 KUKA机器人首次投入运行的整个步骤
KUKA机器人首次投入运行的整个步骤
在首次接通连有机器人本体运动机构的 KR C4 时务必考虑以下步骤。
这些步骤不能取代首次投入运行的整个步骤!
1. 接通 KR C4。
2. 选择运行方式 T1。
3. 显示以下查询:"RDC 存储器和控制系统不一致 什么被更换了?"
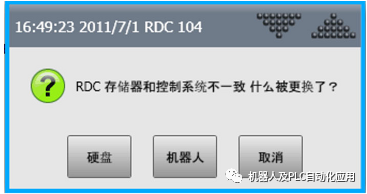
用按键 机器人 确认。
用按键 OK 确认。
6. 用按键 全部 OK 确认在信息窗口可以被确认的所有信息。

1 主菜单按键
2 信息窗口
3 按键 全部 OK
7. 以下信息无法确认:
KSS15068安全配置的校验总和不正确。
KSS12017未确认操作人员防护装置
KSS00404安全停止
为了确认这类信息,必须均衡机器人 (RDC) 和机器人控制器之间的安全配置:按下主菜单按键,并选择菜单序列配置 > 用户组。然后按下登录...。
8. 选定用户组 安全维护人员。在使用 KUKA.SafeOperation 时,选定用户组安全调试员。
9. 输入密码(默认:kuka),然后用 登录确认。(大众版本可直接使用专家盘进入专家模式).
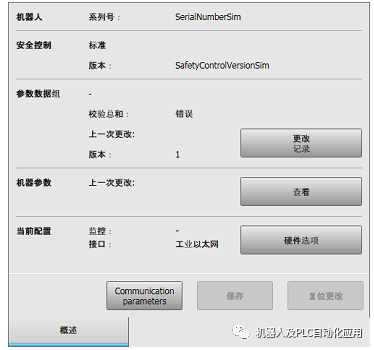
10.确认信息 KSS15068 和 KSS00404:
按下主菜单按键,并选择菜单序列配置 > 安全配置。
在窗口故障排除助手中即显示可能的故障原因的概览。
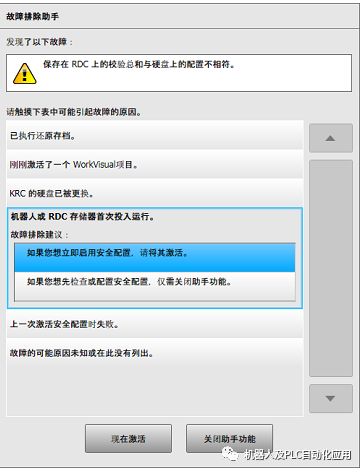
在该列表中选中字段:机器人或 RDC 存储器首次投入运行。
在所选中字段的下面即显示排除建议。
在此选中字段:如果您想立即启用安全配置,请将其激活。
按下按键现在激活。窗口通用自动打开。
窗口通用通过关闭图标 关闭。
显示以下信息:已成功保存改动。用按键 OK 确认。
11.确认信息 KSS12017(在此过程中要区分两种情况):
机器人有 X11 时的方法:用防护门上的确认键确认。
机器人无 X11 时的方法 (IBN-T1):按下主菜单按键,并选择菜单序
列投入运行 > 售后服务 > 投入运行模式。
-
控制系统
+关注
关注
41文章
6611浏览量
110590 -
存储器
+关注
关注
38文章
7487浏览量
163803 -
KUKA机器人
+关注
关注
4文章
143浏览量
9074
原文标题:KUKA 更换完机器人本体后-投入运行模式
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
工业机器人的末端关节旋转该精确控制?
KUKA机器人问题解答
KUKA库卡机器人伺服驱动器相关型号举例
KUKA焊接机器人伺服电机常见故障及维修处理
工业机器人组成结构相关资料分享
库卡机器人MGV电源模块维修
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?
KUKA工业机器人与S7-1200PLC实现Profinet通讯的步骤






 工商网监
工商网监
评论