 原理解析:IPM弱磁控制和基于模型的标定
原理解析:IPM弱磁控制和基于模型的标定
什么是IPM的弱磁控制
IPM(Interior Permanent Magnet,内嵌式)电机是永磁同步电机(PMSM,Permanent Magnet Synchronous Machine)的一种。它具有功率密度高、功率因数高、调速范围宽等优点, 被广泛应用于新能源汽车中。
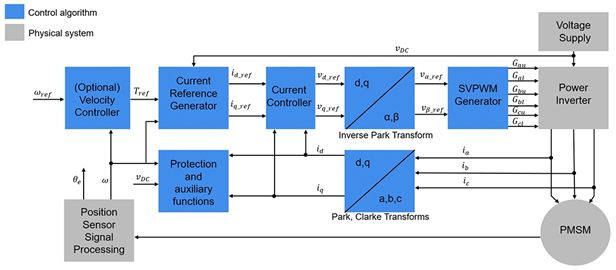
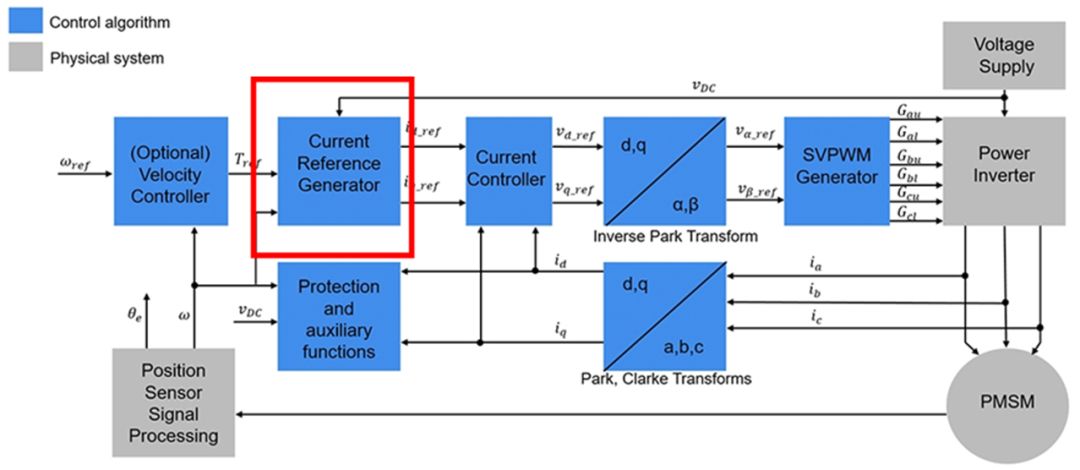
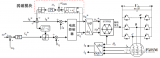
PMSM 一般是通过 FOC(Field Oriented Control)进行控制。FOC 的核心思想就是通过 Clarke/Park 变换,将静止的三相交流电 abc 坐标系,转换到旋转的 dq 坐标系。然后通过对 Id、Iq 的控制,达到调节电机力矩的目的,其中反馈量为三相电流和电机转子位置。通过增加速度控制反馈环,可以对速度进行控制。下图为 Simulink 中的 SimElectrical 自带一个 FOC 的例子。
电机的永磁体转子,在电磁作用的影响下,旋转产生反电动势(back EMF)。当转速达到一定程度(通常叫基速),加载在定子的反电动势足以抵消施加的正向电压。由于永磁体的 MMF(Magneto-Motive Force)是一个定值,只能改变 Id 和 Iq,使定子产生的 MMF 去抵消一部分永磁体产生的 MMF,从而总的气隙 flux 被减小了(weaken)。因而,叫弱磁(flux weakening)。这样转子产生在定子上的反电动势也会被减小,从而可以产生力矩,维持高速。
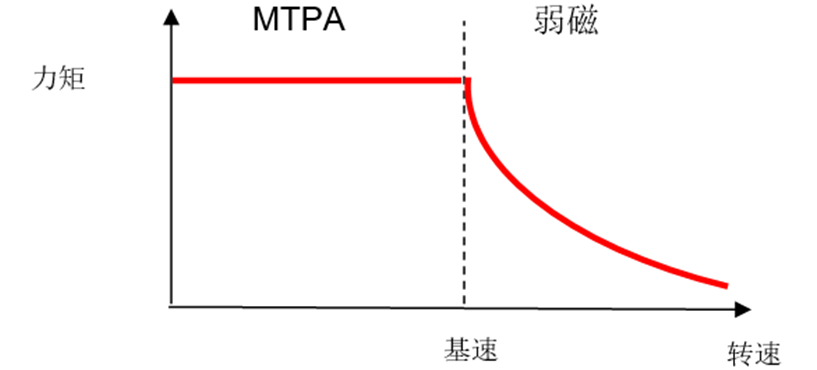
PMSM 电机在基速以下的运行区域叫 MTPA 控制区域(Maximum Torque Per Amp)。在基速以上的区域叫弱磁控制区域。弱磁控制的本质是用牺牲电流--力矩的转换效率来换取高速运行。
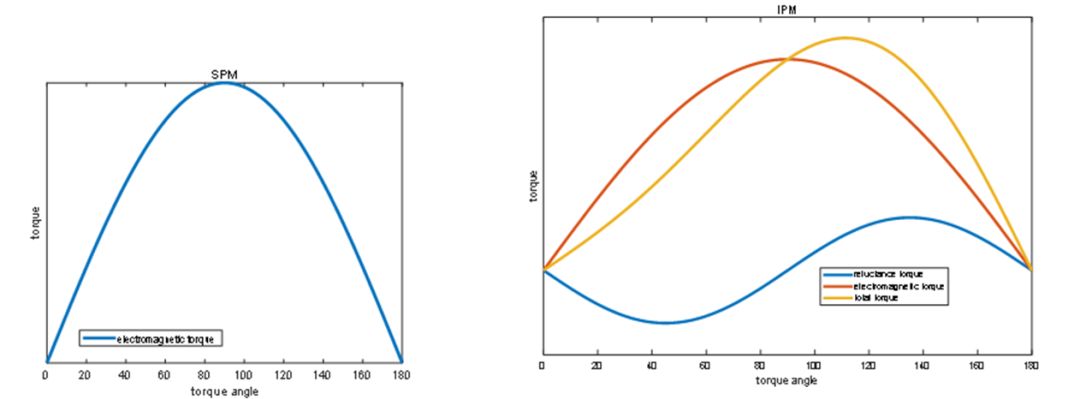
IPM 电机是 PMSM 的一种,它的控制要比另外一种 PMSM,即 SPM(Surface Mounted Permanent Magnet)要复杂。其原因就在于它们的区别:SPM 将磁钢贴在转子表面,而 IPM 将磁钢嵌至转子内部。SPM 只有一种力矩,electromagnetic torque(电磁力矩);IPM 有两种力矩:electromagnetic torque(电磁力矩)和 reluctant torque(磁阻力矩),IPM 的总力矩是电磁力矩和磁阻力矩的和。
为了更好地研究 IPM 的控制,一般会利用数学的方法将电机的电流限制圆、电压限制椭圆、等力矩线在 Id 和 Iq 的平面空间画出(图片来源:Lei Zhu):
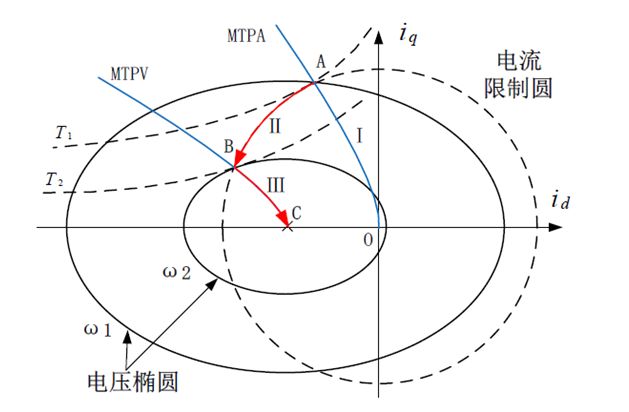
电流限制圆为虚线,椭圆为电压限制椭圆。随着电机转速的增高,电压椭圆会向内收缩。图中蓝色线段表示 MTPA 线,线条 AB 表示电流限制圆在弱磁区域的部分,线条 BC 是等力矩线和电压椭圆的切线点之连线。弱磁控制的问题就在于,如何选取合适的 Id/Iq 组合,这些组合会落在蓝色线条和红色线条合夹的区域之内。
基于 Flux Amplitude 的查表法
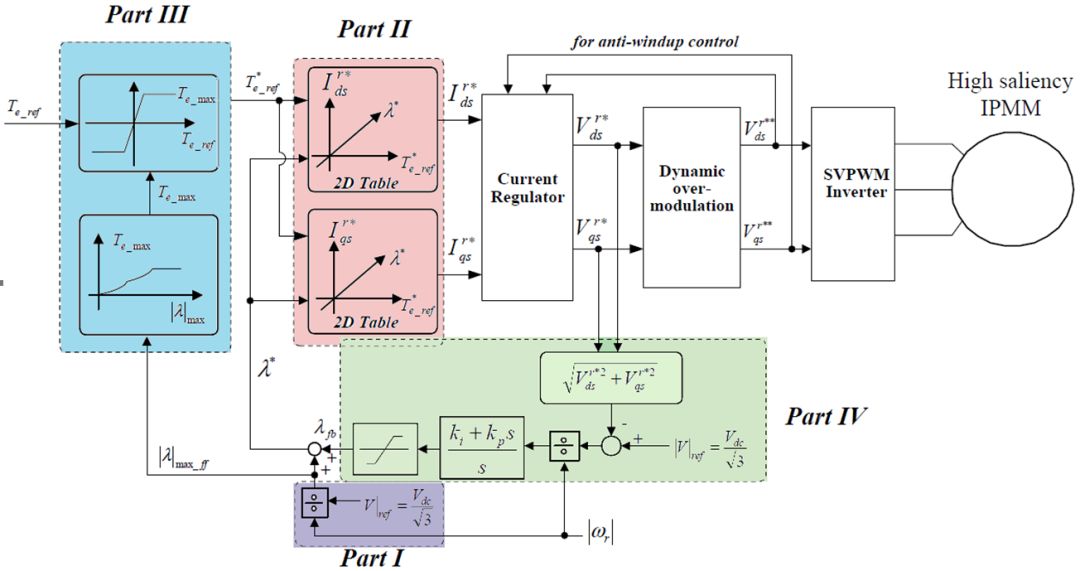
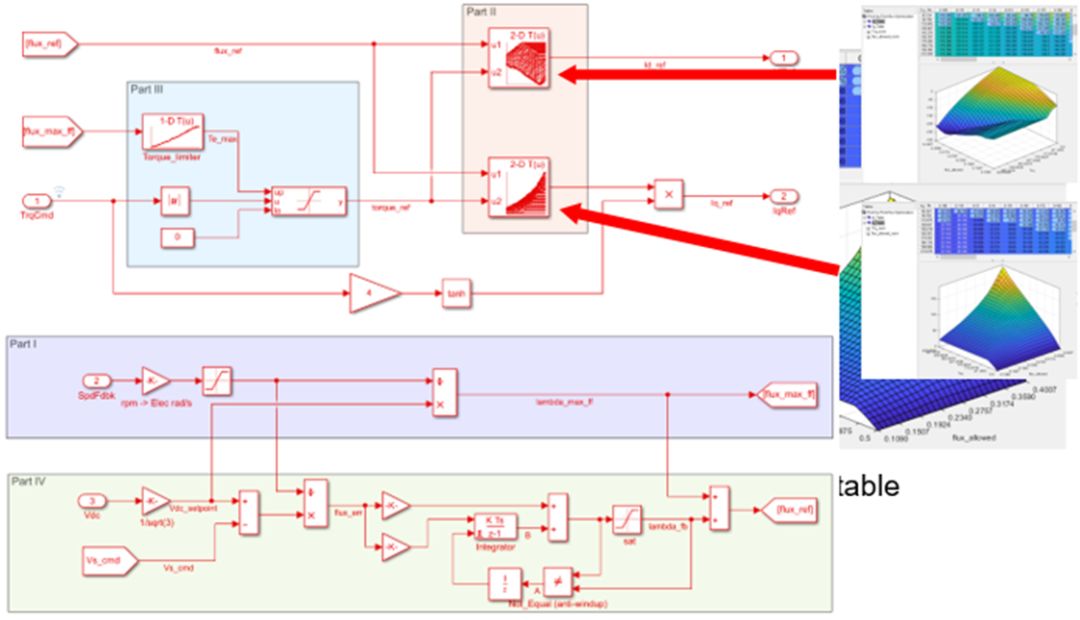
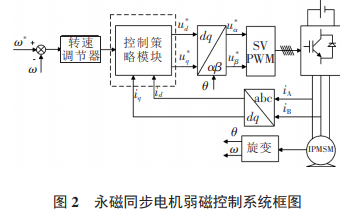
多年来,电机控制研究人员提出很多种弱磁控制算法,例如公式法、电压调节法、查表法等等。不管实现的方法如何,都是在输入转速和力矩的情况下找到一个 Id、Iq 最佳组合。我们称为电机弱磁表格标定。在下图的控制 FOC 控制框图示例中,其中红色区域就是电机弱磁表格的所在位置。它的输入信息为力矩命令、转速反馈和逆变器母线电压,输出为 Id、Iq 组合。
在新能源汽车电机业界,弱磁表格标定比较常用的是查表法。其中又可细分为:基于单电压下的转速和力矩的表格查表法,基于多电压下的转速和力矩表格的查表法,基于磁链(flux amplitude)和力矩的查表法等等。其中基于 flux amplitude 和力矩的查表法备受关注。引用的较多的论文是下面的这篇文章,出自GM:
图片来源:Bon-Ho Bae, Patel N., Schulz, S., Seung-Ki Sul , “New Field Weakening Technique for High Saliency Interior Permanent Magnet Motor”
电动汽车粗分混合动力和纯电动。一般来说,纯电动汽车在动力电池和电机逆变器母线电压之间没有DC/DC(直流电压转换器)。纯电动车在长时间行驶后,会出现电池 SOC(State of Charge)下降,从而引起输出电压的下降。
让我们用 Simulink 的 Powertrain Blockset 做一下仿真:这是一个纯电动车的控制模型,其中用 US06 驾驶循环做为工况。
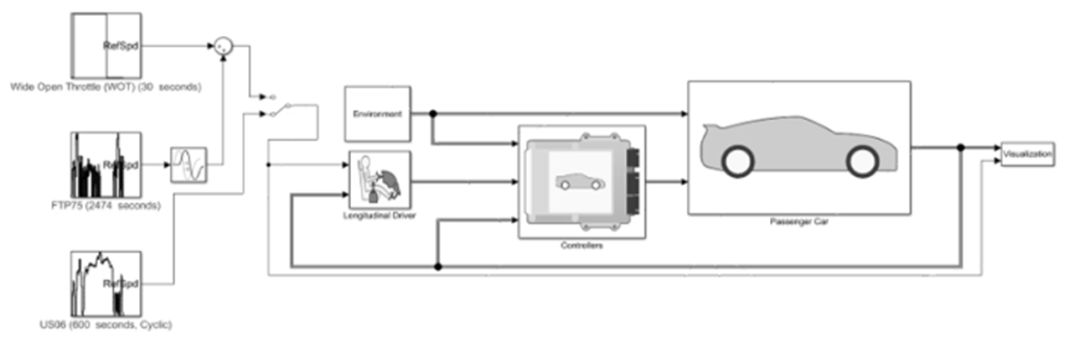
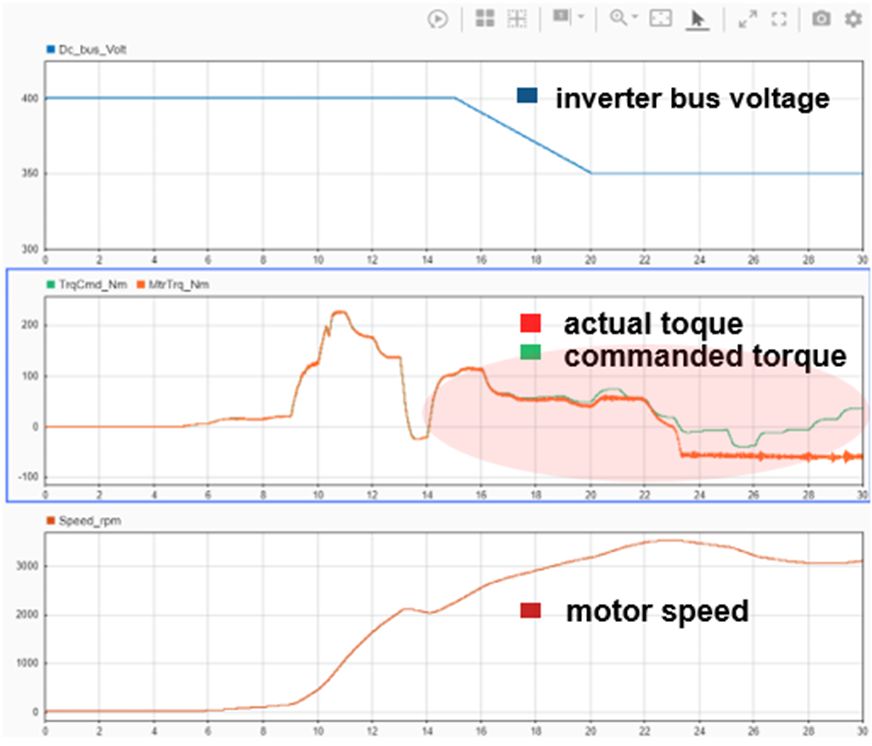
从仿真结果来看,在逆变器母线电压下降后(从 400V 到 350V),电机力矩会变得失控。
让我们回到 GM 的那篇论文,论文提出了用 Flux Amplitude 这个中间变量来代替转速,结合力矩,作为查表的输入。这样做的好处是,Flux Amplitude(转速)这个中间变量(part II)带有转速和电压的信息,可以反映电压变化的影响。另外,实际的电压可以作为反馈用来调节查表的输入 Flux Amplitude (part IV)。
Model Based Calibration
GM 的这篇论文已经在国内外的新能源电机控制厂家广泛使用。通常来说,电机弱磁表格标定会和 MTPA 标定放在同一个 LUT(look-up table)里。标定开发人员,往往需要通过台架(dyno)测试数据,结合MATLAB(或者其他编程语言)脚本,利用一些搜索规则,找到弱磁和 MTPA 的 LUT 点。
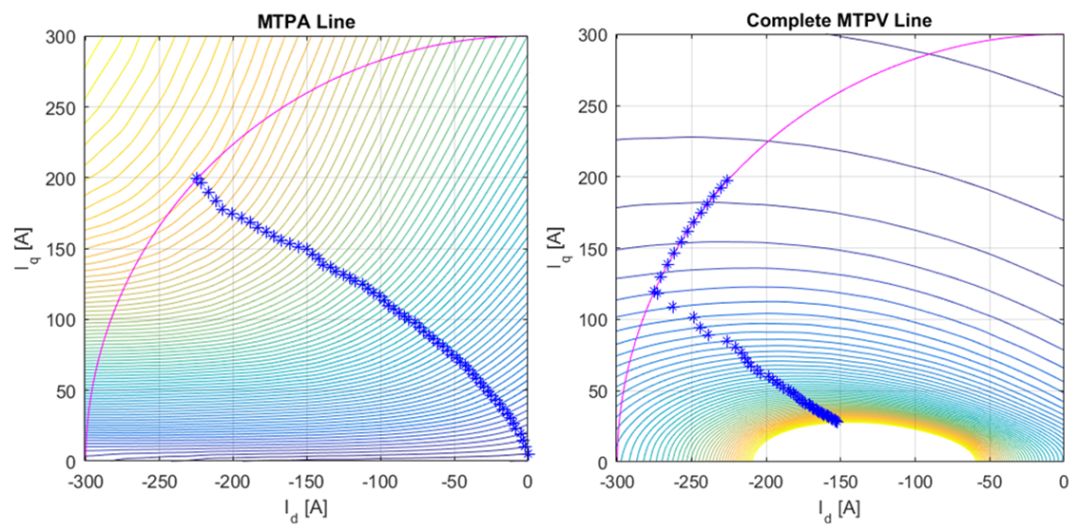
例如:
先找出 MTPA line 上的点,见上左图
再找出电流圆和 MTPV 上的点,见上右图
之后,分多种情况寻找弱磁区域中的 LUT 点。
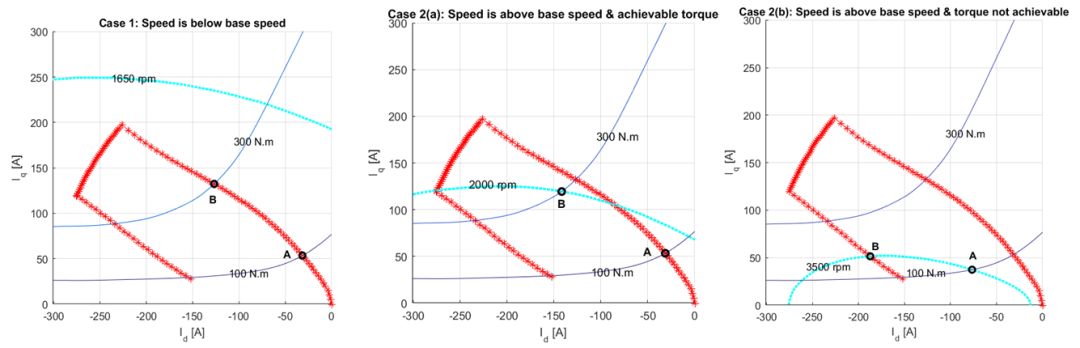
例如:
电机转速在基速以下,直接将等力矩线和 MTPA 的交点作为 LUT 点。上左图的 B 点和 A 点。
电机转速超过基速,进入弱磁区域。如果等力矩线和电压椭圆(等转速线)有交点,将此交点作为 LUT 点。上中图的 B 点。
电机转速超过基速,进入弱磁区域。如果此时等力矩线和电压椭圆(等转速线)没有交点,说明在此转速下的要求力矩无法达到。则退而求其次,将该等转速线和 MTPV 线的交点作为 LUT 点,此时实际力矩为上右图的 B 点,实际力矩小于要求的力矩。
根据经验,这些 LUT 点的标定需要花费大量的时间编写脚本。并且,在电机特性变化的时候,更改脚本比较麻烦,很难做到较好的可移植性。
MBC(Model Based Calibration)工具箱,是大约 10 年 MathWorks 为燃油发动机开发的标定工具箱。它也可以方便地做电机弱磁表格的标定工作。标定工作基本可以分为四个步骤:
Data Collection - Data Modelling - Calibration - Implementation
通过这四个步骤,可以实现自动化标定。
1. Data Collection(数据收集)
数据收集是标定的第一步。电机数据的来源既可以是 FEA(有限元分析)和实际台架的测试数据。
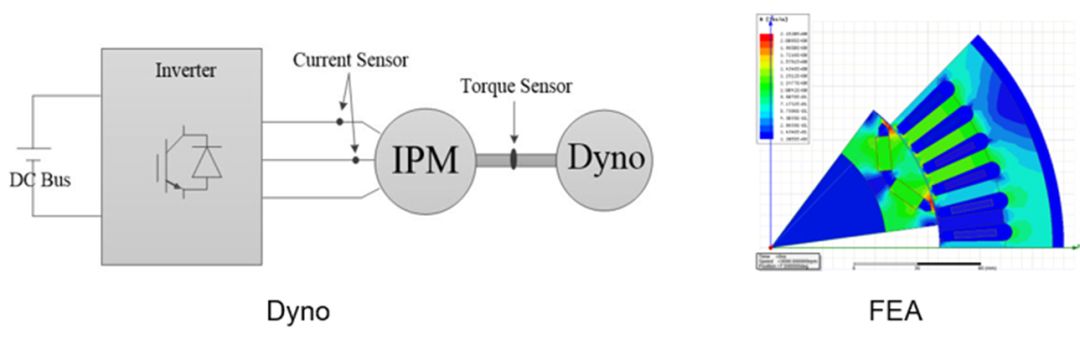
不管是哪种方式,收集数据的方式都很类似:在不同的电流运行点(Id/Iq)组合,记录 flux 和 torque 数据。
2. Data Modelling (数据建模)
为什么要做数据建模?数据建模和电机控制算法或者被控对象建立没有任何关系。
数据建模是将测试到的数据,以某种模型的关系进行拟合,例如:
高斯过程模型
多项式
数据建模的必要性体现在:
消除数据噪声:有了数据模型,可以消除明显不合理的数据和干扰。
数据插值:有一些工况条件如果没有测试到,通过数据模型可以进行插值。
利用优化算法:对被拟合的数据进行优化算法计算要比对一堆离散的数据进行优化算法计算要快得多。
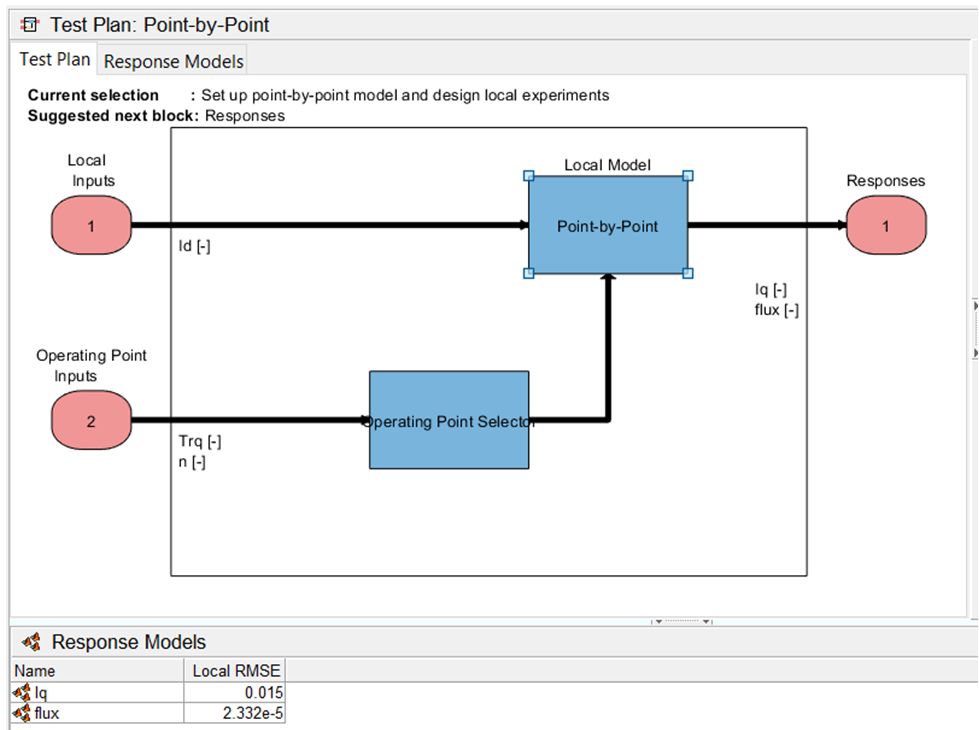
在基于 flux amplitude 的弱磁表格标定过程中,用 Id 作为输入,输出为 Iq 和 flux。Torque 和转速作为 operating points。有多少个 operating points 就会有多少个数据模型。这里并不意味着,Id 和 Iq/flux 之间有任何的物理关系,只是纯粹的数据处理。
3. Calibration(标定)
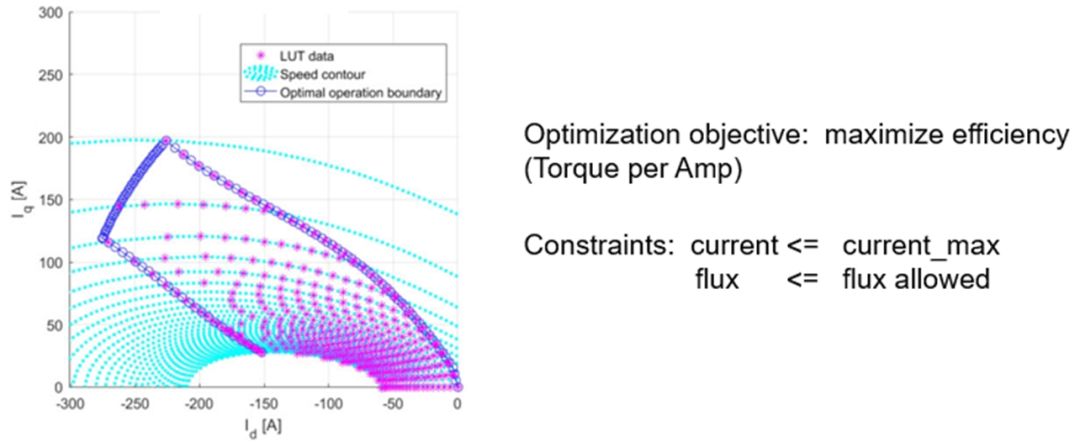
在有了数据模型后,可以进行标定工作。实际上,这一步会用不同的优化算法去尝试对优化目标进行优化。这里将电流利用率最大作为目标,同时有两个优化限制条件:
1)电流限制;
2)flux amplitude 限制——从电压限制和速度计算得到。
有了这些优化目标和限制条件,可以利用 MBC 强大的功能进行自动优化,让我们看一下工具的动画:
4. Implementation (实现)
最终标定出来的 LUT,被放进了 FOC 算法中,通过 Embedded Coder 可以直接产生 C 代码。
MathWorks 技术服务
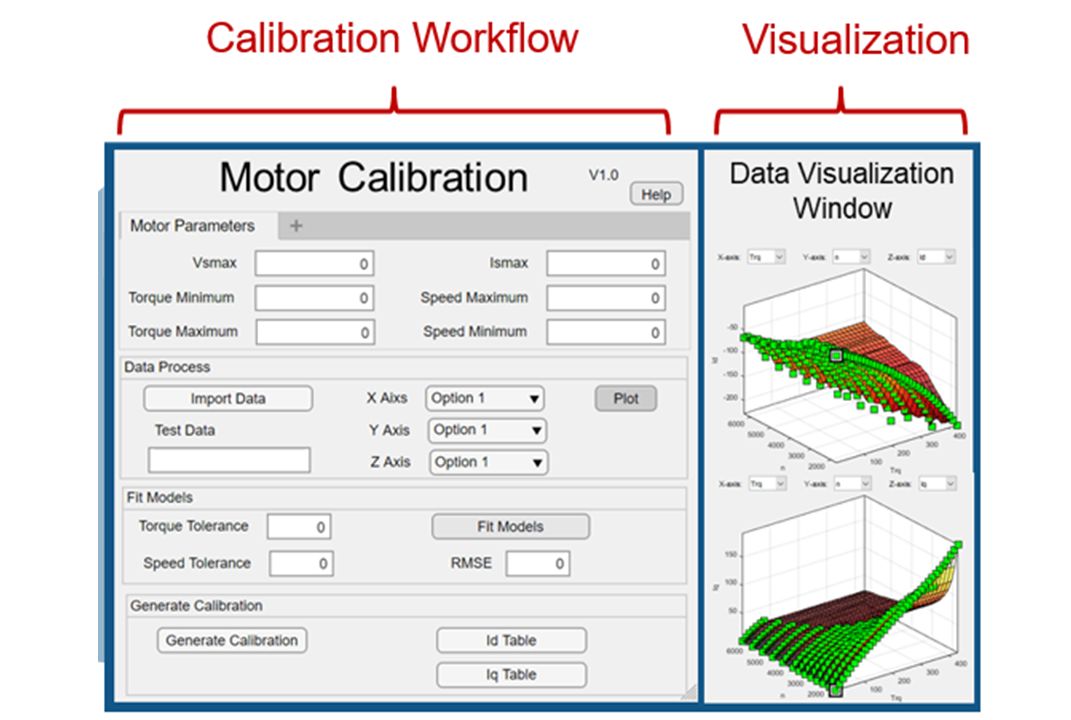
MathWorks 技术服务团队为了使对 MBC 工具箱不熟悉的人,也可以快速进行电机弱磁表格标定,开发了一套自动化的 GUI 界面。并且可以做如下技术咨询服务:
进行电机标定 DOE(Design Of Experiments)设计
电机标定流程实现和 GUI 定制
用户无需了解 MBC 的内部运作机理,即可进行方便、快速、可移植性强的电机弱磁表格标定。
审核编辑:汤梓红
-
永磁同步电机
+关注
关注
28文章
874浏览量
49723 -
模型
+关注
关注
1文章
3383浏览量
49335 -
IPM
+关注
关注
5文章
163浏览量
39047 -
PMSM
+关注
关注
14文章
246浏览量
42039 -
弱磁控制
+关注
关注
2文章
18浏览量
10479
原文标题:原理解析 | IPM 弱磁控制和基于模型的标定(文末有彩蛋)
文章出处:【微信号:西莫电机论坛,微信公众号:西莫电机论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于电压反馈的永磁同步电机弱磁控制分析
电机弱磁时的电流大小关系?
资料分享:《新能源汽车新型电机的设计及弱磁控制》
计算法的弱磁

电动汽车如何使用永磁同步电机弱磁控制的详细资料免费下载
永磁同步电机的矢量控制策略之弱磁控制(超前角)






 工商网监
工商网监
评论