 Kalman滤波通俗理解+实际应用
Kalman滤波通俗理解+实际应用
01 Kalman用于解决什么的问题
卡尔曼滤波是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法。由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是滤波过程。
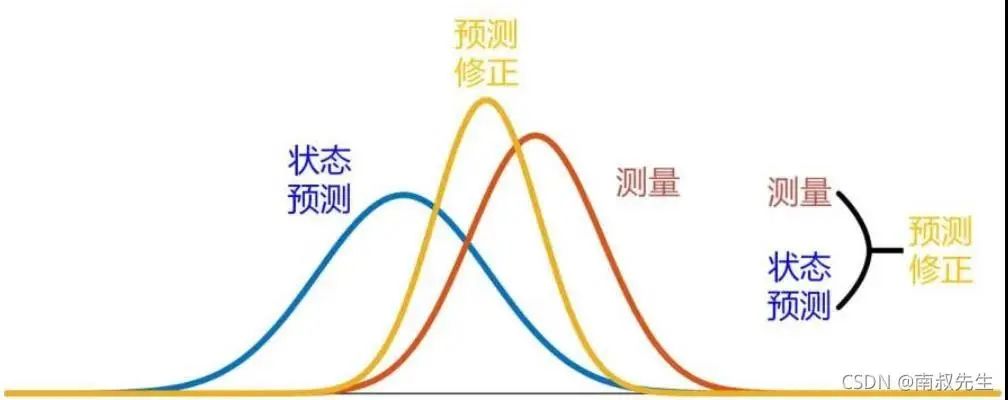
人话就是:线性数学模型算出预测值+传感测量值=更准确的测量值。
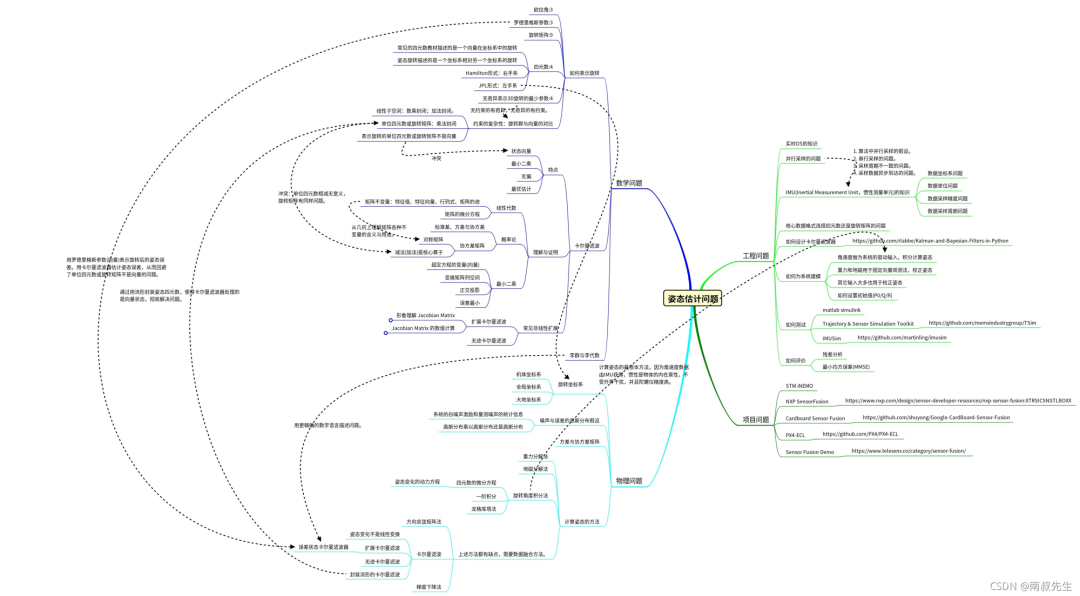
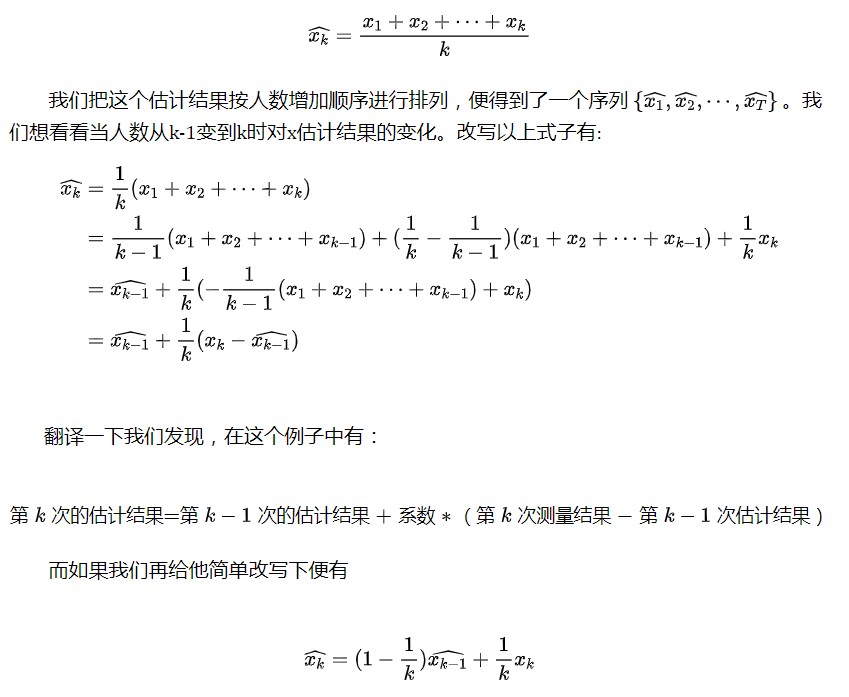
02 先来看一下姿态估计问题
03 看几个例子
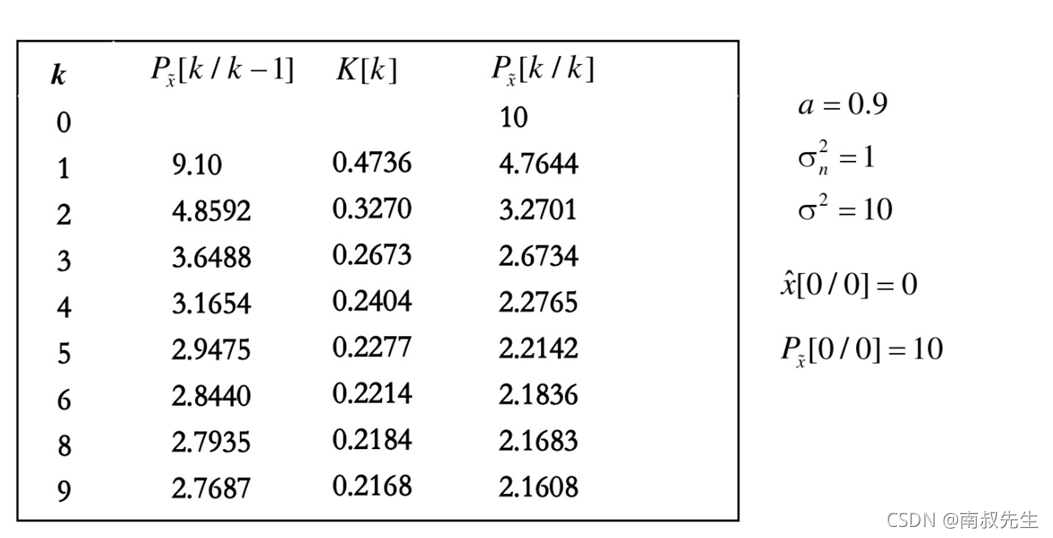
(1)例题1

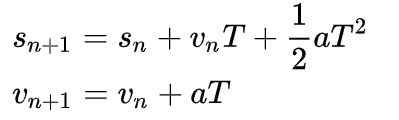
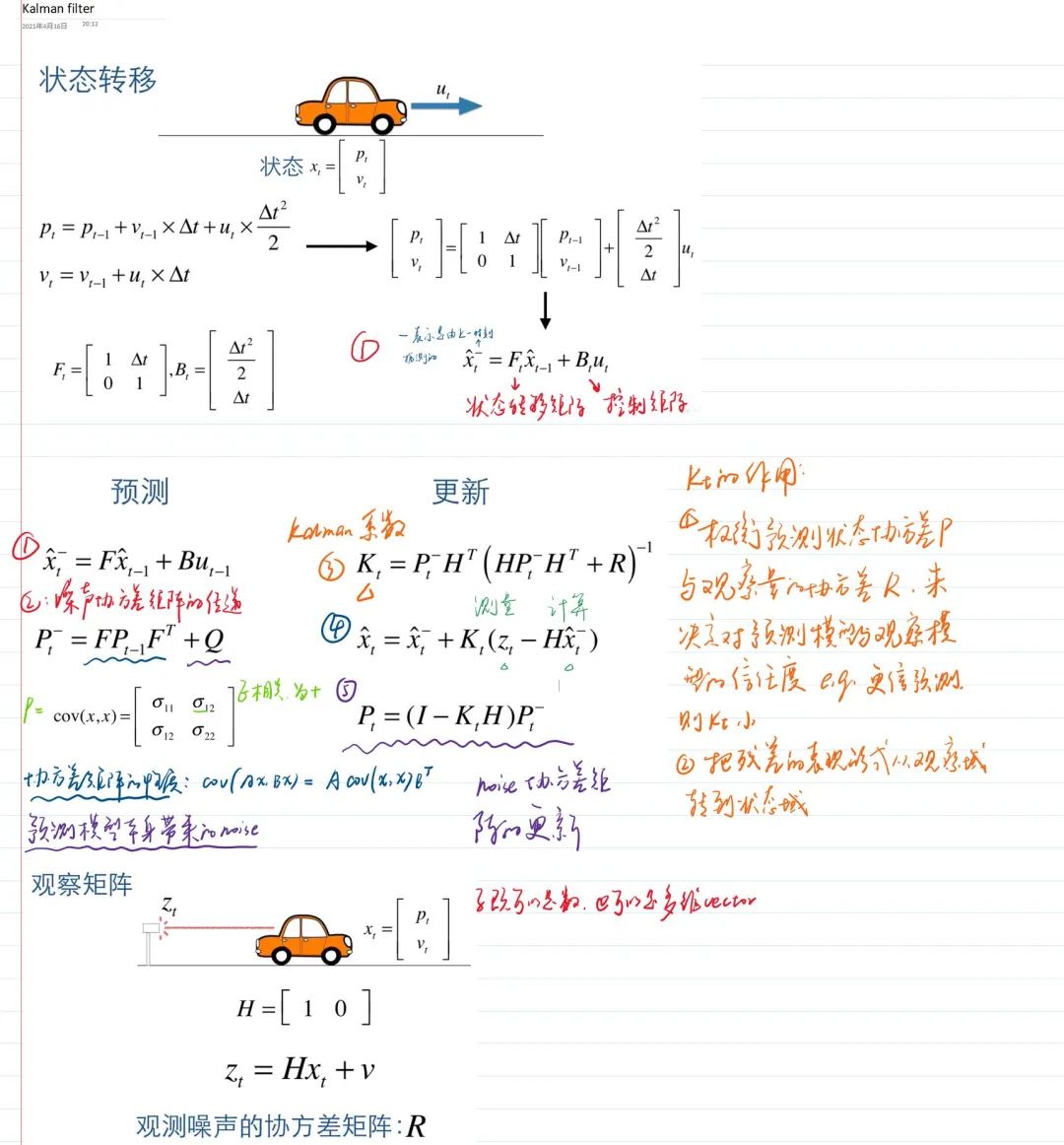
(2)例题2——运动模型,写出匀加速运动的状态转移方程
第一步,根据基本的物理运动方程,写出状态方程
第二步,写出观测方程模型
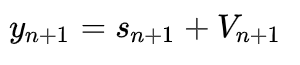
我开始也不明白这个观测方程是啥意思,实际上这是模拟传感器的测量值,S代表位移,V代表误差。这里代表目标测量量为位移。
第三步,将第一步和第二步的状态方程与观测方程写成矩阵形式
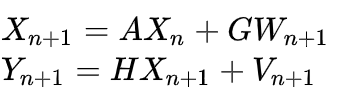
根据对应关系,可以得到系数:

其中A叫做状态转移矩阵,G叫做控制矩阵,H叫做预测矩阵
给定一个初值,就可以迭代得到后面的值了。
04 计算流程
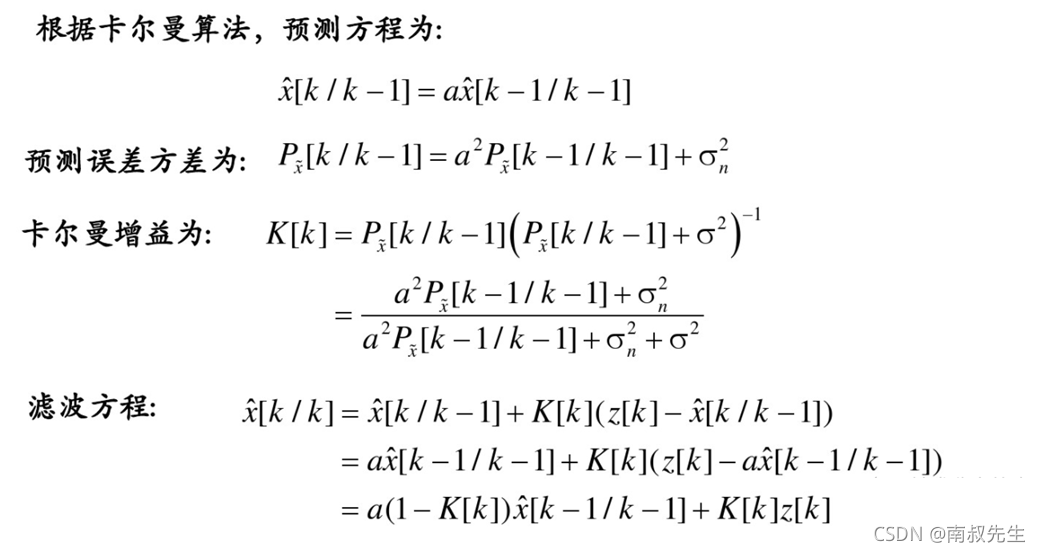
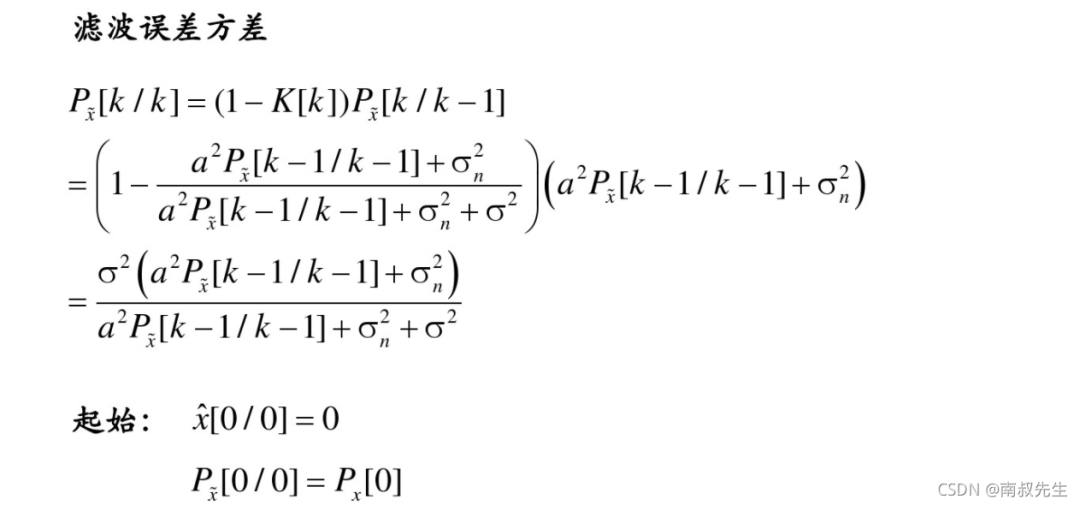
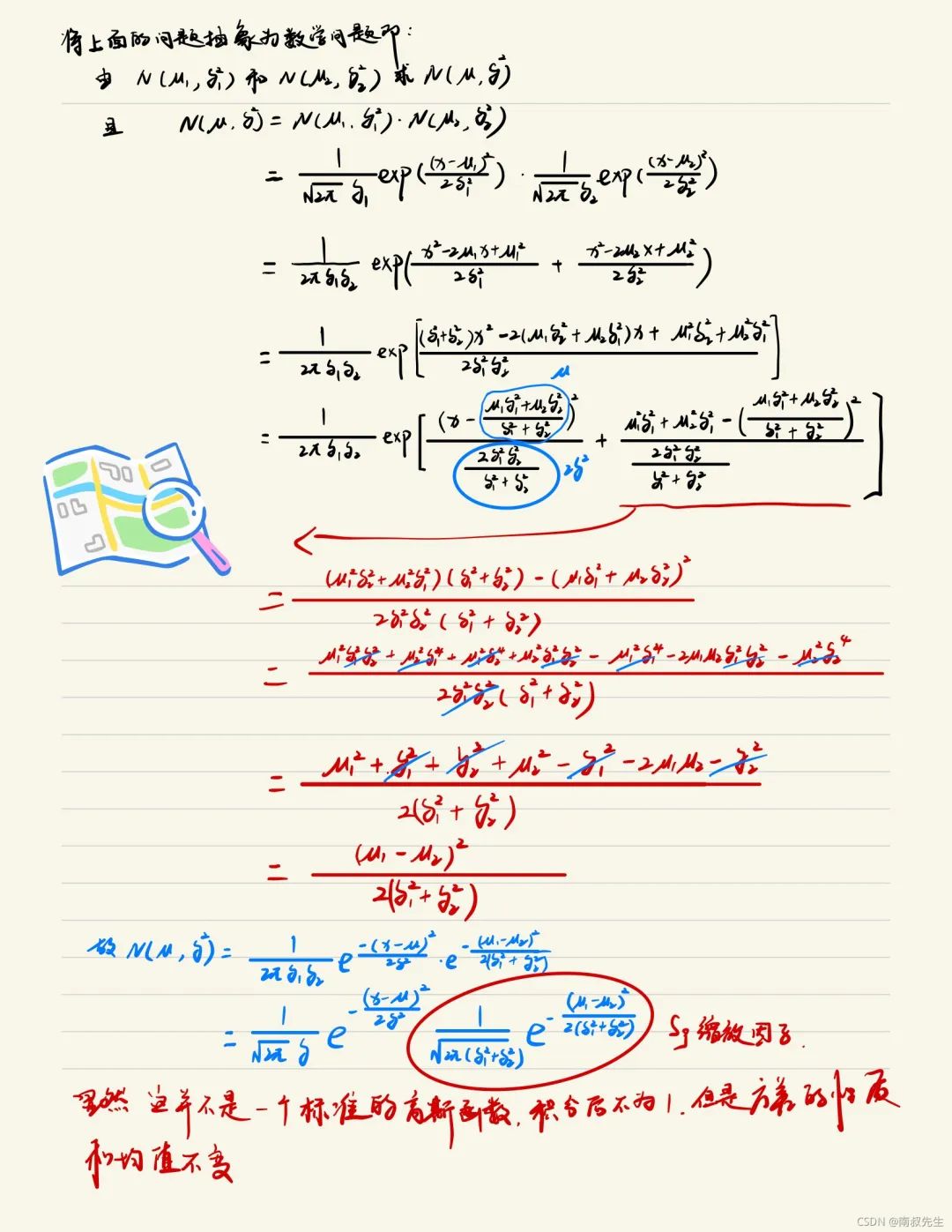
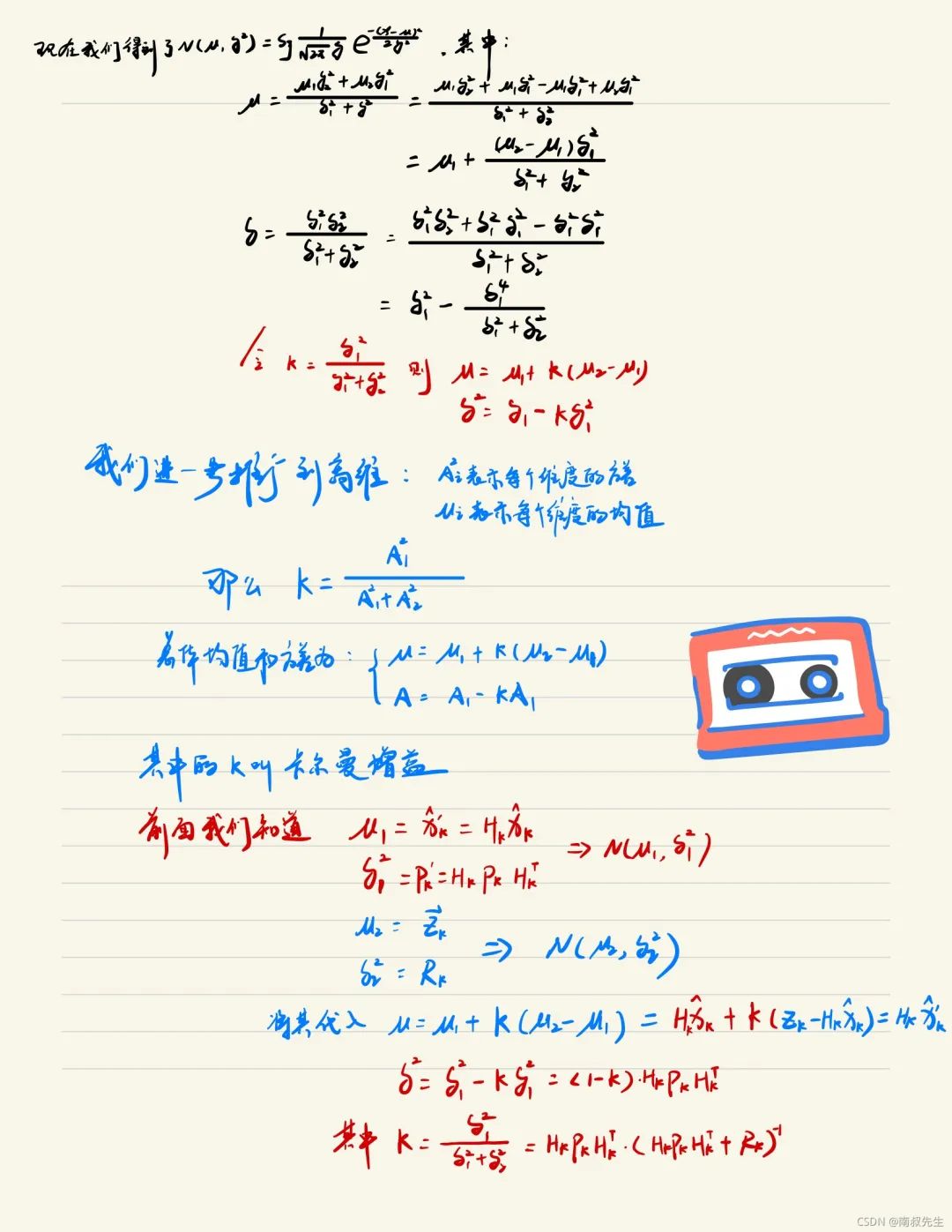
05 详细推导

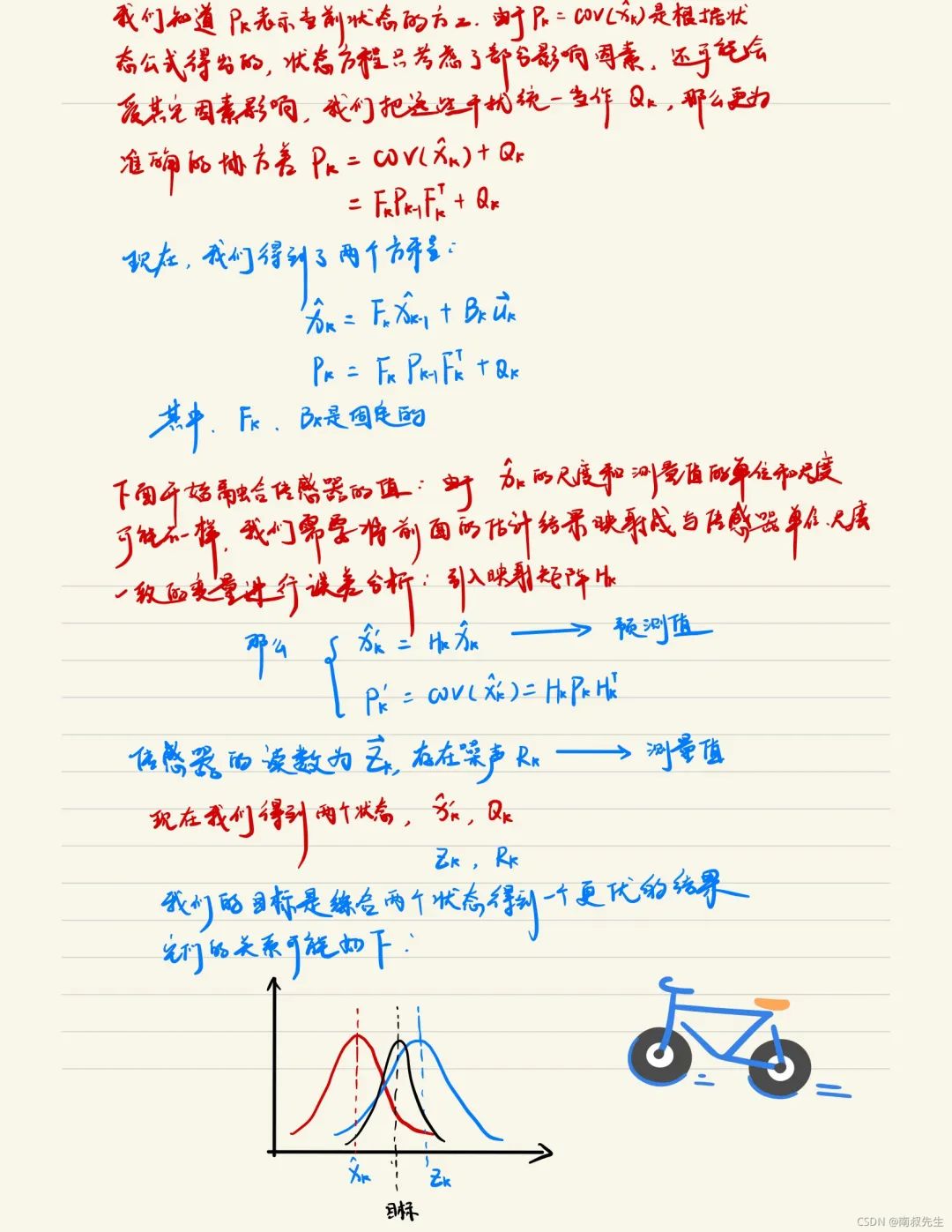
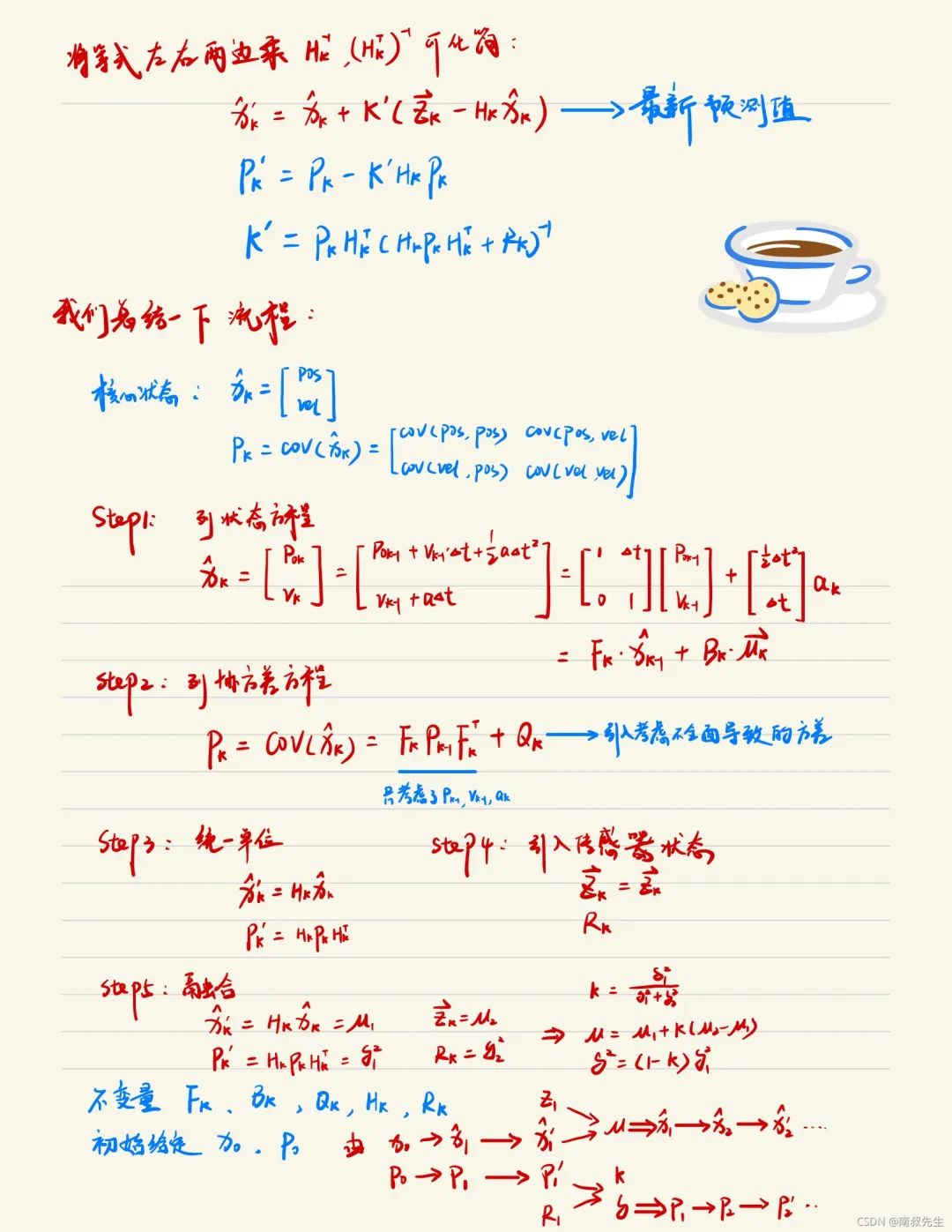
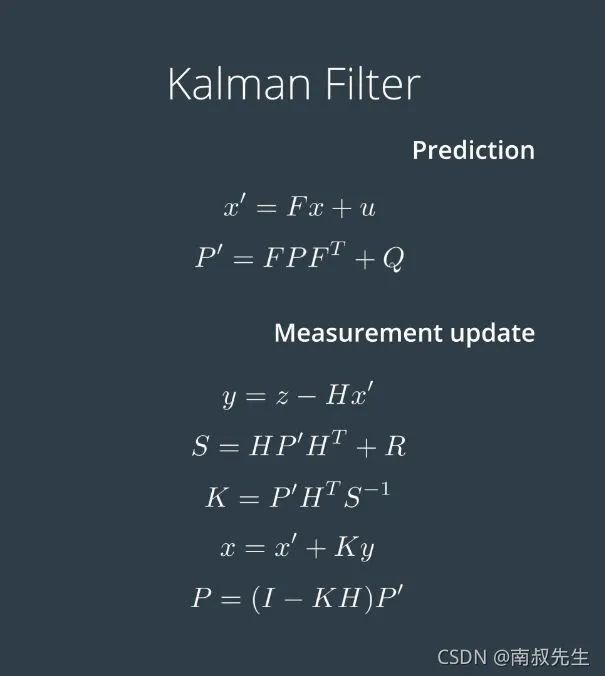
下图更简洁的展示了计算流程:
其中F为控制矩阵,Q为预测不确定性,R为传感器噪声,H为映射矩阵,y为误差,
S为方差之和,K为卡尔曼增益,P为更新后的协方差
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
状态机
+关注
关注
2文章
492浏览量
27536 -
卡尔曼滤波算法
+关注
关注
0文章
12浏览量
2103
原文标题:Kalman滤波通俗理解+实际应用
文章出处:【微信号:3D视觉工坊,微信公众号:3D视觉工坊】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于Kalman滤波的多尺度融合估计新算法
将信号的多尺度分析方法与多传感器数据融合技术相结合,基于某一尺度上给定的状态模型和在不同尺度上拥有不同采样率的多传感器分布式动态系统,提出了一种新的基于Kalman 滤波
发表于 06-22 13:15
•21次下载
Kalman滤波在视频监控中的应用
Kalman滤波在视频监控中的应用摘要:卡尔曼滤波(Kalman) 是一种根据时变随机信号的统计特性,对信号的未来值做出尽可能接近真值的一种估计方法. 首先对卡尔曼滤
发表于 05-05 16:26
•30次下载
FPGA的Kalman滤波器的设计
FPGA的Kalman滤波器的设计
摘要:针对电路设计中经常碰到数据的噪声干扰现象,提出了一种Kalman滤波的FPGA实现方法。该方法采用了TI公司的高精度模数转换
发表于 04-13 13:32
•2920次阅读
Kalman滤波算法在加速度计自标定中的应用
针对自标定加速度计组合动基座试验数据中存在的数据异常问题,推导并运用自适应Kalman滤波算法剔除异常数据,通过对不同Kalman滤波算法自标定精度解算结果的均值和标准差进行比较
发表于 04-12 17:08
•0次下载
基于Kalman滤波的俯仰角速度估计
直升机的姿态角速度不容易准确获得,本文提出了一种采用Kalman滤波理论对直升机俯仰角速度进行估计的方法,建立俯仰角速度方程,给出估计参数的Kalman滤波算法,实验证明该方法能
发表于 06-21 16:37
•31次下载





 工商网监
工商网监
评论