 用于位置跟踪应用的RAIN RFID
用于位置跟踪应用的RAIN RFID
RAIN射频识别技术长期以来一直用于位置跟踪应用。但是,围绕物联网的炒作为探索RAIN RFID作为定位技术的适用性的公司提供了新的推动力。在最近的物联网贸易展上, 我们的团队已经就使用 RFID 作为室内定位进行了多次讨论 (RTLS – 实时定位系统) 技术.
基于读取器的位置
建立项目位置的最常见方法是将其基于读者。当您具有固定读取器并且知道读取器的位置时,可以根据报告标记的读取器确定标记项目的大致位置。项目的位置将在设置的读取器区域内。对于许多应用,这种方法都有效,例如在体育比赛计时应用中。阅读器也可以放置在门口以检测进出的运动,从而提供房间级别的位置。
基于标记的位置
基于读取器的定位的反向方法是将标签放在固定位置,并根据固定标签位置跟踪读取器位置。这种方法的好处是标签很便宜。沿着已知路径放置许多标签是可行的,例如,在电梯、火车、输送机、地砖等中。当读者经过并“看到”一个标签时,这就是你在地图上放置它的位置。
查找正确的项目
查找特定项目的位置(某物的位置)是一个非常常见的用例。例如,在仓库中查找正确的零件或在大型存档中查找正确的文件。市场上有助于此应用的新产品是LED标签。为了查找项目,手持式阅读器会向它要查找的项目发送 select 命令。当阅读器“找到”它正在寻找的项目时,标签上的 LED 会亮起,以在视觉上帮助用户找到该项目。
另一种方法是使用带有手持阅读器的“盖革模式”。可以将读取器设置为在读取器靠近或远离感兴趣的项目时显示“变暖或变冷”指示。当物品靠近时,通常会更频繁地使用声音指示哔哔声——因此该方法通常被标记为“盖革计数器”。
参考位置标签
另一种好的常用定位方法是将参考标签放置在存放物品的固定位置,例如在架子和桌子上、房间和门口。当您使用手持阅读器进行盘点时,除了物品上的标签外,您还会读取参考标签,并可以根据已知的参考标签位置确定商品的位置。
相控阵
相控阵是一种相当新的RFID标签定位方法。这项技术已经存在了几十年,主要是在雷达业务中。相控阵是一种天线,由一个天线外壳内的多个小辐射元件组成,其中控制元件的相位差允许发射波束在所需方向上引导。这允许您从不同方向扫描环境以查找标记的项目。
架空双向相控阵读卡器正变得越来越流行。它们允许使用安装在天花板上的单个阅读器估计物品位置,扫描左侧,右侧,背面和正面。当物品很大且房间相当空旷时,头顶阅读器工作得很好。房间内的架子和家具会引起反射和回波,这将对准确性产生影响。
三角测量
使用两个或多个水平壁挂式扫描相控阵读数仪,可以通过三角测量确定位置。如果您知道到物品的角度和距离范围,您还可以使用放置在墙上的一根相控阵天线来确定位置。这种技术仍然很少见,而且相对昂贵。
基于范围的三角测量是一种更传统的方法,其中两个或多个读取器找到项目并可以估计项目与读取器的距离。距离数据可用于计算项目的位置。但是用RFID估计距离并不是那么简单。通常在RF中使用飞行时间,但是由于距离很小,时差太小,无法准确工作。使用 RSSI 也很棘手,因为它只能以一种方式工作。如果你得到一个非常高的RSSI,你知道这个项目非常接近。但是,如果您的RSSI较低,则该物品可以在任何地方,远处或近处。
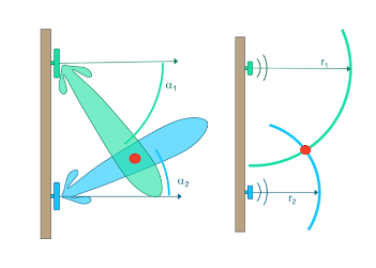
使用基于定向天线的三角测量和基于距离的三角测量来确定位置。
基于相位的测距
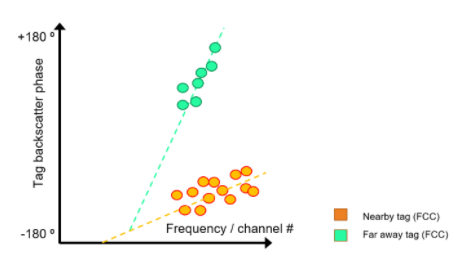
基于相位的测距是一种使用反向散射相位测量的技术。在此方法中,您可以选择一个频道并从标签中获取回复。答复总是在某个阶段出现。当您采用下一个通道或提高频率时,从阅读器到标签并返回的路径中将容纳更多的波长,因此相位将增加。当您转到更高的通道号时,相位会上升(见下图)。相位变化率相对于距离,因此可用于计算标签的距离。如果相位增长很快,则标签很远。如果频率增加时相位增长缓慢,则标签会更近。然而,区域渠道法规给这种方法带来了挑战。
库存机器人
使用库存机器人技术来定位物品还不是很常见,但它可以成为在大型零售店和仓库中进行库存的良好解决方案。机器人的位置可以通过平面图和旋转编码器、激光雷达和其他技术准确跟踪。当机器人不知疲倦地四处漫游时,它的天线可以从其路径上的数百个位置检测标记的物品。在后处理中,可以根据这些数据点计算出项目的准确位置。当项目不移动时,此方法是最佳选择。幸运的是,机器人不介意通宵达旦,允许在夜间完成库存轮次。
审核编辑:郭婷
-
射频识别
+关注
关注
8文章
577浏览量
38975 -
物联网
+关注
关注
2910文章
44778浏览量
374755 -
阅读器
+关注
关注
0文章
302浏览量
27934
发布评论请先 登录
相关推荐
RFID实时跟踪解决方案
基于RFID技术的茶叶质量安全跟踪与追溯
基于RFID的位置感知技术
UHF RAIN RFID标签IC能助力有效地部署RFID行李跟踪系统
英频杰利用RAIN RFID优化医疗行业的库存及资产管理

嵌入式UHF RAIN RFID模块ThingMagic M6e-Nano
RAIN RFID智能模块ThingMagic EL6e
Murata金属UHF RAIN RFID标签的详细介绍
NFC和RAIN RFID提高供应链可见性的十种方式
RAIN RFID标签助力大规模数字化管理
RAIN RFID标签质量测试的最佳实践

使用RAIN RFID标签扩大规模:通往每件物品都有自己的数字身份的世界之路
成功使用RAIN RFID基于持续改进
生产中NFC/RAIN RFID双频标签的测试要求
RAIN RFID将推出RAIN RFID空中接口协议新版本Gen2v3






 工商网监
工商网监
评论