 汽车LED驱动电路的设计方案
汽车LED驱动电路的设计方案
在汽车或汽车中,LED已发展成为照明的首选。无论是后尾灯还是仪表盘中的指示灯,如下图 1 所示,如今都集成了LED。其紧凑的尺寸有助于设计的多功能性,并提供与车辆预期寿命本身一样耐用的期望。
在汽车或汽车中,LED已发展成为照明的首选。无论是后尾灯还是仪表盘中的指示灯,如下图 1 所示,如今都集成了LED。其紧凑的尺寸有助于设计的多功能性,并提供与车辆预期寿命本身一样耐用的期望。
LED实际上是一个P型N型(PN)结二极管,它允许电流仅在一个方向上通过它。一旦 LED 两端的电压达到最小正向电压(VF),电流就开始流动。
LED的照明水平或亮度由正向电流(IF)决定;而 LED 消耗的电流取决于施加在 LED 上的电压。
尽管LED亮度和正向电流IF是线性相关的,但即使LED两端的正向电压VF略有增加,也会引发LED电流摄入的快速增加。
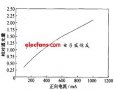
具有不同颜色规格的 LED 由于其特定的半导体成分而具有不同的 VF 和 IF 规格(图2)。有必要考虑每个LED的数据表规格,特别是在单个电路中应用不同颜色的LED时。
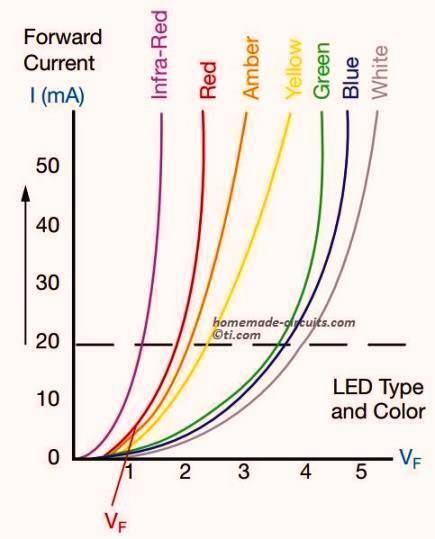
图 #2
例如,当使用红绿蓝 (RGB) 照明进行开发时,红色 LED 的正向电压额定值可能约为 2 V,而蓝色和绿色 LED 的额定电压可能在 3 至 4 V左右。
考虑到您采用单个公共电源操作这些 LED,您可能需要为每个彩色 LED 配备一个计算良好的限流电阻,以避免 LED 劣化。
热效率和功率效率
除了电源电压和电流参数外,温度和功率效率同样需要仔细分析。虽然,施加在LED上的大部分电流被转换为LED光,但少量功率在器件的PN结内转化为热量。
LED结上产生的温度可能会受到一些外部参数的严重影响,例如:
通过大气温度(TA),
通过LED结和环境空气之间的热阻(RθJA),
以及功耗 (PD)。
以下公式1揭示了LED的功耗规格PD:
PD =VF × IF ------------方程 #1
借助上述方法,我们可以进一步推导出以下计算LED结温(TJ)的方程:
TJ = TA + RθJA × PD ---------- 方程 #2
不仅在正常工作条件下,而且在设计的绝对最高环境温度TA下,对于最坏情况的关注,确定TJ至关重要。
随着LED结温TJ的升高,其工作效率下降。LED 的正向电流 IF 和结温 TJ 必须保持在数据手册分类的绝对最大额定值以下,以防止损坏(图
3)。

图 #3
除了LED,您还应考虑电阻和驱动元件(如BJT和运算放大器)的功率效率,特别是随着分立元件数量的增加。
驱动器级的电源效率不足、LED导通时间和/或环境温度所有这些因素都可能导致器件温度升高,影响BJT驱动器的电流输出,并降低LED的VF降。
随着温度的升高降低LED的正向压降,LED的电流消耗率上升;导致功率耗散PD和温度成比例增加,这导致LED的正向压降VF进一步降低。
这种温度持续上升的循环,也称为“热失控”,迫使LED在最佳工作温度以上工作,导致快速退化,并在某个时候器件发生故障,因为中频消耗水平增加。
线性 LED 驱动器
通过晶体管或IC线性操作LED实际上非常方便。在所有可能性中,控制LED的最简单方法通常是将其直接连接到电源电压源(VS)。
使用合适的限流电阻可限制器件的电流消耗,并固定LED的精确压降。以下公式3可用于计算串联电阻(RS)值:
借助上述方法,我们可以进一步推导出以下计算LED结温(TJ)的方程:
TJ = TA + RθJA × PD ---------- 方程 #2
不仅在正常工作条件下,而且在设计的绝对最高环境温度TA下,对于最坏情况的关注,确定TJ至关重要。
随着LED结温TJ的升高,其工作效率下降。LED 的正向电流 IF 和结温 TJ 必须保持在数据手册分类的绝对最大额定值以下,以防止损坏(图
3)。
图 #3
除了LED,您还应考虑电阻和驱动元件(如BJT和运算放大器)的功率效率,特别是随着分立元件数量的增加。
驱动器级的电源效率不足、LED导通时间和/或环境温度所有这些因素都可能导致器件温度升高,影响BJT驱动器的电流输出,并降低LED的VF降。
随着温度的升高降低LED的正向压降,LED的电流消耗率上升;导致功率耗散PD和温度成比例增加,这导致LED的正向压降VF进一步降低。
这种温度持续上升的循环,也称为“热失控”,迫使LED在最佳工作温度以上工作,导致快速退化,并在某个时候器件发生故障,因为中频消耗水平增加。
线性 LED 驱动器
通过晶体管或IC线性操作LED实际上非常方便。在所有可能性中,控制LED的最简单方法通常是将其直接连接到电源电压源(VS)。
使用合适的限流电阻可限制器件的电流消耗,并固定LED的精确压降。以下公式3可用于计算串联电阻(RS)值:
RS = VS - VF / IF ---------- 等式 #3
参考图 #4,我们看到 3 个 LED 串联使用,VF 计算应考虑 3 个 LED 上的整个压降 VF(LED 的正向电流 IF 保持不变)。

图 #4
虽然这可能是最简单的LED驱动器配置,但在实际实现中可能非常不切实际。
电源,尤其是汽车电池,容易受到电压波动的影响。
电源输入的微小增加会触发LED消耗更多的电流,从而被破坏。
此外,电阻中过大的功率耗散PD会增加器件温度,从而导致热失控。
面向汽车应用的分立式恒流LED驱动器
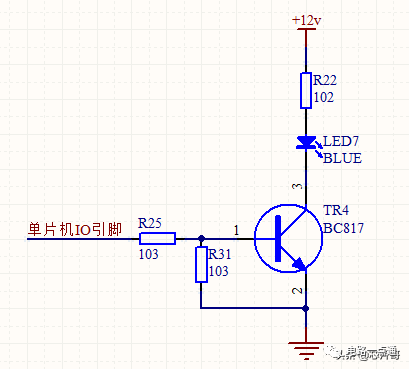
当使用恒流功能时,它可确保增强的节能和可靠的布局。由于最普遍的LED操作技术是通过开和关开关,因此晶体管可实现良好调节的电流供应。

图 #5
参考上面的图5,根据LED配置的电压和电流规格,可以选择BJT或MOSFET。与电阻器相比,晶体管易于处理更大的功率,但容易受到电压上下和温度变化的影响。例如,当BJT周围的电压上升时,其电流也会成比例增加。
为了保证额外的稳定性,可以定制这些BJT或MOSFET电路,以提供恒定电流,尽管电源电压不平衡。
设计 LED 电流源
图6至图8展示了一些电流源电路图示。
在图6中,齐纳二极管在晶体管基极产生稳定的输出电压。

限流电阻RZ确保受控电流,使齐纳二极管正常工作。
齐纳二极管输出产生恒定电压,不受电源电压波动的影响。
发射极电阻RE上的压降应补充齐纳二极管的压降,因此晶体管调节集电极电流;这可确保通过LED的电流始终保持恒定。
使用运算放大器反馈
在下面的图7中,显示了具有反馈环路的运算放大器电路,用于构建理想的汽车LED控制器电路。反馈连接确保输出自动调整,以便在负输入处产生的电位保持等于其正基准输入。

齐纳二极管被箝位以在运算放大器的同相输入端产生基准电压。如果LED电流超过预定值,它会在检测电阻RS上产生成比例的电压,试图超过齐纳参考值。
由于这会导致运算放大器负反相输入端的电压超过正基准齐纳值,因此迫使运算放大器输出关闭,从而降低LED电流以及RS两端的电压。
这种情况再次将运算放大器输出恢复为开启状态并激活LED,运算放大器的这种自调节动作继续无限确保LED电流永远不会超过计算出的不安全水平。

上面的图 8 显示了使用几个 BJT
完成的另一种基于反馈的设计。在这里,电流通过R1流动,接通晶体管Q1。电流继续通过R2,固定正确的电流量通过LED。
如果通过R2的LED电流试图超过预定值,R2两端的压降也会成比例增加。当这个压降上升到晶体管Q2的基极到发射极电压(Vbe)时,Q2开始导通。
Q2现在开始通过R1吸收电流,迫使Q1开始关闭,并且条件保持自我调节通过LED的电流,确保LED电流永远不会超过不安全的水平。
这种带反馈环路的晶体管限流器根据R2的计算值保证为LED提供恒定电流。在上面的例子中,实现了BJT,但对于更高电流的应用,在该电路中使用MOSFET也是可行的。
使用集成电路的恒流LED驱动器
这些基本的基于晶体管的构建模块可以很容易地复制来操作多个LED串,如图9所示。

控制一组 LED 串会导致元件数量增加,占用更高的 PCB 空间并消耗更多通用输入/输出 (GPIO) 引脚。
而且,这样的设计基本上没有亮度控制和故障诊断的考虑,这是大多数功率LED应用的基本需求。
要包括亮度控制和故障诊断等规格,需要额外数量的分立元件和额外的设计分析程序。
包含更多LED的LED设计会导致分立电路设计包含更多数量的零件,从而增加电路的复杂性。
为了简化设计过程,应用专用IC作为LED驱动器被认为是最有效的。如图9所示,使用基于IC的LED驱动器可以简化图10所示的许多分立元件。

图 #10
LED 驱动器 IC 专为处理 LED 的关键电压、电流和温度规格而设计,并可最大限度地减少器件数量和电路板尺寸。
此外,LED驱动器IC可能具有用于亮度控制和诊断的附加功能,包括过温保护。也就是说,使用基于BJT的分立设计也可以实现上述高级功能,但相对而言,IC似乎是一种更容易的选择。
汽车 LED 应用的挑战
在许多汽车LED实现中,亮度控制成为一种必不可少的问题。
由于通过LED调节正向电流IF按比例调节亮度水平,因此可以采用模拟设计来实现结果。LED亮度控制的数字方法是通过PWM或脉宽调制。以下详细介绍了这两个概念,并展示了如何将它们应用于汽车LED应用
模拟和PWM LED亮度控制之间的差异
图11评估了控制LED亮度的模拟和数字方法之间的主要区别。

图 #11
通过使用模拟LED亮度控制,LED照明通过流动电流的大小来改变;电流越大,亮度越大,反之亦然。
但是,模拟调光或亮度控制的质量并不令人满意,特别是在较低的亮度范围内。模拟调光通常不适用于与颜色相关的 LED 应用,如 RGB
照明或状态指示灯;因为不同的IF往往会影响LED的颜色输出,导致RGB LED的颜色分辨率较差。
相比之下,基于PWM的LED调光器不会改变LED正向电流IF,而是通过改变LED的ON/OFF开关速率来控制强度。然后,平均导通时间LED电流决定LED上的比例亮度。它也被称为占空比(脉冲宽度与PWM脉冲间隔的比值)。通过PWM,更高的占空比会导致通过LED的平均电流更高,从而导致更高的亮度,反之亦然。
由于您可以根据各种照明范围微调占空比,因此与模拟调光相比,PWM 调光有助于实现更宽的调光比。
虽然PWM保证了增强的亮度控制输出,但它需要更多的设计分析。PWM频率必须比我们的视觉可以感知的要高得多,否则LED最终可能会看起来像在闪烁。此外,PWM调光电路因产生电磁干扰(EMI)而臭名昭著。
来自 LED 驱动器的干扰
在EMI控制不足的情况下构建的汽车LED驱动器电路可能会对其他相邻的电子软件产生不利影响,例如在收音机或类似的敏感音频设备中产生嗡嗡声。
LED驱动器IC当然可以为您提供模拟和PWM调光功能,以及解决EMI问题的补充功能,例如可编程压摆率,或输出通道相移或群延迟。
为了能够向汽车用户提供诊断警报,车身控制模块(BCM)中的智能高边开关通过尾灯元件记录故障,如上图12所示。
话虽如此,通过BCM识别LED故障可能很复杂。有时,您可能会使用相同的BCM板设计来检测基于白炽灯泡的标准电路或基于LED的系统;因为与白炽灯泡相比,LED电流往往要小得多,因此区分了逻辑LED负载。
结论
如果电流检测诊断设计不准确,则可能难以识别开路或断开的负载。BCM 无需使用单个开路 LED 串,而是更容易检测到整个 LED
串,以报告开路负载情况。一种条件,可确保如果单 LED 出现故障,则可以执行全 LED 故障标准,以便在检测到单个 LED 故障时关闭所有
LED。汽车线性LED驱动器包括允许一个故障-所有故障反应的功能,并且可以识别多个IC配置中的公共误差总线。
-
led
+关注
关注
242文章
23275浏览量
660813 -
驱动电路
+关注
关注
153文章
1530浏览量
108516 -
汽车LED
+关注
关注
0文章
5浏览量
5220
发布评论请先 登录
相关推荐
一种用于白光LED驱动的电荷泵电路的设计方案
基于MIP553的无电解电容高亮度LED驱动电源设计方案

高性能LED路灯驱动电路的设计方案
超高亮LED的驱动电路设计方案

白光LED驱动设计方案
无闪烁LED灯具驱动设计方案






 工商网监
工商网监
评论