 如何通过ABB机器人创建码垛程序
如何通过ABB机器人创建码垛程序
1、什么是码垛?
有规律的移动机器人进行抓取及放置
2、如何简便码垛程序
设置好工件坐标系,工具,对第一个码垛放置点进行示教,xyz方向的间距和个数可设
3、如何创建
创建m_pallet模块
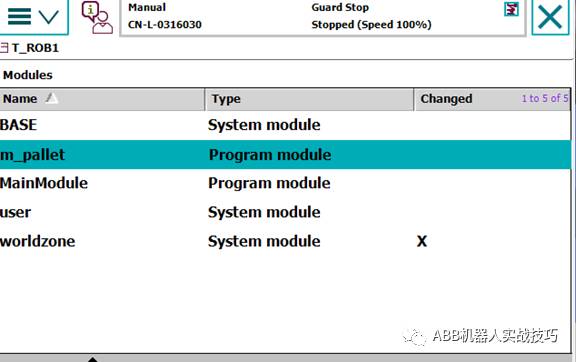
建立两个routine
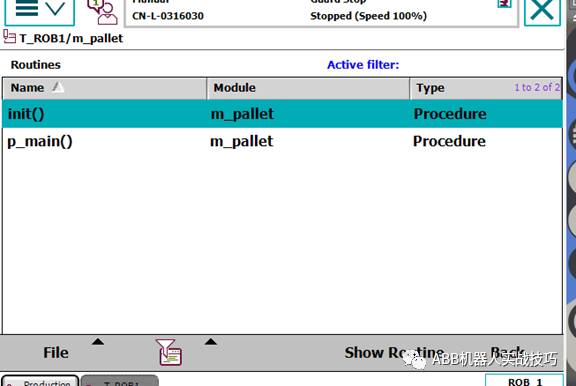
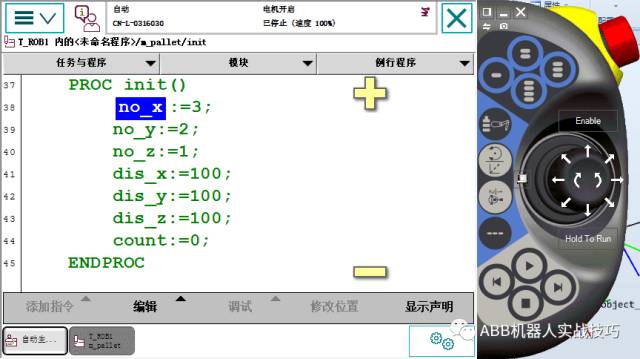
在init 程序里,设置xyz方向个数和各方向间距
在p_main程序里,创建机器人移动到pHome点,pPick位置(抓取位置),以及第一个放置点pPlace_ini
通过三层for循环,进行码垛。实例程序为先x方向,再y方向,再z方向
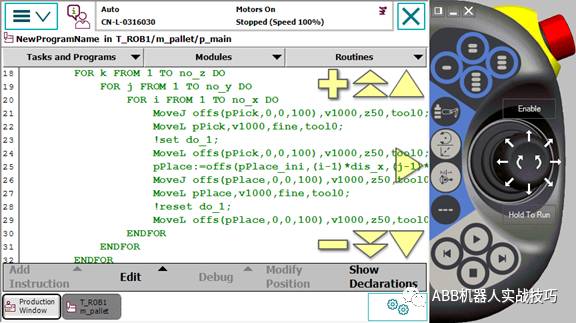
其中偏移如下:
pPlace:=offs(pPlace_ini,(i-1)*dis_x,(j-1)*dis_y,(k-1)*dis_z);
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
ABB机器人
+关注
关注
15文章
88浏览量
13483 -
码垛机器人
+关注
关注
2文章
306浏览量
11418 -
for循环
+关注
关注
0文章
61浏览量
2493
原文标题:【干货】如何通过ABB机器人创建码垛程序
文章出处:【微信号:你身边的机器人专家,微信公众号:你身边的机器人专家】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
码垛机器人夹抓可以实现多少种用途
``力泰科技资讯:码垛机械手作为工业码垛机器人的重要组成部分之一,可根据不同的产品,设计不同类型的机械夹抓,从而让码垛机器人具备效率高、质量
发表于 08-15 09:55
ABB机器人指令模块介绍与开发过程
”的手段,即,仅以名称(非值)赋予的参数。开关型的域为空,没有值能转移给开关型参数。下面通过三则示例演示指令开发。如何实现码垛指令码垛是机器人最常用的功能之一,与其他多数
发表于 10-21 16:36
ABB机器人维修保养指南
运行速度,v_leax表示外加轴线性运行速度,v_reax表示外加轴旋转运行速度,如果没有外加轴则后两个不用修改。④自定义好的数据就可在RAPID程序中进行调用了。为限度地保证ABB机器人正常运行,
发表于 08-19 10:32





 工商网监
工商网监
评论