 让地平线X3运行PX4(硬件篇)
让地平线X3运行PX4(硬件篇)
现在看下来开源的飞控已经很稳定了,就是PX4和APM(国内有个基于模型开发的,不过在国外,全球的市场看,不太行,加油吧~),剩下就是FPV这块了,也是一个树下7个娃。接着就是一些开源的小飞控。
所以对于现在不用DJI商用飞控这些无人机,那现在选择也就是PX4了,至于为什么不是APM,我也说不明白,PX4总体是更高级一些的,而且在设计之初就选用很好的技术路线,所以也是高端和专业的代名词。
PX4,一种是开发板就是上面有IMU,MCU,接口什么的,专注于飞行本身。还有一种是偏向于上层控制的,就是一个较强的计算模块来发送飞行指令的。
随着开源硬件树莓派,这些廉价的ARM硬件盛行,有人就在想,和PX4飞行固件能不能碰撞出不一样的火花,那有人就想,直接让树莓派运行固件就好。

就是这样
树莓派硬件运行PX4飞控固件, 这文章好像是21年写的。
当时的文章现在在现在看起来是有点呆逼的
重温这篇文章,或是重写这个文章的理由也很简单,重温这个硬件,以及试着给地平线设计一个飞行的载板,地平线的边缘算力是有点强的。
闲话不多说,开始!
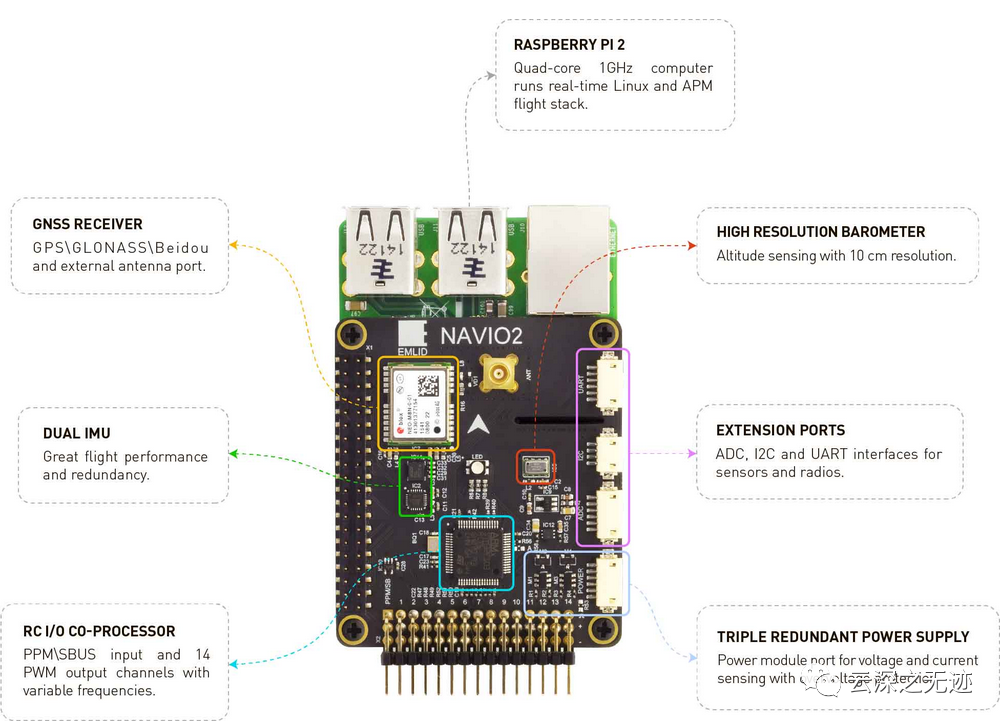
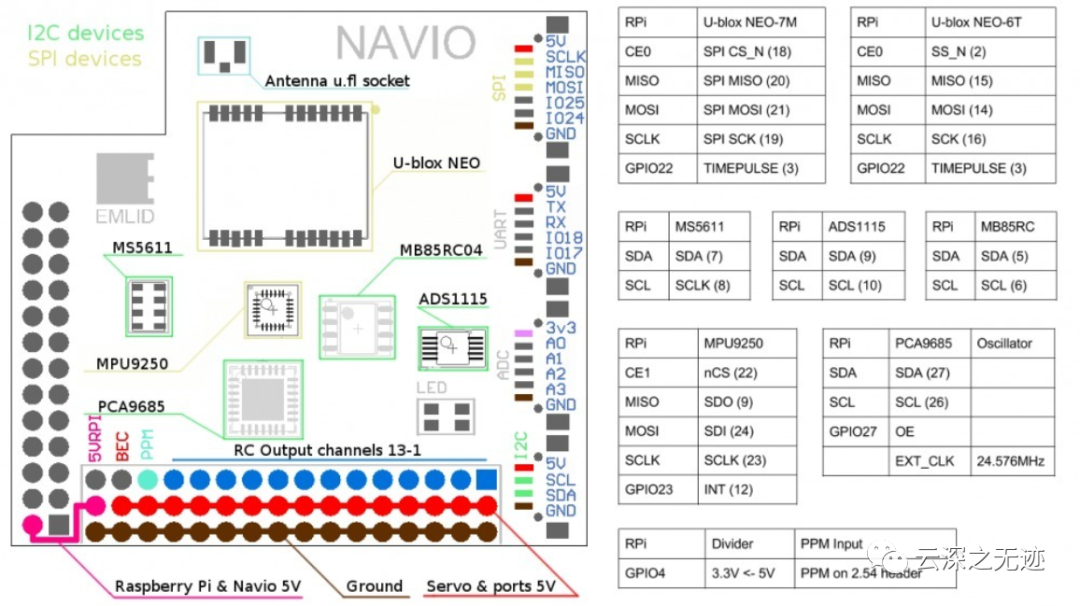
我们从板子的设计上面看,就是6个功能块:GPS,双路的IMU,多样的RC输入,气压,额外的接口(ADC,I2C,UART),电源控制。
1. 双IMU芯片。Navio2采用两只IMU芯片,既可以提高飞行性能,也实现了冗余设计,提高了可靠性。
2. 改进的MS5611性能。之前MS5611与总线上其他芯片共享,会产生噪声。Navio2独立MS5611于I2C总线上,消除了这一影响。
3. 用微控制器代替PCA9685 PWM发生器。之前版本采用PCA9685芯片产生PWM,但其每个通道的频率不能独立控制,给马达和舵机带来问题。Navio2采用微控制器代替,可以按组设置每个输出通道的频率,解决这个问题。
4. PPM/SBUS解码由微控制器代替DMA完成。之前Navio+采用DMA采样PPM信号,占用大量系统资源。Navio2由微控制器完成PPM/SBUS采样,释放Raspberry Pi 2的处理器核心用于其他任务。
5. AUX SPI。Navio2是第一个利用Raspberry Pi的AUX SPI控制器的HAT。两个SPI控制器允许更有效地分配传感器。
6. ADC接口。之前Navio+的ADC通道只在板底的焊盘上可用,不方便。Navio2的这些通道在DF13接口上可方便访问。
7. 更好的Linux集成。PWM、ADC、SBUS和PPM通过Linux sysfs集成,可以方便从任何编程语言访问。未来会有更深入的集成。
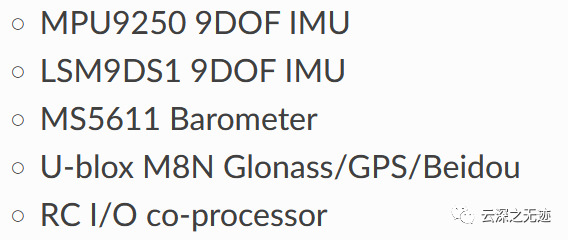
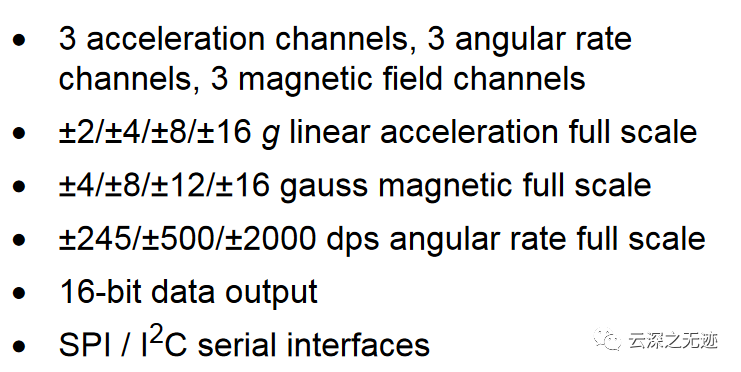
具体的传感器就是这几个
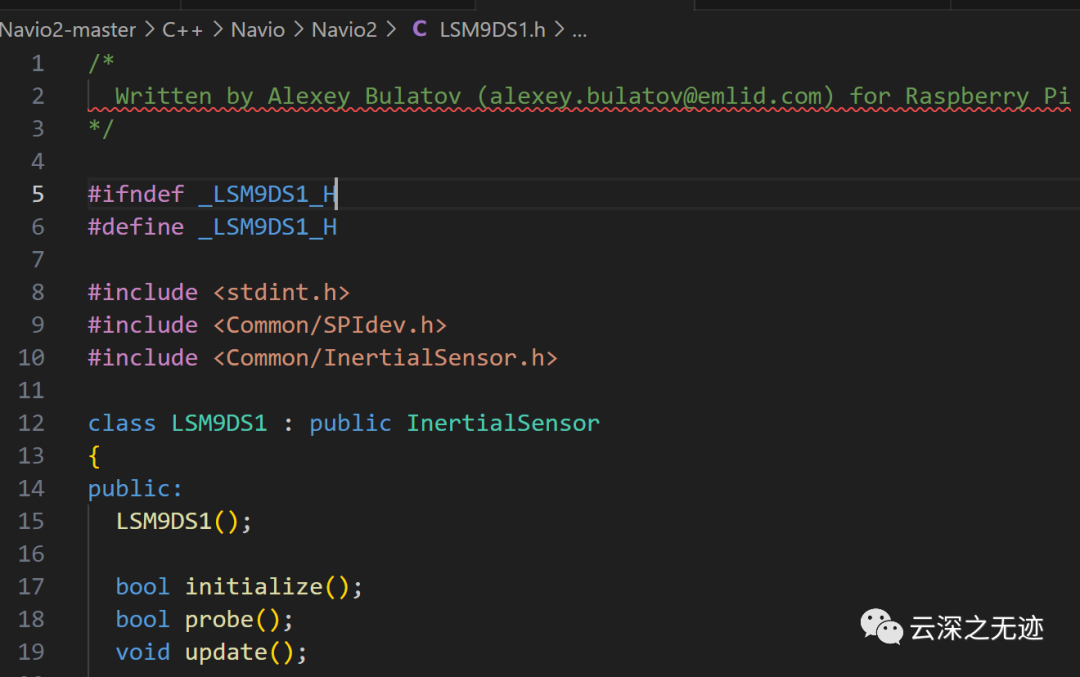
因为还面临一个硬件驱动的问题,所以给出的驱动代码也要学习!
MPU9250,实际上是内部集成了一个 MPU6500 六轴传感器和一个 AK8963 三轴磁力计,他们共用一个 IIC 接口,这样组合成一个九轴传感器。
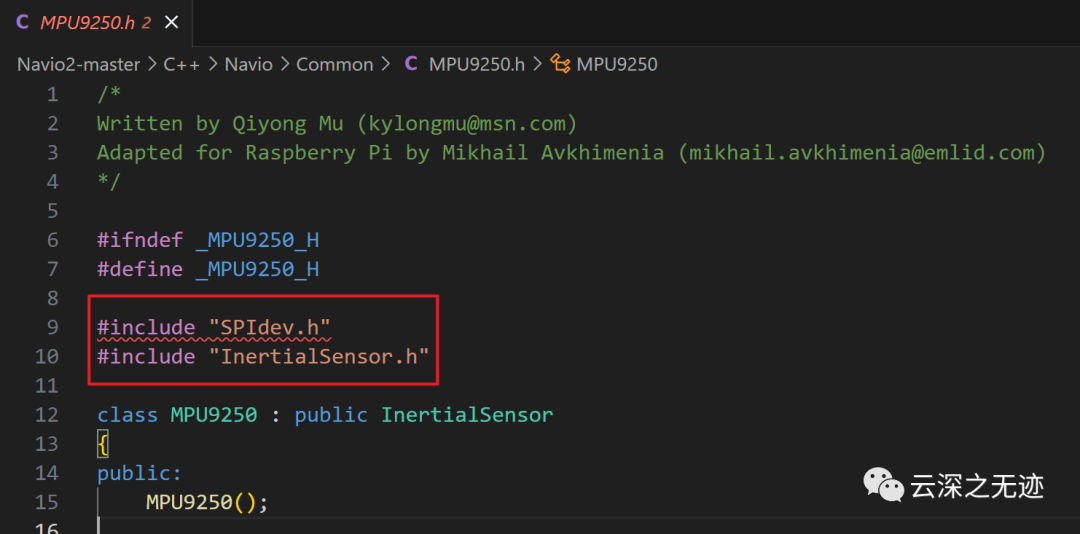
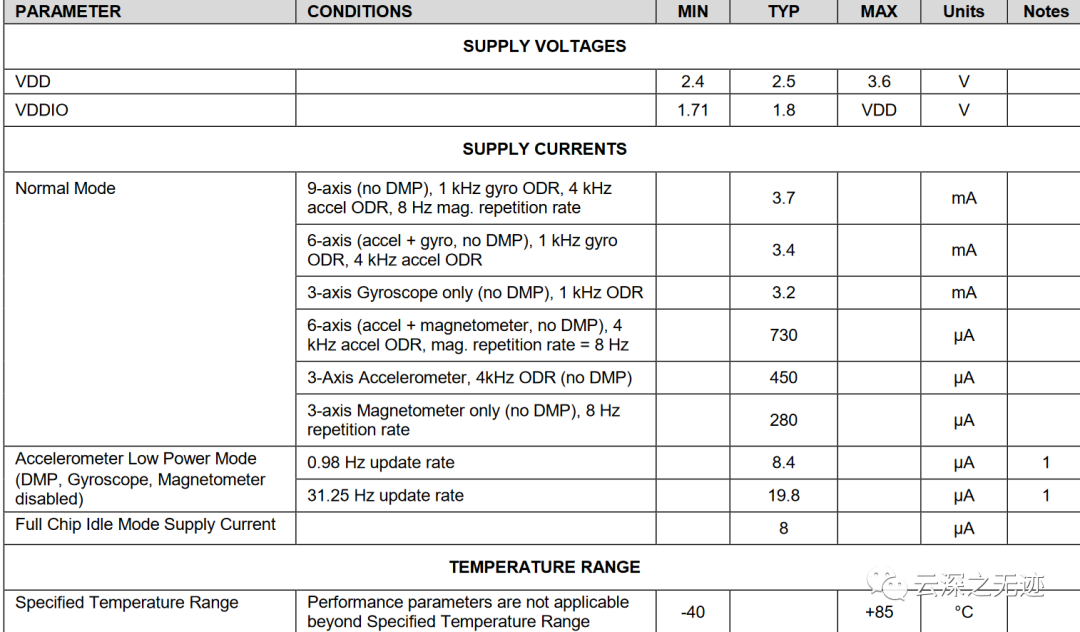
MPU9250使用的是SPI,20Mhz的采样频率
函数库很简单的,就是一个更新函数就可以得到数据的
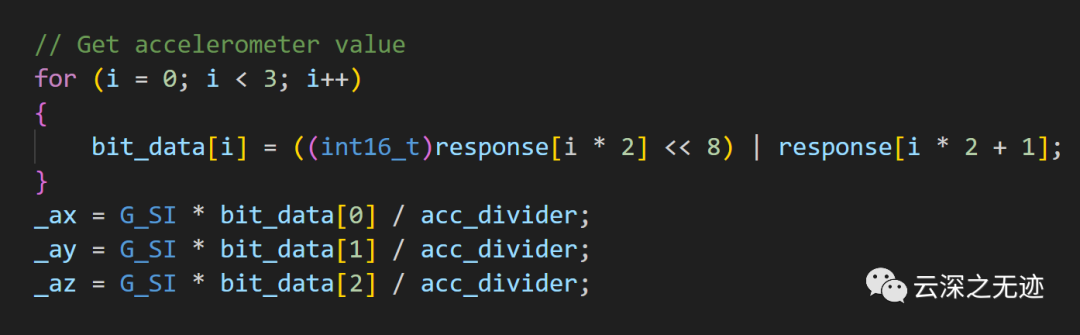
写一个获取ACC的函数
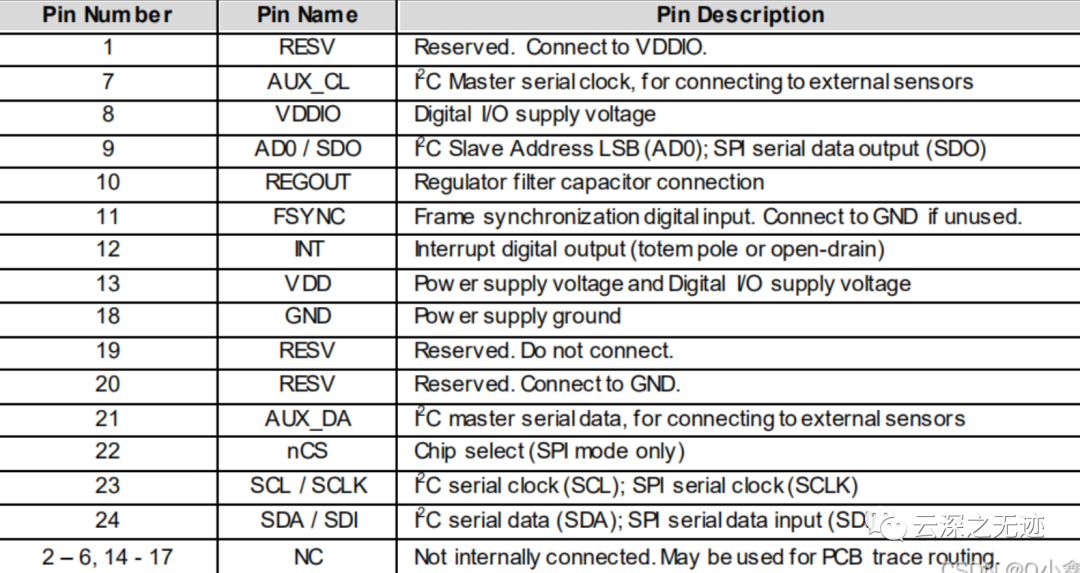
这个是芯片的引脚,现在的资料都是IIC的,SPI的设计需要看芯片手册的
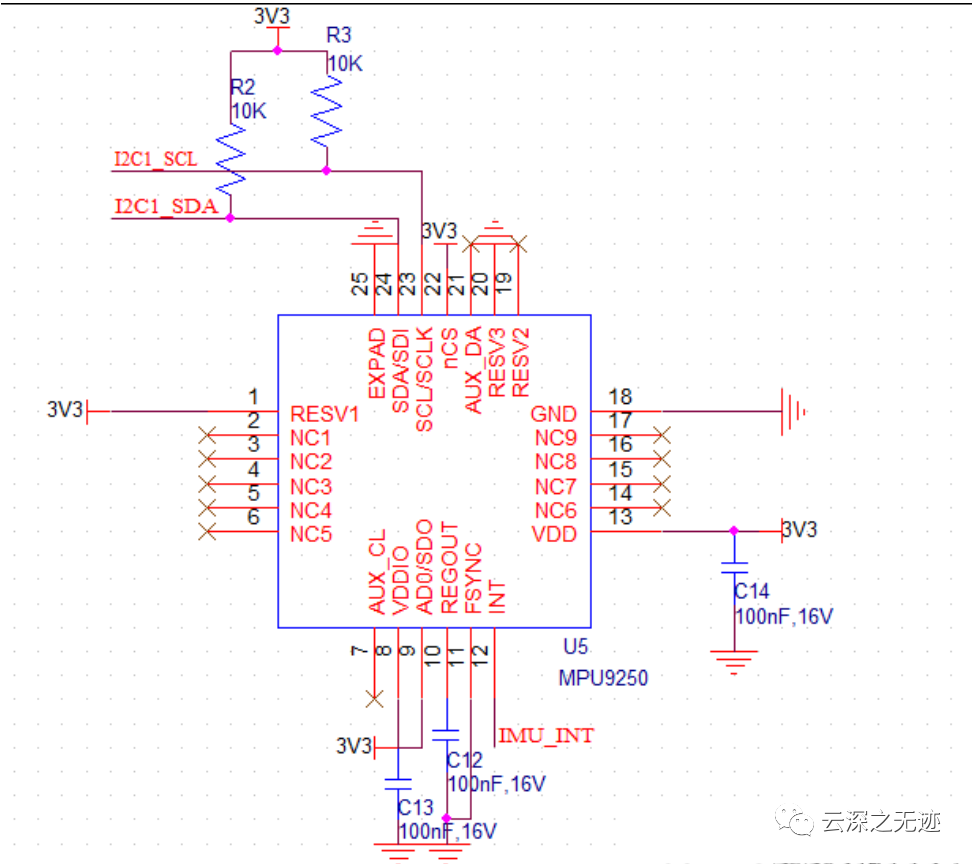
这里放一个IIC的原理图

SPI的使用就是传输速率很稳定性上面
MPU9250内置惯性测量单元(IMU)芯片可以通过SPI接口或IIC接口与主机通信。相比而言,SPI接口有以下优点:
1. 速度更快。SPI通常可以达到更高的通信速度,最大可以达到10MHz以上。IIC通常最高只有400KHz,通信速度较慢。
2. 并行通信。SPI采用并行通信,可以同时发送和接收多位数据,通信效率更高。IIC采用串行通信,一次只能发送和接收1位数据。
3. 更简单。SPI只需要4条线(SCLK,MOSI,MISO,CSN)即可完成全双工通信。IIC需要至少2条线(SDA,SCL),通信协议也较为复杂。
4. 可实现更长传输距离。采用SPI可以实现较长(10米以上)的传输距离。IIC由于采用开漏输出,传输距离较短,一般只有几米。
5. 支持更高灵活性。SPI通信可以由片选信号(CSN)控制从机,主机可以与多个从机通信; each从机也可以有自己的通信速率。IIC只能固定通信,通信速率也相同。
6. 更强的抗干扰能力。SPI采用差分信号,对噪声更加鲁棒。IIC易受电磁干扰影响,通信质量较差。
ST的这个IMU,我源码里面没有找到驱动?
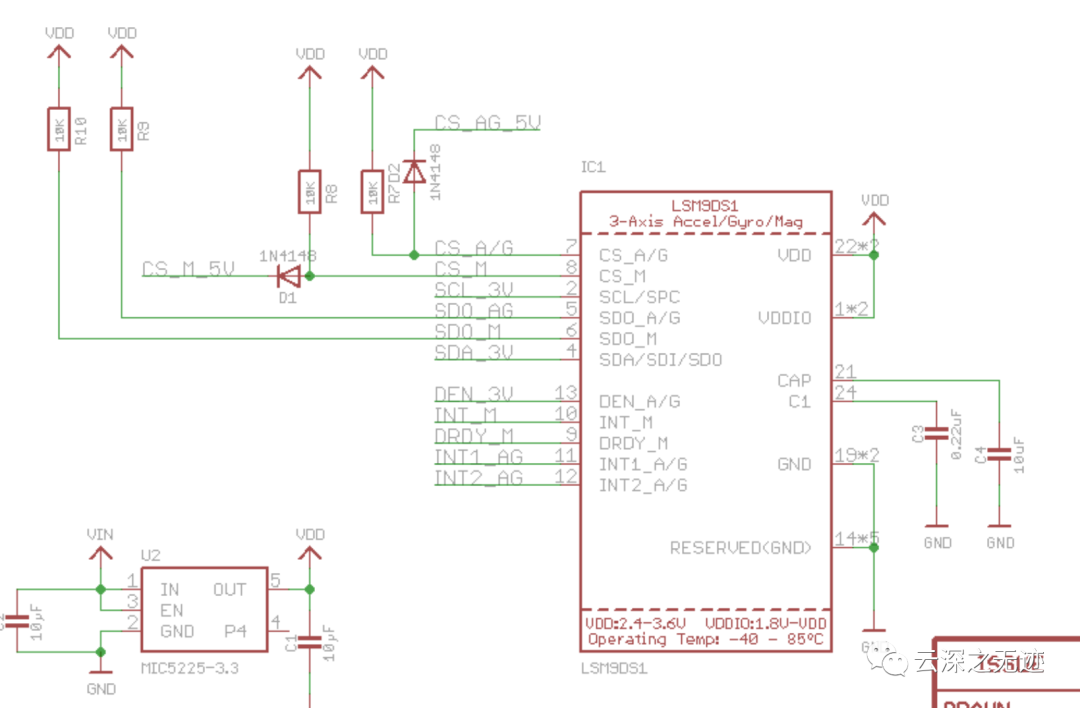
随便看了看,IIC,不是SPI的
数据手册里面有
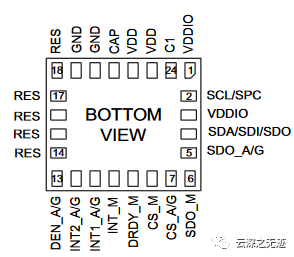
芯片的引脚图
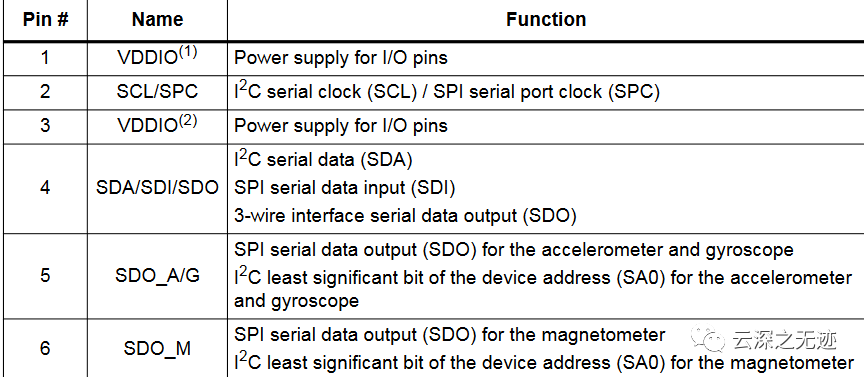
定义
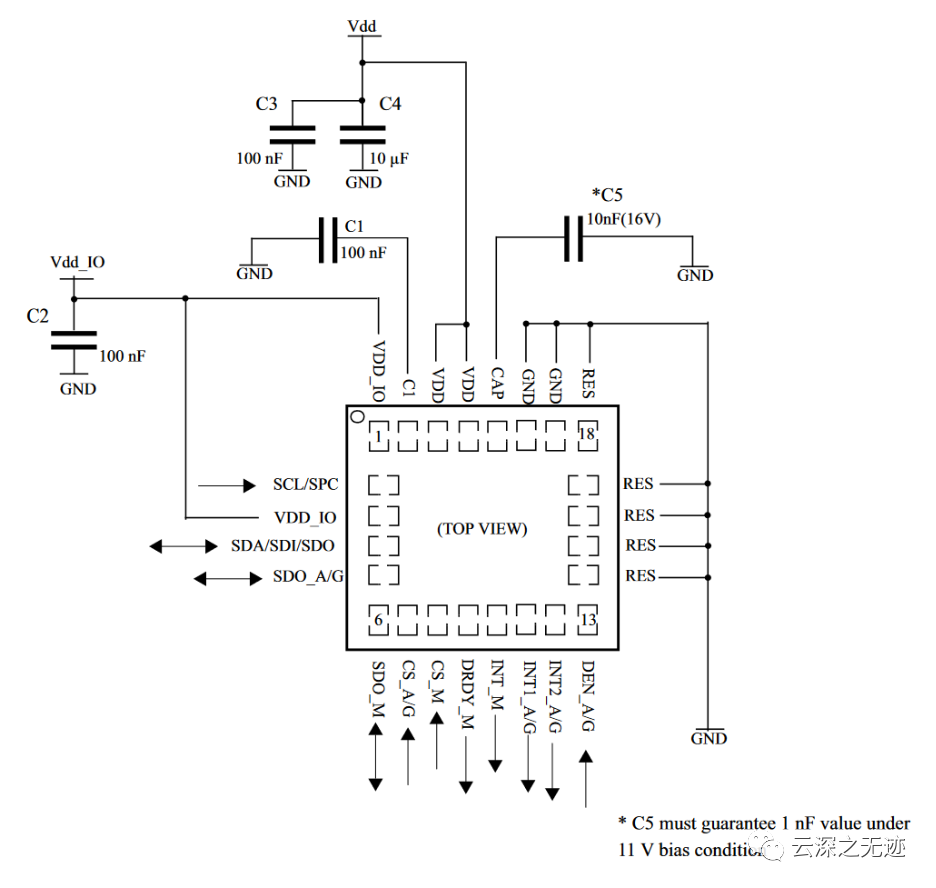
原理图

两个IMU,SPI的接口
emmmm,我要不是搞错了+和2这个版本,要不就是驱动里面没有写这个芯片的驱动。
写了,我搞错了。
也是SPI的
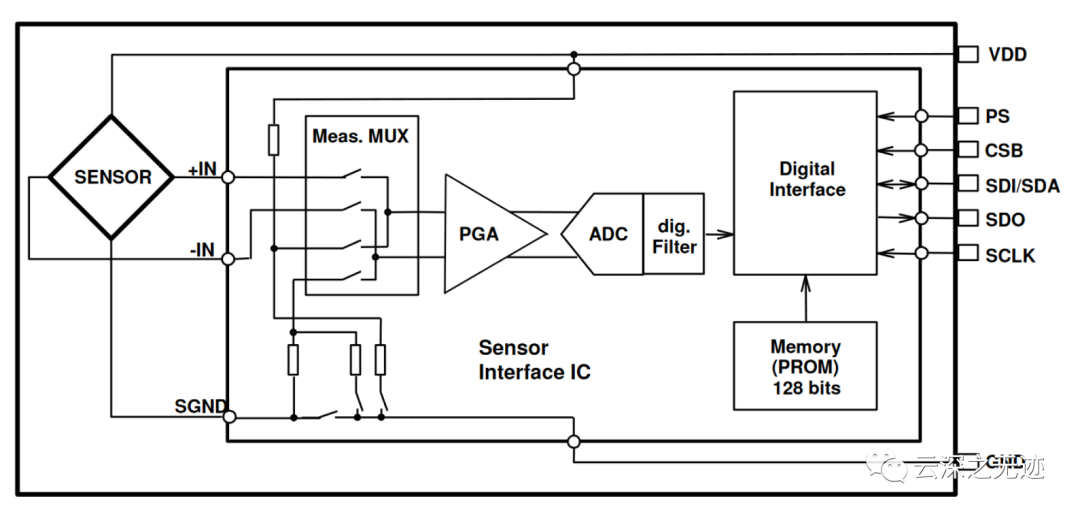
这个是气压传感器,电阻桥
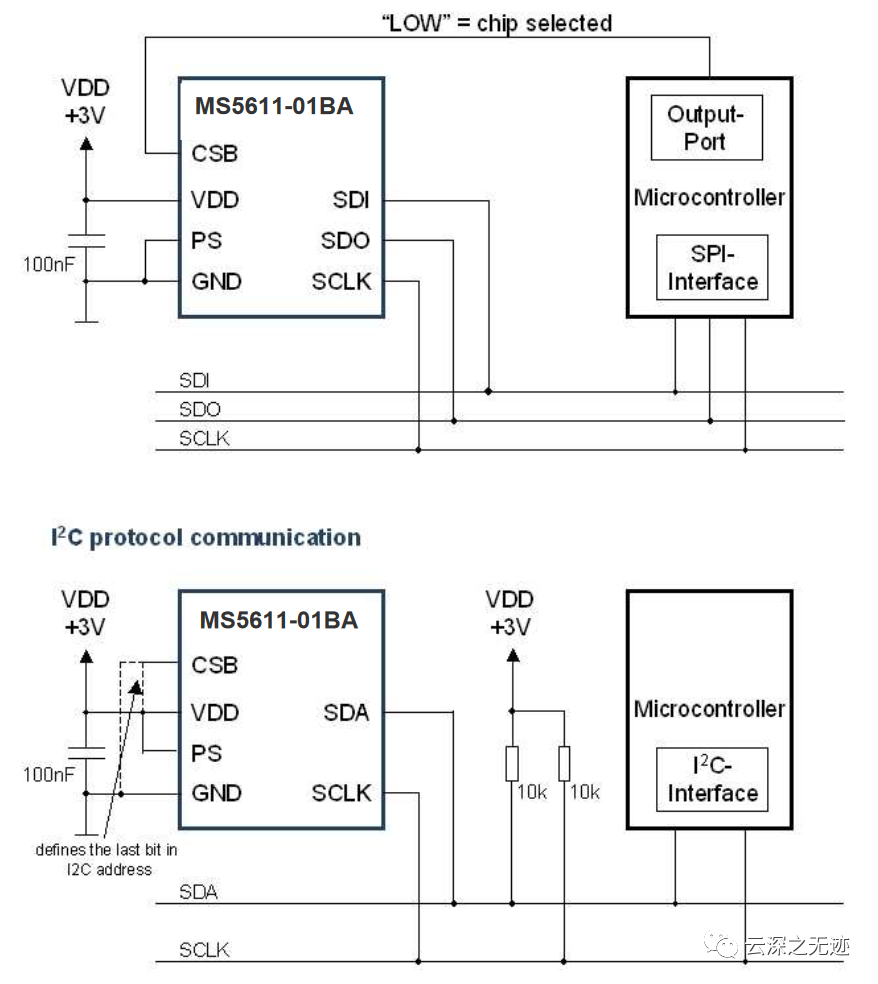
气压传感器是使用的IIC

这个是2,最大的改变就是STM32芯片的引入是处理RC信号的

这个是+,两个版本

这个是老版本的
Selected: MPU9250 Connection established: True Acc: +0.014 +0.139 +9.974 Gyr: -0.042 +0.022 +0.011 Mag: -3525.450 +29.584 +0.000 Acc: -0.010 +0.268 +10.036 Gyr: -0.042 +0.019 +0.015 Mag: -14.963 +43.390 -50.130 Acc: -0.010 +0.278 +9.888 Gyr: -0.043 +0.021 +0.012 Mag: -16.566 +42.852 -50.302 Acc: +0.010 +0.187 +10.041 Gyr: -0.039 +0.021 +0.011 Mag: -14.963 +42.314 -50.817 Acc: -0.062 +0.158 +9.855 Gyr: -0.039 +0.020 +0.011 Mag: -15.497 +42.493 -49.959 Acc: -0.067 +0.196 +10.056 Gyr: -0.044 +0.020 +0.013 Mag: -14.963 +43.748 -50.130
打印出来的数据
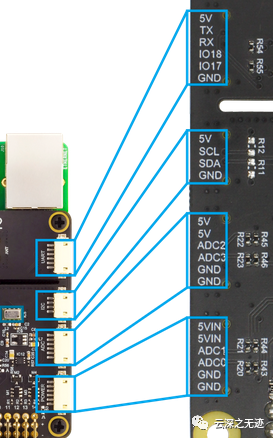
这个是扩展的接口

这个就是有趣的东西,有了这个就可以设计电路板了
2代少了PWM的驱动芯片,ADS1115,ADC转换芯片。
这个好像是一代的引脚来着
这东西不难设计,主要是不想自己写驱动,想直接用。

还有这个小玩意儿,我也是设计完了,上图是印度小哥的
目前,我就绘制IMU,GPU,留些接口就行,这个STM32的设计是需要一些时间的。
审核编辑 :李倩
-
微控制器
+关注
关注
48文章
7482浏览量
151010 -
gpu
+关注
关注
28文章
4700浏览量
128672 -
地平线
+关注
关注
0文章
336浏览量
14906
原文标题:让地平线X3运行PX4(硬件篇)
文章出处:【微信号:TT1827652464,微信公众号:云深之无迹】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【 地平线旭日X3派试用体验】#旭日X3派首百尝鲜#资料下载及环境搭建初试
【地平线旭日X3派试用体验】开箱+快速上手体验
【地平线旭日X3派试用体验】开箱篇硬件介绍
【 地平线旭日X3派试用体验】 HHP环境搭建及简单demo演示
【 地平线旭日X3派试用体验】01. X3派开箱及上手
【 地平线旭日X3派试用体验】地平线旭日X3派AGV智能车设计
【地平线旭日X3派试用体验】地平线旭日X3派AGV智能车设计
【地平线旭日X3派试用体验】X3派开箱及开发环境搭建
【地平线旭日X3派试用体验】01.X3派开箱及上手



地平线RDK X3语音算法通过Alexa ACM方案认证






 工商网监
工商网监
评论