 RTOS常用的调度算法
RTOS常用的调度算法
从裸机(前后台架构)的软件开发过渡到使用实时操作系统(RTOS)可能是一项困难的工作。 但使用RTOS有许多优势,例如简化应用集成,支持任务抢占调度,当开发人员使用复杂的32位微控制器,且可以获取足够的Flash和RAM空间时,使用RTOS开始变得有意义。 许多32位应用程序需要使用USB、TCP/IP和文件系统,这对于裸机应用程序的开发是非常困难的,且大多数第三方中间件被设计为与RTOS无缝集成。
1
时间片轮询调度
前后台系统实现通常基于轮询调度技术,它是一种很自然的软件编写方式,只需向超级循环中添加新代码,相当于增加了一个新的任务。
RTOS中的轮询调度策略,是允许多个任务可以分配同一个优先级别。调度程序基于时钟监控任务时间,任务处于相关优先级,按照先进先出的原则执行分配到的时间片,时间到了,即使当前任务还没有完成,任务也将CPU时间传递给下一个任务。在下一个分配到的时间段内,该任务将从它停止的位置继续执行。
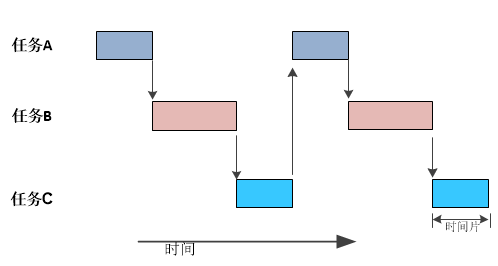
常用的RTOS,如μC/OS-III(Cs/OS3)、FreeRTOS都支持时间片轮询算法。FreeRTOS中每个任务的时间片长度是固定的,为一个时间节拍;而μC/OS-III中每个任务的时间片长度可变,可在任务创建时指定。
2
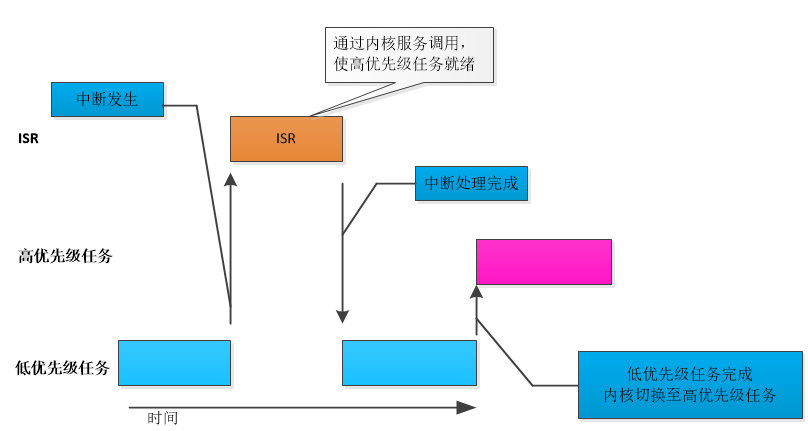
基于优先级的协同调度
在RTOS中,协同调度是基于优先级的非抢占调度方法。任务按优先级排序,并且是事件驱动类型的,一旦正在运行的任务完成,或者任务主动调用OS服务放弃CPU,就绪运行的优先级最高的任务才可以获得CPU使用权。
3
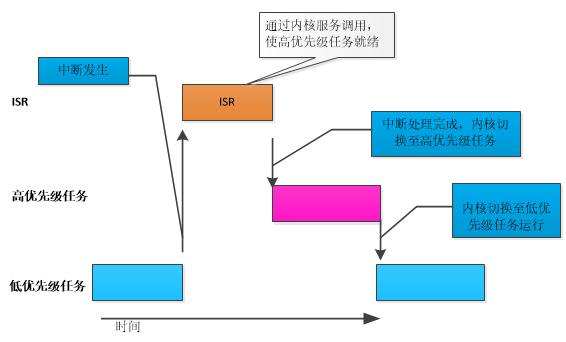
抢占式调度
RTOS通过可抢占调度保证实时性。为了保证任务响应,在抢占调度策略中,只要一个优先级更高的任务就绪,正在运行的任务低优先级任务将被切换出来。通过抢占,正在运行的任务被迫放弃处理器,即使任务工作还没有完成。
 RTOS通常可以配置为使用许多确定性调度算法,以保证满足任务截止时限。如FreeRTOS、μC/OS-III支持抢占和时间片轮询两种调度方法。
RTOS通常可以配置为使用许多确定性调度算法,以保证满足任务截止时限。如FreeRTOS、μC/OS-III支持抢占和时间片轮询两种调度方法。
4
总结
RTOS对于嵌入式软件开发人员来说是一个强大的工具。RTOS应用中,每个任务都有单独的任务控制块,其中包含堆栈、优先级和ID等参数。每个任务都可以被看作是单独的应用程序。RTOS还提供了各种各样的同步和通信工具,如信号量、互斥信号量和消息队列,简化应用的开发。
但任务切换将消耗CPU时间,即使在32位处理器上,RTOS也会造成时间损失。任务切换比中断占用更多的时间。如果是一个很小的应用程序,但需要充分利用处理器资源,在这种情况下,需仔细考虑RTOS的可行性。
每种调度算法都有其优缺点,了解RTOS常用的调度算法,可以帮助我们做出合适的选择。
-
微控制器
+关注
关注
48文章
7535浏览量
151289 -
cpu
+关注
关注
68文章
10850浏览量
211517 -
RTOS
+关注
关注
22文章
811浏览量
119566
原文标题:RTOS应用中的调度策略
文章出处:【微信号:strongerHuang,微信公众号:strongerHuang】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
RTOS实时内核μC/OS怎么优化任务调度算法?
RT_Thread的算法和uCosIII的调度算法一样吗?
调度器的原理及其任务调度代码实现
基于DiffServ模型的调度算法
网格任务调度算法研究
基于嵌入式RTOS的闭环反馈调度算法的研究
动态车间调度问题的改进微粒群算法

电梯调度算法有哪些?
来了解一下RTOS应用中的调度策略
RTOS应用中的调度策略






 工商网监
工商网监
评论