 虚拟轴软件SynchroMove介绍
虚拟轴软件SynchroMove介绍
ProConOS是一款高性能PLC运行时间引擎,专为基于嵌入式和PC的控制应用而设计.
概观
ProConOS是一款高性能PLC运行时间引擎,专为基于嵌入式和PC的控制应用而设计。ProConOS已经在驱动系统,RTU,机器人控制器和PLC上安装了超过25万台(是的,甚至有几家PLC制造商使用ProConOS作为他们的控制引擎!)那么,为什么全球的控制器制造商都依赖于ProConOS?性能无与伦比,易于集成和可靠性。
抢先式多任务架构可提高您的灵活性
ProConOS最多支持16个独立,循环或事件触发的优先任务任务。每个任务具有不同的优先级,并以不同的间隔时间或扫描速率运行多个IEC程序或功能块。这听起来很多(而且是!),但是,ProConOS经过现场验证的优先级划分方案可确保任务始终运行,直至完成或被更高优先级的任务中断。优先级划分使您可以灵活地将关键控制逻辑放在以非常高的速率(每毫秒)执行的任务中,而不太关键的功能则以完全不同的间隔时间和较低的优先级执行。而不是像大多数PLC那样采用从上到下扫描的单一程序,其中触点用于启用/禁用程序的不同部分,
确定性操作保证 -降至1毫秒
KW Software知道您需要确保您的任务在您计划时运行 - 每次计划运行。这就是为什么ProConOS与流行的实时,多任务操作系统(RTOS)(如VxWorks,QNX,OS 9等)协同工作以确保性能下降到1毫秒的原因。对于Windows NT和DOS等流行的非实时操作系统,KW软件已经编写了实时扩展来提供确定性的性能。
KUKA.PLC ProConOS是一个运行时间系统,工艺程序包 KUKA.PLC Multiprog使用该系统执行机器人控制系统上的 虚拟PLC 应用程序。它拥有标准化句法和语义。ProConOS可通过初始化文件配置并且可灵活地根据机器人控制系统的要求进行调整。
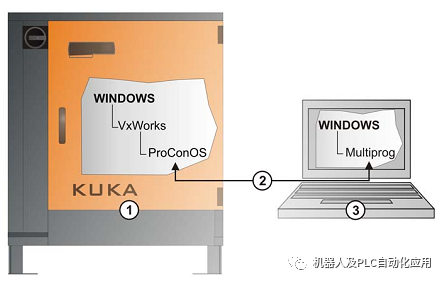
KR C4现在使用3大系统:
1.Windows操作系统.
2.实时操作系统VxWorks.
3.运行时间系统ProConOS.
-
嵌入式
+关注
关注
5087文章
19149浏览量
306231 -
PC
+关注
关注
9文章
2093浏览量
154365 -
软件
+关注
关注
69文章
4973浏览量
87751
原文标题:KUKA.ProConOS软件-虚拟轴软件SynchroMove
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
EShow虚拟仪器测试软件
介绍SSH软件的安装和ssh软件在主机和虚拟机之间传文件
基于虚拟仪器技术的多轴步进电机控制系统

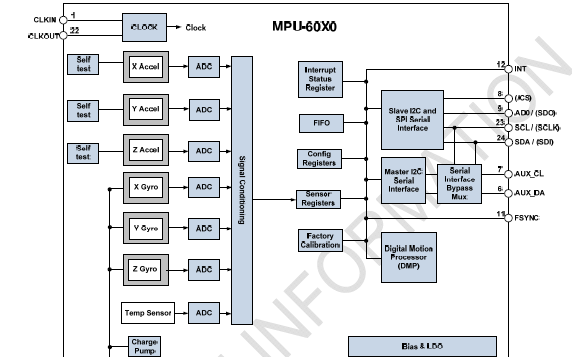
MPU6050高精度6轴惯性导航模块的资料合集免费下载包含六轴绘图软件
简单介绍KUKA外部轴应用






 工商网监
工商网监
评论