 机器视觉基础知识汇总
机器视觉基础知识汇总

基础知识汇总
视觉是人类观察和认知世界的重要手段。随着信息技术的发展,人类逐渐把这种技能赋予计算机、机器人或者其他智能机器,这就是我们今天所要提到的机器视觉技术。
目前机器视觉技术已经实现了产品化、实用化,镜头、高速相机、光源、图像软件、图像采集卡、视觉处理器等相关产品功能日益完善。机器视觉技术在信息化时代正扮演着越来越重要的角色。
到如今,中国已经成为世界机器视觉发展最为活跃地区,应用范围涵盖了工业、农业、医药、军事、航天、气象等国民经济各个行业。虽然机器视觉的成长速度非常快,但是还是有很多人对机器视觉并不了解,今天我们来了解下机器视觉。
01什么是机器视觉系统?
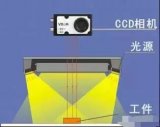
机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是指通过机器视觉产品(即图像摄取装置,分CMOS和CCD两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。
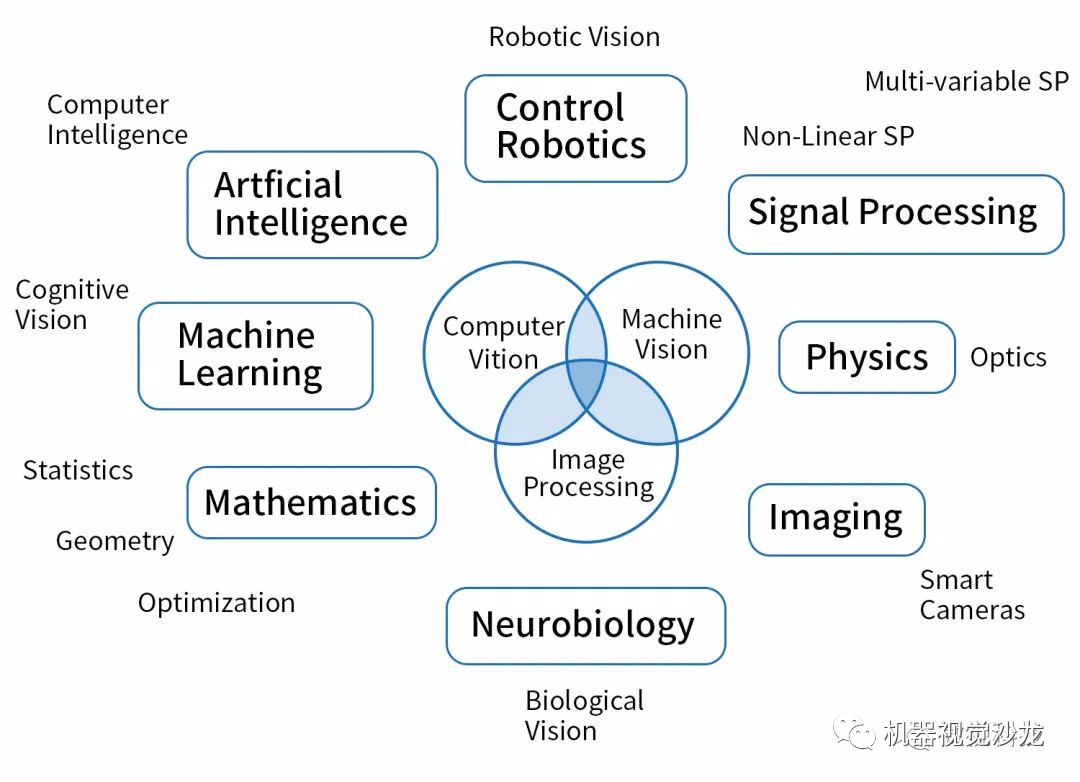
与计算机视觉相比,机器视觉偏重于计算机视觉技术工程化,能够自动获取和分析特定的图像,对准确度和处理速度要求都比较高,一般而言,计算机视觉多用来识别“人”,而机器视觉则多用来识别“物”。
具体来讲,计算机视觉应用的场景相对复杂,要识别的物体类型也多,形状不规则、规律性不强,有时甚至很难用客观量作为识别的依据,比如识别年龄、性别,对于光线、距离、角度等条件要求较低;而对准确度和处理速度要求都比较高,一般机器视觉的分辨率远高于计算机视觉,而且往往要求实时,处理速度非常关键。
02机器视觉的优势
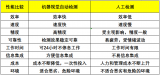
机器视觉系统具有高效率、高度自动化的特点,可以实现很高的分辨率精度和速度。机器视觉系统与被检测对象无接触,安全可靠。人工检测与机器视觉自动检测的主要区别有:

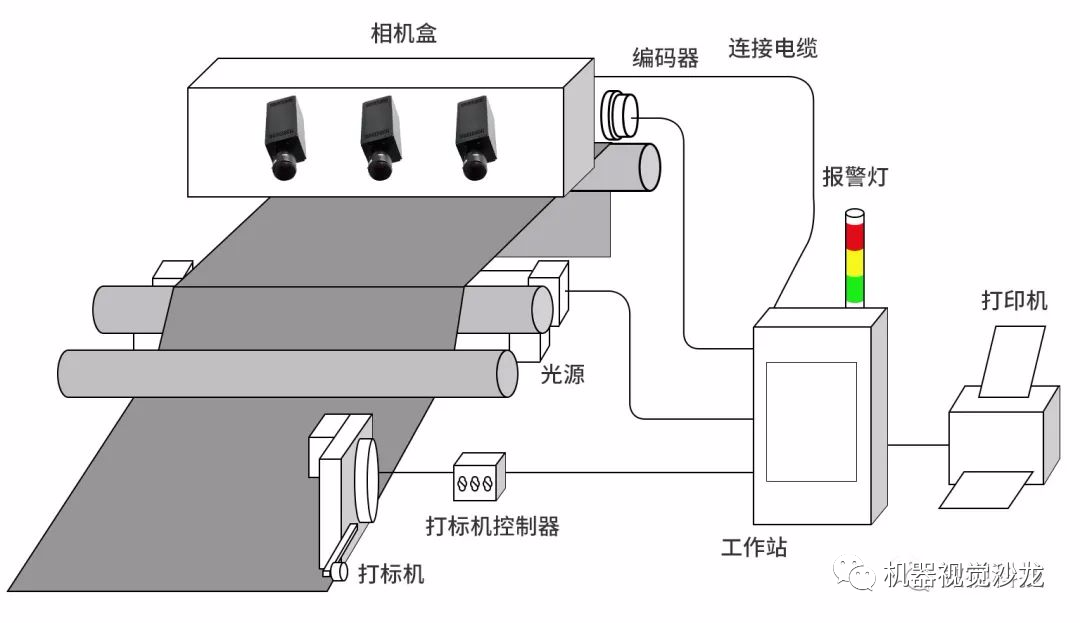
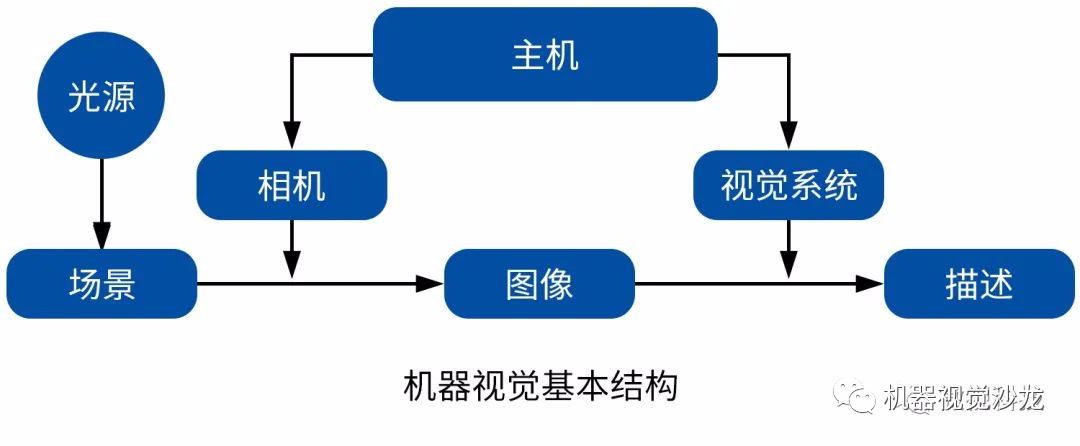
03系统组成
一个典型的机器视觉系统包括以下部分:
(1)照明
照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。由于没有通用的机器视觉光源照明设备,所以针对每个特定的应用实例,要选择相应的照明装置,以达到最佳的效果。
光源可分为可见光和不可见光,常见的几种可见光源有白炽灯、日光灯、水银灯和钠光灯。可见光的缺点是光能不稳定。所以如何使光能在一定的程度上保持稳定,是目前急需解决的问题;另一方面,环境光有可能影响图像的质量,所以可采用加防护屏的方法来减少环境光的影响。
照明系统按照照射方法可分为:背向照明、前向照明、结构光和频闪光照明等。其中,背向光照明是被测物放在光源和摄像机之间,它的优点是能获得高对比度的图像;前向照明是光源和摄像机位于被测物的同侧,这种方式便于安装;结构光照明是将光栅或光源等投射到被测物上,根据它们产生的即便,调解出被测物体的三维信息。频闪光照明是将高频率的光脉冲照射到物体上,摄像机拍摄要求与光源同步。
(2)镜头
工业镜头
FOV(Field Of vision)=所需分辨率*亚像素*相机尺寸/PRTM(零件测量公差)
选择镜头需要注意:
焦距
目标高度
影像高度
放大倍数
影像至目标的距离
中心点/节点
畸变
(3)相机
按照不同标准可分为:标准分辨率数字相机和模拟相机等。
要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD和面阵CCD、单色相机和彩色相机。
(4)图像采集卡
图像采集卡只是完整的机器视觉系统的一个部件,但是它扮演一个非常重要的角色;图像采集卡直接决定了摄像头的接口:黑白、彩色、模拟、数字等。
比较典型的是PCI或AGP兼容的捕获卡,可以将图像迅速地传送到计算机存储器进行处理,有些采集卡有内置的多路开关。例如,可以连接8个不同的摄像机,然后告诉采集卡采用那一个相机抓拍到的信息。有些采集卡有内置的数字输入以触发采集卡进行捕捉,当采集卡抓拍图像时数字输出口就触发闸门。
(5)视觉处理器
视觉处理器集采集卡与处理器与一体。以往计算机速度较慢时,采用视觉处理器加快视觉处理任务,现在由于采集卡可以快速传输图像到存储器,而且计算机也快多了,所以现在视觉处理器用的较少了。
04工业镜头
工业镜头的接口:
| C型: | C型接口镜头与摄像机接触面至镜头焦平面(摄像机CCD光电感应处的位置)的距离为17.5mm |
| CS型: | CS型接口距离为12.5mm,CS型镜头与CS型摄像机可以配合使用。C型镜头与CS型摄像机之间增加一个5mm的C/CS转接环可以配合使用,CS型镜头与C型摄像机无法配合使用。 |
| F型: | 通用型接口,一般适用于焦距大于25mm的镜头。any |
05基本参数
| 视场: | 即FOV,也叫视野范围,指观测物体的可视范围,也就是充满相机采集芯片的物体部分。 |
| 工作距离: | 即WD,指从镜头前部到受检测物体的距离,即清晰成像的表面距离。 |
| 分辨率: | 图像系统可以测到的受检验物体上的最小可分辨率特征尺寸,在多数情况下,视野越小,分辨率越好。 |
| 景深: | 即DOF,物体离最佳焦点较近或比较较远时,镜头保持所需分辨率的能力。 |
| 焦距 (f): |
是光学系统中衡量光的聚集或发散的度量方式,指从透镜的光心到光聚焦之焦点的距离,也是照相机中,从镜片中心到底片或CCD等成像平面的距离。 焦距大小的影响情况:焦距越小,景深越大;焦距越小,畸变越大;焦距越小,渐晕现象越严重,使像差边缘的照度降低。 |
| 失真: | 又称为畸变,指被摄物平面内的主轴直线,经光学系统成像后变为曲线,则此光学系统的成像误差称为畸变,畸变像差只影响影像的几何形状,而不影响影像的清晰度。 |
| 光圈与F值: | 光圈是一个用来控制镜头通光量的装置,它通常是在镜头内,表达光圈大小我们是用F值,如f2,f4。 |
06工业相机的选择要点
(1)视野范围、光学放大倍数及期望的工作距离:在选择镜头时,我们会选择比被测物体视野稍大一点的镜头,有利于运动控制。
(2)景深要求:对于对景深有要求的项目,尽可能使用小光圈;在选择放大倍率的镜头时,在项目许可下尽可能选用低倍率镜头;如果项目要求比较苛刻时,倾向选择高景深的尖端镜头。
(3)芯片大小和相机接口:例如2/3镜头支持最大的工业相机耙面为2/3,它是不能支持1英寸以上的工业相机。
(4)注意与光源的配合,选配合适的镜头。
(5)可安装空间:在方案可选择情况下,让客户更改设备尺寸是不现实的。
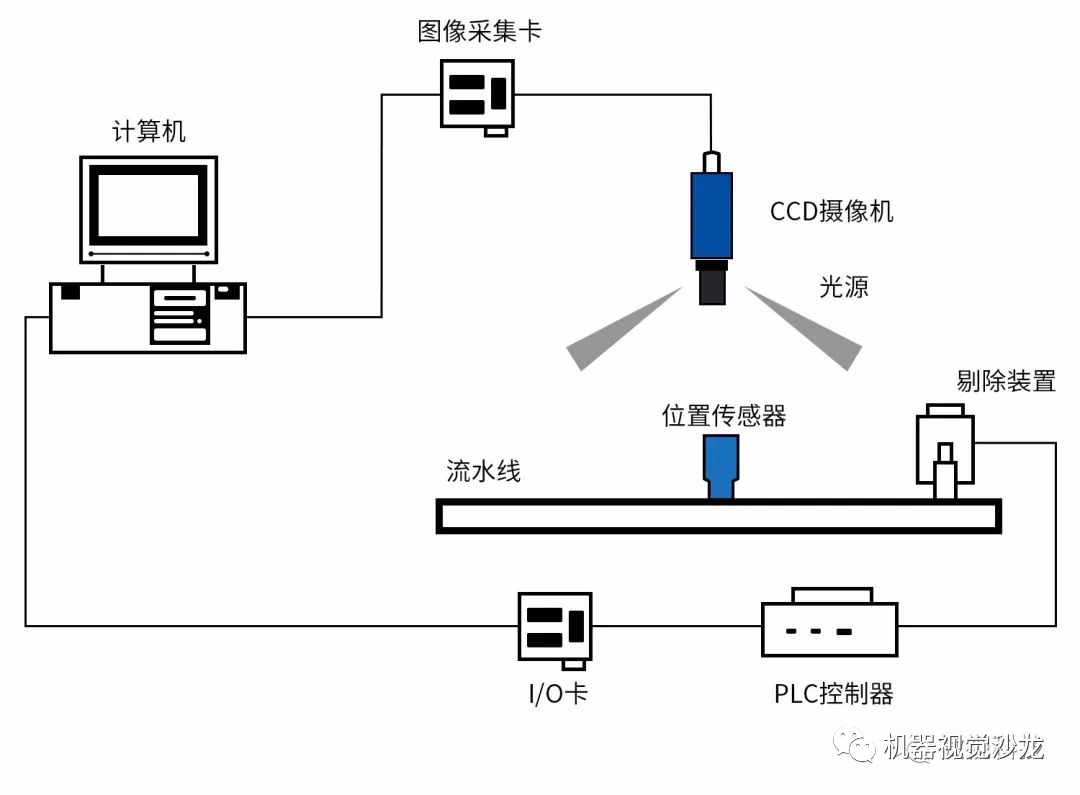
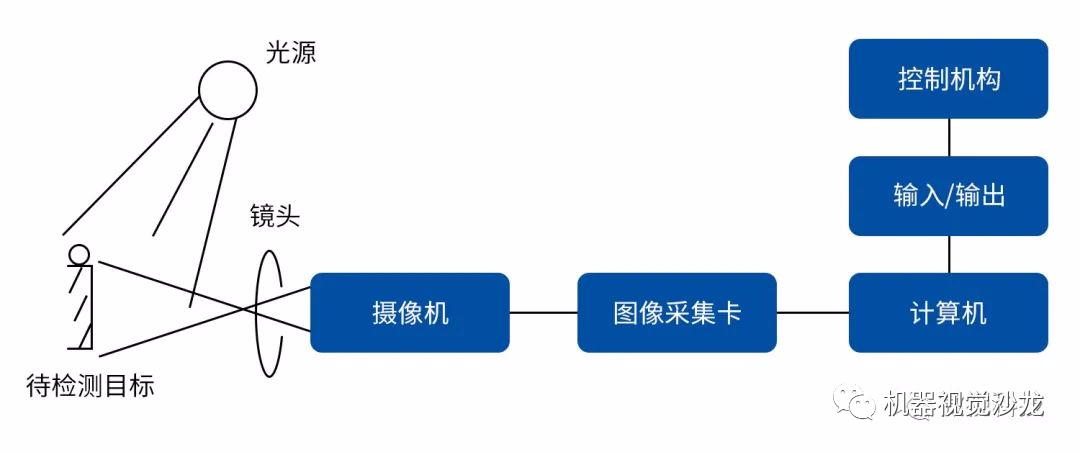
07机器视觉的工作原理
机器视觉检测系统是采用CCD照相机将被检测的目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号,图像处理系统对这些信号进行各种运算来收取目标的特征,如面积、数量、位置、长度,再根据预设的允许度和其他条件输出结果,包括尺寸、角度、个数、合格/不合格、有/无等,实现自动识别功能。
08机器视觉特点
摄像机的拍照速度自动与被测物的速度相匹配,拍摄到理想的图像;
零件的尺寸范围为2.4mm到12mm,厚度可以不同;
系统根据操作者选择不同尺寸的工件,调用相应视觉程序进行尺寸检测,并输出结果;
针对不同尺寸的零件,排序装置和输送装置可以精确调整料道的宽度,使零件在固定路径上运动并进行视觉检测;
机器视觉系统分辨率达到2448×2048,动态检测精度可以达到0.02mm;
废品漏检率为0;
本系统可通过显示图像监视检测过程,也可通过界面显示的检测数据动态查看检测结果;
具有对错误工件及时准确发出剔除控制信号、剔除废品的功能;
系统能够自检其主要设备的状态是否正常,配有状态指示灯;同时能够设置系统维护人员、使用人员不同的操作权限;
实时显示检测画面,中文界面,可以浏览几次不合格品的图像,具有能够存储和实时察看错误工件图像的功能;
能生成错误结果信息文件,包含对应的错误图像,并能打印输出。
09机器视觉的应用领域
1.识别
2.标准一维码、二维码的解码
3.光学字符识别(OCR)和确认(OCV)
4.检测
5.色彩和瑕疵检测
6.零件或部件的有无检测
7.目标位置和方向检测和测量
8.尺寸和容量检测
9.预设标记的测量,如孔位到孔位的距离
10.机械手引导
11.输出空间坐标引导机械手精确定位
10机器视觉与计算机视觉的区别?
计算机视觉,主要是对质的分析,比如分类识别,这是一个杯子那是一条狗。或者做身份确认,比如人脸识别,车牌识别。或者做行为分析,比如人员入侵,徘徊,遗留物,人群聚集等。
机器视觉,主要侧重对量的分析,比如通过视觉去测量一个零件的直径,一般来说,对准确度要求很高。我记得以前接触过一个需求: 视觉测量铁路道岔缺口。哥刚毕业的时候在铁路上班,做过控制系统,还开过内燃机车,很清楚道岔缺口的重要性,这玩意儿你说要是测不准,呵呵:)
当然,也不能完全按质或量一刀切,有些计算机视觉应用也需要分析量,比如商场的人数统计。有些机器视觉也需要分析质,比如零件自动分拣。但,计算机视觉一般来说对量的要求不会很高,商场人数统计误差个百分之几死不了人的,但机器视觉真的会,比如那个道岔缺口测量。
来源:机器视觉沙龙
审核编辑:汤梓红
-
CMOS
+关注
关注
58文章
6233浏览量
243394 -
CCD
+关注
关注
32文章
907浏览量
149818 -
机器人
+关注
关注
213文章
31439浏览量
223626 -
计算机
+关注
关注
19文章
7841浏览量
93460 -
机器视觉
+关注
关注
166文章
4830浏览量
126492
原文标题:【光电智造】机器视觉基础知识汇总
文章出处:【微信号:今日光电,微信公众号:今日光电】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
电镀的基础知识汇总
一文让你搞懂机器视觉入门基础知识

机器视觉基础知识汇总



评论