 湖冰遥感研究进展1.0-莱森光学
湖冰遥感研究进展1.0-莱森光学

引言
全球1.17亿个湖泊中,有一半以上的湖泊间歇或长期被湖冰所覆盖。湖冰不仅是冰冻圈的重要组成部分,也是区域乃至全球气候的指示器。湖冰季节性特征显著,能够直观反映出气温的变化。已有研究表明长时间序列的湖冰观测数据可作为代用气候记录。另一方面,随着湖冰的变化,湖泊表面的反射率等属性也会发生变化,进而影响湖泊和大气的物质和能量交换,加剧气候变化。
通过“WebofScience”核心数据库,对检索主题为“lakeice”的2000-2021年间的论文数量、被引频次(图1)

图1 2000-2021年期间以“lake ice”为主题的SCI论文数量及被引频次
随着不同遥感传感器技术的迅速发展及各类遥感数据源的获取更加便捷,湖冰遥感监测研究已发展了大量不同监测技术和参数反演方法;并且,不同的学者开展湖冰研究所针对的湖泊对象、研究时段等都不一致,有必要汇总现有代表性研究结果,形成湖冰参数及变化特征在更宏观时空尺度上的科学认识和理解。本文在充分整理已有文献的基础上,总结了湖冰遥感监测的数据源发展,再从湖冰范围、物候、冰厚三个方面阐述遥感监测或参数反演方法,最后通过对文献的总结,探讨当前湖冰研究热点区域的湖冰变化趋势及影响因素。
湖冰监测遥感数据源发展状况
2.1 湖冰监测遥感卫星发展
遥感从20世纪70年代开始应用于湖冰监测,主要方式大致可以分为两大类:光学遥感和微波遥感。光学遥感是接收地面反射太阳能量的被动式系统,因此受云层的限制较大,在云层较厚和极夜情况下无法使用;微波受天气状况的影响较小,对云层具有一定穿透能力,可以全天候地对地表进行监测,是常年多云地区的湖冰监测的重要手段。
2.1.1光学遥感
光学遥感主要通过地物的反射光谱来区分地物,是确定冰盖存在的重要工具。随着国产卫星的不断发展,天宫二号、高分系列卫星等也越来越多的应用于湖冰遥感监测中,GF-1和GF-6卫星的多光谱空间分辨率为16m,二者结合部分地区的重访周期可达2-4天。
2.1.2微波遥感微波
遥感又分为被动微波遥感和主动微波遥感,前者测量物体热辐射,用亮温值来度量地物属性,后者通过发射电磁波获取地物后向散射系数来探测地物属性。与水体相比,冰的亮温值和后向散射系数值都较高,且均随着冰厚的增加而增加。因此,利用水体和冰的亮温与后向散射差异,可以获取湖冰物候和冰厚信息。
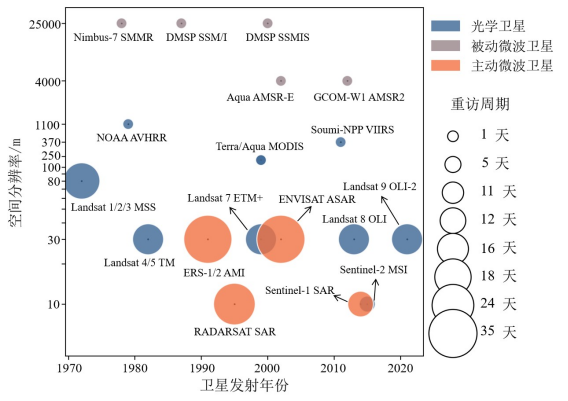
图3 湖冰监测研究中常见的遥感卫星
常用于湖冰监测的被动微波传感器包括SMMR、SSM/I、AMSR-E/2和MWRI等。被动微波数据虽然可以达到每日重访,但空间分辨率都比较低(部分25000m),岸线混合像元对湖冰识别精度影响较大,一般只适用于大型湖泊(比如>500km²)的湖冰监测。主动微波遥感主要传感器类型包括侧视真实孔径雷达(SLAR)、合成孔径雷达(SAR)、散射计及雷达高度计(RA)。其中,SAR是最常见的主动微波传感器,在过去50年里,70%的主动微波湖冰产品都使用了SAR数据。随着SAR的不断发展,也有学者使用SAR数据进一步研究湖冰类型、粗糙度、气泡含量等冰结构。1987年前,利用主动微波遥感进行的湖冰监测研究是基于SAR数据的X波段,随着欧空局(ESA)ERS-1卫星的发射,C波段SAR数据受到越来越多学者的青睐。利用C波段SAR遥感可以很容易地检测到湖水冻结,且对提取湖冰物候信息的准确性较高。主动微波遥感数据重访周期较长,不适合独立应用于湖冰物候监测研究。
2.2 其他遥感数据源
发展野外实地探测时,在湖泊薄冰区域直接搭建仪器作业会有一定的危险性,利用航空遥感平台监测是安全有效的方法。航空遥感搭载体积小、成本低、连续性强的探地雷达系统(GPR)在大范围平坦冰面的冰厚监测中发挥着重要作用。早期的航空遥感采用飞机和直升机载人操作使用侧视机载雷达观测了阿拉斯加北坡湖冰。但直升机飞行前需要经过严格的审批,投入大量的时间与成本。无人机(UAV)的发展为航空遥感提供了新的途径。无人机有机动性强、事故率低、操作灵活、探测区域受限制小等优点,与探地雷达结合可以更好地发挥二者优势。常用的轻小型无人机测绘遥感飞行平台包括固定翼、旋翼和无人直升机等。卫星遥感冰厚监测在精度及适应性上还存在局限性,但机载雷达观测数据可为湖冰厚度遥感反演与模拟提供可靠的验证数据。
湖冰识别与湖冰物候、冰厚遥感监测研究进展
3.1 湖冰遥感识别方法
3.1.1遥感影像目视解译
目视解译时可以通过波段组合的方式来突出显示水体和冰面的差异。如对Landsat8影像按照波段(Band-5/6/2)进行RGB假彩色合成:由于水体对可见光波段的强吸收作用,在湖泊未结冰之前,水体颜色呈黑色,水陆边界明显;而封冻时冰面呈现紫色,纹理特征明显,随着冰厚的增加,冰面颜色也由浅紫色向深紫色过渡。正是水体和冰面颜色、纹理等特征的差异,目视解译才可以很好的将水体和冰面区分开。
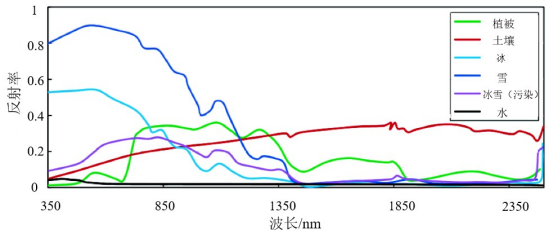
图4 冰、水以及其他主要地物的光谱反射率曲线图
3.1.2单波段/遥感参量阈值法
单波段/遥感参量阈值法利用单一波段或遥感参量的反射率、亮温或后向散射系数的差异来直接区分水和冰。由于水体在近红外波段的反射率较低,在700nm以后反射率降低至几乎为0;而冰在350-850nm波段仍有较高的反射率,且随着波长的增加反射率逐渐降低。利用水和冰在近红外波段反射率的差异,在晴朗无云的情况下,可以对二者较好的进行区分:设定阈值a,当近红外波段的反射率大于a时,则认为该像元为冰。除此,由于水和冰的热力差异,利用亮温数据也可以区分湖冰和水体。湖冰后向散射系数比水体高,也可以用于较准确的冰水区分。
3.1.3多波段/遥感参量指数阈值法
多波段/遥感参量指数阈值法是利用水和冰在多个波段或遥感参量的特征差异来构建遥感指数间接提取湖冰的方法。归一化差值积雪指数NDSI是最常用的指数,由绿光波段和短波红外波段反射率计算得到,可以有效地减少植被、建筑阴影等噪声对湖冰监测带来的影响(魏秋方和叶庆华,2010),以MODIS传感器数据为例,NDSI的计算公式(1)如下:
NDSI=(Band4-Band6)/(Band4+Band6)(1)
式中:Band4为MODIS数据第4波段(绿光)反射率值;Band6为MODIS数据第6波段(短波红外)反射率值。魏秋方提出了改进的归一化差值积雪指数MNDSI,由近红外波段和短波红外波段反射率计算得到。这样改进的MNDSI在计算水体和冰面时结果反差比NDSI要明显,更有利于区分水体和冰面。MNDSI的计算公式(2)如下:
MNDSI=(Band2-Band6)/(Band2+Band6(2)
式中:Band2为MODIS数据第2波段(近红外)反射率值;Band6为MODIS数据第6波段(短波红外)反射率值。阈值法还有一种基于被动微波遥感亮温数据的指数,由海冰密集度计算方法演变而来,是用极化比PR和频率梯度GR之比来区分水体和冰面,计算公式(3),(4)如下:
PR=(TB19V-TB19H)/(TB19V+TB19H)(3)
GR=(TB37V-TB19H)/(TB37V+TB19H)(4)
式中:TB19V、TB19H、TB37V分别表示19GHz垂直、水平和37GHz垂直极化亮温值。依据遥感数据源与湖泊所在区域的不同,分类阈值不一定相同,通常是设定一个初始阈值,并以0.0001递增/递减试错,最终得到最佳阈值。初步阈值的设定可以参考阈值法识别湖冰的相关文献:红光波段反射率>0.1,近红外波段反射率>0.05,红光波段反射率-近红外波段反射率>0.01,亮温数值<3.8,NDSI>0.15。
3.1.4机器学习方法
传统的机器学习法识别湖冰的方法是通过对遥感影像进行目视解译,选取典型的湖冰和水体像元建立训练样本集,再选择合适的分类器对影像进行分类和湖冰像元的提取。王琼等基于支持向量机(SVM)分类对色林错湖区的湖冰进行提取,发现支持向量机对于湖冰提取相对传统方法具有更显著的优势,总体分类精度在88.58%以上;随机森林(RF)分类也常用于区分水和冰,相较于单波段阈值法和多波段指数阈值法提取精度更高,分类精度为0.9965,验证精度为0.8072。Wu等评价了多个机器学习分类器的湖冰分类精度,包括MLR(多项逻辑回归分析)、SVM、RF、GTB(梯度提升树),其中RF和GTB的分类总体精度都达到了98%及以上,且RF对超参数的选择相对不敏感,有较大潜力用于提取大尺度湖冰分布范围。
随着人工智能技术的发展与突破,基于深度学习的湖冰遥感识别受到广泛关注。这种方法将湖冰检测视为二分类语义分割问题,通过卷积操作提取影像特征,进行湖冰分类,利用深度卷积网络的湖冰识别模型的平均交并比MIoU指标在90%以上。Ma等结合卷积神经网络和条件随机场,通过遥感影像探测湖水的冻结状态,平均总体精度达到93.10%,且对于小型湖泊有很好的应用效果。
3.1.5湖冰遥感识别方法
比较遥感影像目视解译法识别湖冰虽然有较高的精度,但需要依靠人为主观的经验进行判断,且湖泊众多,遥感数据量巨大,难以实现批量化、定量表达。因此现代的湖冰遥感监测以计算机自动化解译方式为主,目视解译主要应用于检验阶段。相对而言,机器学习方法具有高度智能化和分类自动化的优势,但机器学习模型用于冰面识别方法目前大多应用于海冰识别。现有湖冰遥感识别研究主要以单波段/遥感参量阈值法和多波段/遥感参量指数阈值法为主。
单波段/遥感参量阈值法操作简单,根据需求选定适合的判别因子即可,重点和难点在于阈值的确定,其大小将直接影响湖冰提取结果的精度。多波段/遥感参量指数阈值法的阈值较易确定,但会有少量云被误分的情况。一般而言,只用单个波段或数据进行湖冰监测,可能无法消除大气影响和系统误差,提取结果精度较差,单阈值法只是湖冰监测方法的一部分,结合多个阈值方法的效果更好。
在利用光学遥感数据监测湖冰方面,孙皓等选定红光波段和近红外波段之差和红光波段值阈值,对喜马拉雅山北坡四个典型湖泊的湖冰进行提取;基于长期地表温度,Nonaka等利用温度阈值来监测湖冰消融日期;NSIDC基于MODIS传感器数据利用NDSI指数阈值法创建的MOD10A1/MYD10A1冰雪产品。对于微波遥感数据,监测湖冰常用阈值法通常是基于后向散射系数和亮温值数据,或利用PR和GR之比来区分水体和冰面。
3.2 湖冰物候遥感监测
湖冰物候主要包括四个关键时间节点:湖面开始结冰的时间点——开始冻结时间FO;湖面首次出现全部冻结的时间点——完全冻结时间FU;湖冰开始融化的时间点——开始消融时间BO;湖冰完全融化的时间点——完全消融时间BU。由这四个时间节点可以进一步推算湖冰冰期DI(开始冻结和完全消融时间之间的长度)和湖冰完全封冻期DCI(完全冻结和开始消融时间之间的长度)。
湖冰物候遥感监测一般是按照湖冰覆盖占湖泊总面积的比值来确认湖冰物候特征参数。随着湖面温度的下降,湖水由浅水岸边结冰,在新生湖冰形成的过程中,可能会被强风或突然的升温打断。为了避免这种偶然情况和湖岸边混合像元的影响,一些学者将湖冰面积占湖泊面积比例超过5%时刻定义为开始冻结时间,湖冰面积占湖泊面积95%时刻定义为完全冻结时间。还有一些学者将该阈值分别调整至10%和90%。提取湖冰物候信息首先是确定遥感数据源,结冰时湖冰范围每天都在变化,同时云层遮挡也会对湖冰物候监测产生一定的影响,因此研究要求高时间分辨率的遥感数据源,影像去云及填充是数据预处理的关键步骤。
可以结合同一天的其他遥感数据源或上下期影像对被云层覆盖的范围进行判断:对于像素A,如果在同期的其他遥感数据中是水体(或其他类型如冰,下同),则该影像中像素A可确定为被水覆盖;如果日期t的一个像素A被云覆盖,则通过上一期及下一期影像判断,若上下两期都被水覆盖,则确定日期t的A像素被水覆盖。再利用上文介绍的湖冰识别方法提取湖冰信息,确定湖冰面积,计算湖冰占湖泊总面积的比值K,绘制该年份K值曲线,阈值线与K值曲线的交点即为物候信息的时间节点。
湖冰物候监测方法可基于不同的数据源:光学遥感数据中MODIS传感器数据因其每日的重访问周期而最为常用,辅以高空间分辨率的影像数据来验证提取的准确性;微波遥感数据如微波亮温数据通常生成时间序列,通过阈值法在时间序列上提取湖冰物候,如滑动t检验MTT阈值法可以有效的提取湖冰物候信息,检查时间序列上的每个点前后一段时间内的亮温数据是否有显著差异,获取突变点作为判断湖冰变化情况的依据;已有的冰雪产品可以直接计算湖冰面积变化;有学者基于AMSRE和AMSR2建立了2002-2015年北半球湖冰物候数据集,利用此数据集也可获得湖冰物候信息。
推荐:
便携式地物光谱仪iSpecField-NIR/WNIR
专门用于野外遥感测量、土壤环境、矿物地质勘探等领域的最新明星产品,由于其操作灵活、便携方便、光谱测试速度快、光谱数据准确是一款真正意义上便携式地物光谱仪。

无人机机载高光谱成像系统iSpecHyper-VM100
一款基于小型多旋翼无人机机载高光谱成像系统,该系统由高光谱成像相机、稳定云台、机载控制与数据采集模块、机载供电模块等部分组成。无人机机载高光谱成像系统通过独特的内置式或外部扫描和稳定控制,有效地解决了在微型无人机搭载推扫式高光谱照相机时,由于振动引起的图像质量较差的问题,并具备较高的光谱分辨率和良好的成像性能。

便携式高光谱成像系统iSpecHyper-VS1000
专门用于公安刑侦、物证鉴定、医学医疗、精准农业、矿物地质勘探等领域的最新产品,主要优势具有体积小、帧率高、高光谱分辨率高、高像质等性价比特点采用了透射光栅内推扫原理高光谱成像,系统集成高性能数据采集与分析处理系统,高速USB3.0接口传输,全靶面高成像质量光学设计,物镜接口为标准C-Mount,可根据用户需求更换物镜。

审核编辑黄宇
-
传感器
+关注
关注
2577文章
55445浏览量
793730 -
监测
+关注
关注
2文章
4420浏览量
47504 -
遥感
+关注
关注
0文章
258浏览量
17600 -
机器学习
+关注
关注
67文章
8561浏览量
137208
发布评论请先 登录
昆明理工学术新突破,莱森光学设备慧眼识锂矿

科学岛团队在高增益光纤固体混合单频Innoslab激光放大技术方面取得研究进展

多光谱图像颜色特征用于茶叶分类的研究进展

高光谱成像在作物长势监测和产量预估的研究进展
高光谱成像在作物病虫害监测的研究进展

上海光机所在全息光刻研究方面取得进展
科学岛团队在红外光谱遥感分析方法领域取得新进展
不开矿也能看成分?高光谱成像相机让找矿更简单-莱森光学
上海光机所在激光烧蚀曲面元件理论研究中取得新进展
上海光机所在单层WSe2光学双稳态研究方面取得进展
高压放大器在光学研究中的应用
微双重驱动的新型直线电机研究
氧化镓射频器件研究进展




评论