法设计,什么叫并行算法设计。每个人的理解都不太一样,在GPU中,我的理解就是:设计block和thread的workload,说白了就是要搞清楚一个block负责哪部分的计算,一个thread要负责哪部分的计算。而设计的原则就是尽可能地减少访存,提高数据的复用概率,然后让所有的处理器都满负荷地进行工作,不能浪费。
2.1 针对n=32
对于n=32的情况,我们将每个block设置为256个线程,4个warp,然后每个warp负责一行元素的计算。每个warp要对x进行访问,然后在warp内部进行一次reduce求和操作。
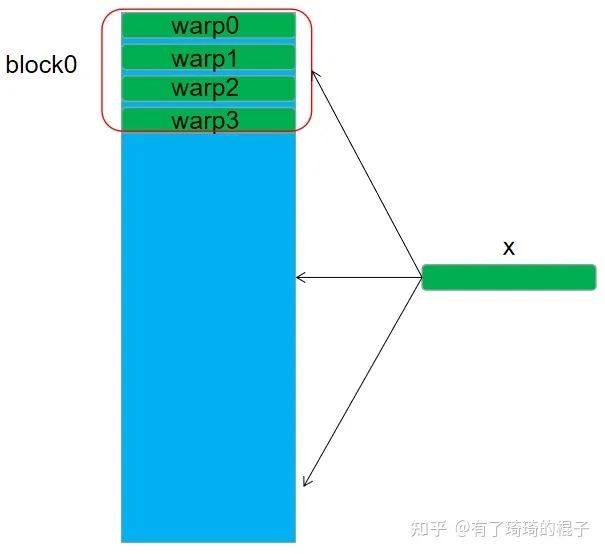
n=32
代码如下:
template__device__ __forceinline__ float warpReduceSum(float sum) { if (WarpSize >= 32)sum += __shfl_down_sync(0xffffffff, sum, 16); // 0-16, 1-17, 2-18, etc. if (WarpSize >= 16)sum += __shfl_down_sync(0xffffffff, sum, 8);// 0-8, 1-9, 2-10, etc. if (WarpSize >= 8)sum += __shfl_down_sync(0xffffffff, sum, 4);// 0-4, 1-5, 2-6, etc. if (WarpSize >= 4)sum += __shfl_down_sync(0xffffffff, sum, 2);// 0-2, 1-3, 4-6, 5-7, etc. if (WarpSize >= 2)sum += __shfl_down_sync(0xffffffff, sum, 1);// 0-1, 2-3, 4-5, etc. return sum; } // if N == 32 __global__ void Sgemv_v0( float * __restrict__ A, float * __restrict__ x, float * __restrict__ y, const int M, const int N) { // Block index int bx = blockIdx.x; // Thread index int tx = threadIdx.x; int ty = threadIdx.y; const int warp_size=32; int laneId= tx % warp_size; int current_row = blockDim.y * bx + ty; if(current_row < M){ float res=0; int kIteration = N/warp_size; if(kIteration==0) kIteration=1; #pragma unroll for(int i=0; i< kIteration; i++){ int current_col = i*warp_size + laneId; res += A[current_row*N + current_col] * x[current_col]; } res = warpReduceSum (res); if(laneId==0) y[current_row]=res; } }
2.2 针对n=128
对于n=128的情况,同样让warp负责一行元素的计算,但是因为每行的元素比较多,所以采用了float4进行向量化的访存。能够有更高的访存效率。
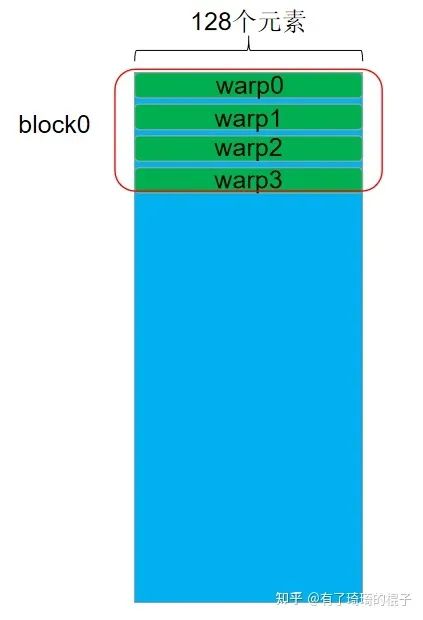
n=128
代码如下:
template__device__ __forceinline__ float warpReduceSum(float sum) { if (WarpSize >= 32)sum += __shfl_down_sync(0xffffffff, sum, 16); // 0-16, 1-17, 2-18, etc. if (WarpSize >= 16)sum += __shfl_down_sync(0xffffffff, sum, 8);// 0-8, 1-9, 2-10, etc. if (WarpSize >= 8)sum += __shfl_down_sync(0xffffffff, sum, 4);// 0-4, 1-5, 2-6, etc. if (WarpSize >= 4)sum += __shfl_down_sync(0xffffffff, sum, 2);// 0-2, 1-3, 4-6, 5-7, etc. if (WarpSize >= 2)sum += __shfl_down_sync(0xffffffff, sum, 1);// 0-1, 2-3, 4-5, etc. return sum; } // if N>= 128 __global__ void Sgemv_v1( float * __restrict__ A, float * __restrict__ x, float * __restrict__ y, const int M, const int N) { // Block index int bx = blockIdx.x; // Thread index int tx = threadIdx.x; int ty = threadIdx.y; const int warp_size=32; int laneId= tx % warp_size; int current_row = blockDim.y * bx + ty; if(current_row < M){ float res=0; int kIteration = (N/warp_size)/4; if(kIteration==0) kIteration=1; A = &A[current_row*N]; #pragma unroll for(int i=0; i< kIteration; i++){ int current_col_vec = (i*warp_size + laneId); float4 current_val= reinterpret_cast (A)[current_col_vec]; float4 current_x = reinterpret_cast (x)[current_col_vec]; res += current_val.x*current_x.x; res += current_val.y*current_x.y; res += current_val.z*current_x.z; res += current_val.w*current_x.w; } res = warpReduceSum (res); if(laneId==0) y[current_row]=res; } }
2.3 针对n=16
对于n=16的情况,让一个warp负责两行元素的计算。以warp0为例,0-15号线程负责第0行元素的计算,而16-31号线程负责第1行元素的计算。
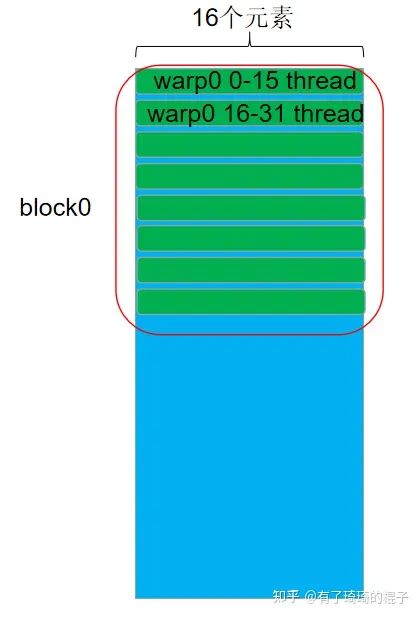
n=16
代码如下:
template__device__ __forceinline__ float warpReduceSum(float sum) { if (WarpSize >= 32)sum += __shfl_down_sync(0xffffffff, sum, 16); // 0-16, 1-17, 2-18, etc. if (WarpSize >= 16)sum += __shfl_down_sync(0xffffffff, sum, 8);// 0-8, 1-9, 2-10, etc. if (WarpSize >= 8)sum += __shfl_down_sync(0xffffffff, sum, 4);// 0-4, 1-5, 2-6, etc. if (WarpSize >= 4)sum += __shfl_down_sync(0xffffffff, sum, 2);// 0-2, 1-3, 4-6, 5-7, etc. if (WarpSize >= 2)sum += __shfl_down_sync(0xffffffff, sum, 1);// 0-1, 2-3, 4-5, etc. return sum; } // if N <= 16 template < const int ROW_PER_WARP > __global__ void Sgemv_v2( float * __restrict__ A, float * __restrict__ x, float * __restrict__ y, const int M, const int N) { // Block index int bx = blockIdx.x; // Thread index int tx = threadIdx.x; int ty = threadIdx.y; const int warp_size=32; int laneId= tx % warp_size; int current_warp_row = (blockDim.y * bx + ty) * ROW_PER_WARP; const int kWarp_size = warp_size / ROW_PER_WARP; int kLaneId = laneId % kWarp_size; int current_thread_row = current_warp_row + laneId / kWarp_size; if(current_thread_row < M){ float res=0; int current_col = kLaneId; res += A[current_thread_row * N + current_col] * x[current_col]; res = warpReduceSum (res); if(kLaneId==0) y[current_thread_row]=res; } }
三、优化思路:
上一节说明了如何针对不同维度的n进行优化,这一节说明一下为什么要这么设计,以及这样的设计方式能够带来什么样的好处。主要考虑的因素有两个,如下:
3.1 尽可能地让warp中的32个线程忙碌
这个主要是针对n<32的情况,例如n=16,如果使用一个warp来负责一行元素的计算,那么warp中有一半的元素都是浪费的。所以让一个warp来负责多行元素的计算,这样让32个线程全部忙碌起来。
3.2 尽可能地提高访存效率
① global mem->register
将数据从global memory搬运到寄存器上时,最重要的就是考虑是不是进行了合并访存。在这里,我们只考虑矩阵数据在global mem中是地址对齐的,即n是2的多次幂。上述的三种并行实现中,warp中的32个线程都是连续地访问32个float或者128个float,因而满足了合并访存的条件,确保了global -> register的访存效率。
② shared mem->register
说到这里,可能会有读者好奇,上述的代码都没有用到shared mem。为啥要说这个点。我们可以再仔细看看上述的三种并行实现,以第2种为例,一个block中有4个warp,每个warp都需要对x进行一次global上的访存,所以一个block有4次访存。如果将x存储到shared mem中,4个warp都去访问shared mem上的x,这样的话,对于global的访存就从4次变成1次。直观上会有性能提升,但不幸的是,如果用shared mem的话,将global mem的数据搬运至shared mem需要有同步操作,这又会导致性能的下降。总的来说,使用shared mem并没有得到显著的提升,不过还是在这里说明一下。
③ 向量化访存
向量化访存就是一个老生常谈的话题了,说白了就是尽可能地使用128bit的访存指令,这个在reduce、sgemm、elementwise专题上说了很多,就不再多说。
四、实验与总结
笔者在V100上进行了实验,迭代1000次,用nsight进行了测试,性能数据如下:
| sgemv | M | N | my_sgemv time(ns) | cublas(ns) | my_sgemv/cublas |
|---|---|---|---|---|---|
| v0 | 16384 | 32 | 10341 | 8386 | 81.1% |
| v1 | 16384 | 128 | 14284 | 15848 | 110.9% |
| v2 | 16384 | 16 | 6903 | 7576 | 109.7% |
可以看出,在n=16以及n=128的情况下,都比cublas性能要好。n=32的情况要差于cublas。如果再加上向量化访存应该能够有更好的性能表现。由于我实在没时间再进行深入,有心的同学可以改改代码看看效果 :)。
-
cpu
+关注
关注
68文章
10816浏览量
210980 -
存储
+关注
关注
13文章
4245浏览量
85623 -
编程
+关注
关注
88文章
3578浏览量
93551 -
澎峰科技
+关注
关注
0文章
49浏览量
3158
原文标题:深入浅出GPU优化系列:gemv优化
文章出处:【微信号:perfxlab,微信公众号:perfxlab】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
HBase性能优化方法总结
改善深层神经网络--超参数优化、batch正则化和程序框架 学习总结
文档基于DSP的视频监控系统的优化仿真的设计总结文档
总结下电机控制中对程序算法优化的办法
电机控制中对程序算法优化的办法总结
GPRS优化思路总结报告

区块链共识算法的效能优化研究及总结
DC-DC电源系统的优化设计总结

接口优化的常见方案实战总结
深入浅出GPU优化系列:gemv优化

总结FasterTransformer Encoder优化技巧





 工商网监
工商网监
评论