 实例S7-1200“运动”控制,插入工艺对象“轴”
实例S7-1200“运动”控制,插入工艺对象“轴”
要创建工艺对象“轴”,请按以下步骤操作:
1. 在项目树中创建新的工艺对象。
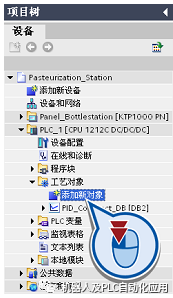
2. 创建新对象“轴”。

创建了工艺对象“轴”。 该对象存储在项目树的“工艺对象”(Technology objects) 文件夹中。
在下一部分,将介绍如何组态所创建的工艺对象。
组态工艺对象“ 轴”
要组态驱动器控制,请按以下步骤操作:
1. 选择 PTO 驱动器控制的脉冲输出“Pulse_1”并切换到设备组态。
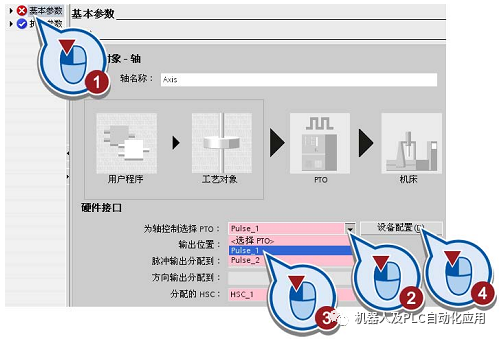
选择“Pulse_1”时,将自动分配高速计数器“HSC_1” 。 设备视图随即打开。
2. 激活脉冲发生器。
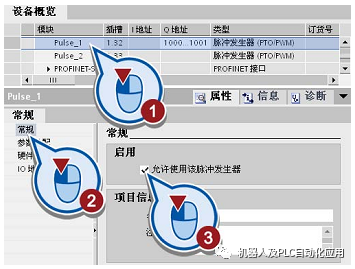
3. 使用参数分配将脉冲发生器组态为 PTO 。

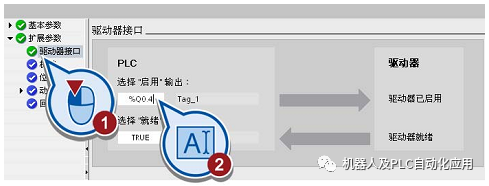
4. 指定启用驱动器所使用的 PLC 输出。
5. 单击工具栏上的“保存”(Save) 按钮以保存该项目。
已将创建的工艺对象“轴” 分配给脉冲发生器“Pulse_1”并将其参数化为 PTO 。 高速计数器“HSC 1” 已自动激活。 通过脉冲发生器输出的脉冲将借助高速计数器进行计数。
如果已正确组态工艺对象,则“基本参数”(Basic parameters) 区域的状态和“扩展参数”(Extended parameters) 区域的状态将在组态窗口中以绿色显示。
启用轴
以下步骤介绍了如何启用传送带的电机轴。
要启用或禁用轴,请使用电机控制指令“MC_Power” 。 必须在程序中为每个轴调用一次该指令。
使用运动控制指令“MC_Power” 可集中启用或禁用轴。
● 如果启用了轴,则分配给此轴的所有运动控制指令都将被启用。
● 如果禁用了轴,则用于此轴的所有运动控制指令都将无效。 将中断当前的所有作业。
1. 在组织块“Main [OB1]” 中创建新程序段。
2. 在新程序段中创建运动控制块“MC_Power” 。
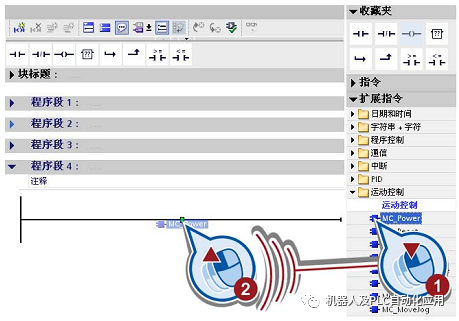
3. 对创建新数据块进行确认。

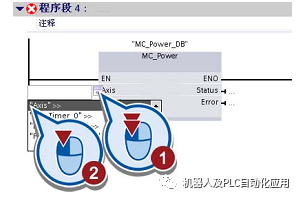
4. 在“轴”(Axis) 输入端,选择先前组态的“轴”(Axis) 。
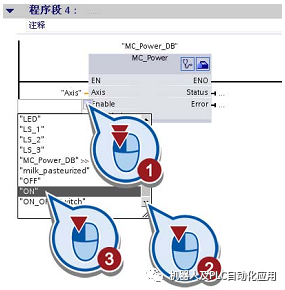
5. 在“使能”(Enable) 输入端,选择“ON”变量。
6. 保存项目。
在程序中插入了用于启用轴的指令“MC_Power” 并将其分配给了工艺对象“轴”。
是否启用轴取决于“使能”(Enable) 输入中“ON”变量的值:
● “ON”变量位的值为“0”(机器关闭)时,禁用轴。
● “ON”变量位的值为“1”(机器接通)时,启用轴。
在下一部分,将介绍如何对传送带相对于起始点的运动进行编程。
审核编辑 :李倩
-
驱动器
+关注
关注
52文章
8237浏览量
146384 -
计数器
+关注
关注
32文章
2256浏览量
94584 -
脉冲发生器
+关注
关注
5文章
177浏览量
34179
原文标题:实例S7-1200 “ 运动” 控制,插入工艺对象“ 轴”
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐


基于S7-1200的运动控制功能介绍

基于S7-1200的PLC的编程及扩展
基于S7-1200与S120实现TO位置控制的设计

基于S7-1200PLC运动控制编程及调试

S7-1200连接V90实现位置闭环控制设计

S7-1200运动控制的结构及原理

西门子S7-1200与V80伺服进行运动控制实例

西门子S7-1200运动控制指令的使用
S7-1200与S7-300的选型区别

西门子S7-1200与S7-300PLC之间的区别有哪些?





 工商网监
工商网监
评论